1.本发明涉及图像处理领域,具体涉及一种基于红绿蓝二重差分的移动目标阴影实时消除方法。
背景技术:
2.阴影作为光源被物体遮挡所产生的一种自然现象,严重影响着目标检测与跟踪的效果。目前消除阴影的主要方法包括模型法与特征法。
3.模型法通常基于已知的阴影先验知识设计模型,并据此检测并消除阴影。例如:zhang等提出一种具有阴影消除的鲁棒车辆检测方法,但该方法提出的关于模型去除阴影区域的方法只适应于文章所提及的相关区域,适用范围小。benish等提出了一种使用三色衰减模型(tam)和强度信息来分割阴影区域,但该技术在去除阴影时仍需人为选择阴影区域。murali等利用对阴影区域的建模,提出一种从具有均匀纹理图像中去除阴影的技术,但该技术依然高度依赖于建模的效果。由于移动目标本身的阴影随着其移动不断变化,确定有效的先验非常困难且局限性很大。因此模型法对于移动目标的阴影消除效果不理想。
4.特征法专注于利用阴影区域本身的物理特征的相似变化检测并消除阴影,其所涉及的物理特征包括亮度、颜色、纹理、梯度、边缘等。一般认为,阴影的物理特征都相对比较稳定,因此特征法在现在的运动目标检测中应用最为广泛。例如,许宏科等利用图像log域差分思想先弱化阴影区域,再通过hsv颜色特征进行阴影消除;park则是使用阴影深度图和光照不变特征进行阴影的去除;李亚伟等提出了一种基于亮度和纹理特征的阴影弱化算法,且不需要前期训练和人工干预;陈嵘等提出的通过rgb颜色检测阴影,基于向量距离归一化nvd的分布规律进一步检测和消除阴影像素。然而,像亮度和颜色这些物理量,受光照与摄像头成像方法影响较大,因此稳定性不算太高。纹理、梯度、边缘等物理量则高度依赖于算法中涉及的超参数,因此适用性不太理想。虽然目前最新的阴影消除技术充分融合了不同物理特征的阴影检测结果来提升阴影消除的稳定性,但效果仍不够理想,并且还额外增加了较大的计算开销,难以满足目标阴影实时检测与消除的需求。
技术实现要素:
5.本发明旨在提供一种基于红绿蓝二重差分的移动目标阴影实时消除方法,该方法能够非常有效的消除阴影对目标的影响,并正确检测出目标的像素点。
6.本发明的技术方案如下:
7.所述的基于红绿蓝二重差分的移动目标阴影实时消除方法,包括以下步骤:
8.a、拍摄背景帧rgb图像bm×n×3,拍摄包含目标的当前帧rgb图像fm×n×3;
9.b、将当前帧rgb图像fm×n×3中的各个像素点分别与其在背景帧rgb图像bm×n×3中对应的像素点,按照红、绿、蓝三通道分别做差,得到红色通道像素点的一重差分结果
△rm
×n、绿色通道像素点的一重差分结果
△gm
×n、蓝色通道像素点的一重差分结果
△bm
×n;
10.c、将各个像素点的一重差分结果
△rm
×n、
△gm
×n、
△bm
×n相互再次做差,分别得到各
个像素点的红绿通道二重差分结果
△2rgm×n、红蓝通道二重差分结果
△2rbm×n、绿蓝通道二重差分结果
△2gbm×n;
11.d、将各个像素点的二重差分结果
△2rgm×n,
△2rbm×n,
△2gbm×n按对应点做均值计算,得到各个像素点的均值
△2avgm×n;
12.e、设定阈值,各个像素点的
△2avgm×n分别与阈值比较,大于阈值的,像素点值设定为255;小于等于阈值的,像素点值设定为0,构建出单通道二值图像,得到阴影消除后的目标当前帧图像。
13.所述的步骤b中,红、绿、蓝三通道分别做差的公式为:
14.[
△rm
×n,
△gm
×n,
△bm
×n]=
△fm
×n×3=bm×n×
3-fm×n×3ꢀꢀꢀ
(1)。
[0015]
所述的步骤c中,像素点的红、绿、蓝三通道像素点的一重差分结果相互再次做差的公式为:
[0016]
△2rgm×n=
△rm
×n‑△gm
×nꢀꢀꢀ
(2)
[0017]
△2rbm×n=
△rm
×n‑△bm
×nꢀꢀꢀ
(3)
[0018]
△2gbm×n=
△gm
×n‑△bm
×nꢀꢀꢀ
(4)。
[0019]
所述的步骤d中,均值计算公式为:
[0020][0021]
所述的步骤e中,阈值设定为30。
[0022]
本发明采用二重差分的思路计算图像当前帧与背景帧的关系,利用彩色图像目标阴影与原背景中红、绿、蓝三通道像素点差值相近的特点,对三通道像素点差值再相互分别做差分,然后经过二重差分,求出三个二重差分对应点均值,确保阴影像素点在二重差分计算中的稳定性之后,可以通过阈值将阴影区域消除,并直接提取出目标区域的二值图。
附图说明
[0023]
图1为实施例1的背景帧rgb图像;
[0024]
图2为实施例1的时刻一目标受阴影干扰图像;
[0025]
图3为实施例1的时刻二目标受阴影干扰图像;
[0026]
图4为实施例1的时刻三目标受阴影干扰图像;
[0027]
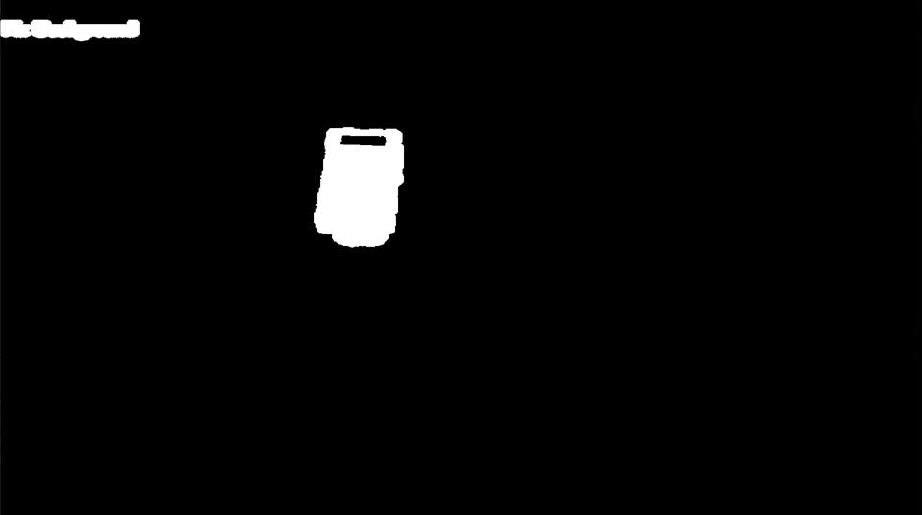
图5为实施例1的时刻一目标消除阴影干扰后的二值图;
[0028]
图6为实施例1的时刻二目标消除阴影干扰后的二值图;
[0029]
图7为实施例1的时刻三目标消除阴影干扰后的二值图;
具体实施方式
[0030]
下面结合附图和实施例具体说明本发明。
[0031]
实施例1
[0032]
所述的基于红绿蓝二重差分的移动目标阴影实时消除方法,包括以下步骤:
[0033]
a、拍摄背景帧rgb图像bm×n×3,拍摄包含目标的当前帧rgb图像fm×n×3;
[0034]
b、将当前帧rgb图像fm×n×3中的各个像素点分别与其在背景帧rgb图像bm×n×3中对应的像素点,按照红、绿、蓝三通道分别做差,得到红色通道像素点的一重差分结果
△rm
×n、
绿色通道像素点的一重差分结果
△gm
×n、蓝色通道像素点的一重差分结果
△bm
×n;
[0035]
红、绿、蓝三通道分别做差的公式为:
[0036]
[
△rm
×n,
△gm
×n,
△bm
×n]=
△fm
×n×3=bm×n×
3-fm×n×3ꢀꢀꢀ
(1);
[0037]
c、将各个像素点的一重差分结果
△rm
×n、
△gm
×n、
△bm
×n相互再次做差,分别得到各个像素点的红绿通道二重差分结果
△2rgm×n、红蓝通道二重差分结果
△2rbm×n、绿蓝通道二重差分结果
△2gbm×n;
[0038]
像素点的红、绿、蓝三通道像素点的一重差分结果相互再次做差的公式为:
[0039]
△2rgm×n=
△rm
×n‑△gm
×nꢀꢀꢀ
(2)
[0040]
△2rbm×n=
△rm
×n‑△bm
×nꢀꢀꢀ
(3)
[0041]
△2gbm×n=
△gm
×n‑△bm
×nꢀꢀꢀ
(4);
[0042]
d、将各个像素点的二重差分结果
△2rgm×n,
△2rbm×n,
△2gbm×n按对应点做均值计算,得到各个像素点的均值
△2avgm×n;
[0043][0044]
e、设定阈值为30,各个像素点的
△2avgm×n分别与阈值比较,大于阈值的,像素点值设定为255;小于等于阈值的,像素点值设定为0,构建出单通道二值图像,得到阴影消除后的目标当前帧图像。
[0045]
实验结果见图1-7,其中,图1为背景帧rgb图像,图2为时刻一目标受阴影干扰图像,图3为时刻二目标受阴影干扰图像,图4为时刻三目标受阴影干扰图像,图5为时刻一目标消除阴影干扰后的二值图,图6为时刻二目标消除阴影干扰后的二值图,图7为时刻三目标消除阴影干扰后的二值图。
[0046]
将背景帧与随机选择的三个时刻的当前帧作为输入,经过本设计的计算,最终可以得到当前帧消除阴影后的二值图。图5-7分别代表图2-4中的目标消除阴影干扰后的目标二值帧数据。明显的,本方法可以非常有效的消除阴影对目标的影响,并正确检测出目标的像素点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。