1.本发明涉及一种矿用自卸卡车自动驾驶底盘线控化系统。
背景技术:
2.由于大型自卸车的工作原理与乘用车完全不同,车辆行驶时,仅动力电路部分就涉及发电、整流、逆变、变频等多项技术;电控系统为人工驾驶车辆设计,并且为封闭式系统,未提供线控相关的接口。想要进行自动控制的改造,需要精通整车的控制原理及电路,否则无法进行。再加上此种车型只在大型露天矿中使用,所以使用、开发、维修等人员的数量都十分稀少,导致至今也没有实现从底层进行线控的解决方案。现有的底盘方案多是数据采集系统,收集车辆现有系统的数据,然后整合起来反馈给需要的系统。而对于车辆横向、纵向的运动控制,以及车辆外围电路控制,现阶段只有加装驾驶机器人这一种方案。这种方案是通过在驾驶室加装机器人进行仿真人操作,机器人通过物理控制的方式对方向盘、油门、刹车等机构进行操作。这种方案的可靠性差、控制精度差,故障率高,而能做到直接控制的方案并没有出现。
技术实现要素:
3.本发明的目的是解决上述存在的问题,提供一种将原车需要人工控制的转向阀、车斗举升系统、油门、电制动、液压制动等硬件设备,更换为可自动控制的对应设备的矿用自卸卡车自动驾驶底盘线控化系统。
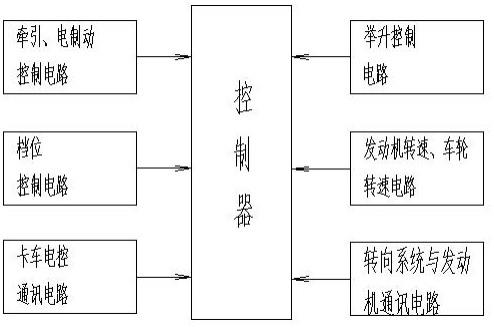
4.上述的目的通过以下的技术方案实现:一种矿用自卸卡车自动驾驶底盘线控化系统,其组成包括:控制器、牵引与电制动控制电路、档位控制电路、卡车电控通讯电路、举升控制电路、发动机转速与车轮转速电路和转向系统与发动机通讯电路;所述的牵引与电制动控制电路、所述的档位控制电路、所述的卡车电控通讯电路、所述的举升控制电路、所述的发动机转速与车轮转速电路和所述的转向系统与发动机通讯电路分别与所述的控制器电连接;所述的档位控制电路发动机熄火开关、发动机启/停开关、选择开关、制动速度控制开关和厢斗举升过载开关,所述的制动速度控制开关和所述的厢斗举升过载开关分别与所述的选择开关电连接,经过选择开关的档位选择后与所述的控制器电连接;所述的转向系统与发动机通讯电路包括发动机ecm、前轮转角传感器和转向阀。
5.所述的矿用自卸卡车自动驾驶底盘线控化系统,所述的牵引与电制动控制电路包括相互并联的制动速度控制可变电阻器、制动踏板可变电阻器和油门踏板可变电阻器。
6.所述的矿用自卸卡车自动驾驶底盘线控化系统,所述的前轮角度传感器安装在前轮立轴端盖上或转向助力缸上。
7.所述的矿用自卸卡车自动驾驶底盘线控化系统,所述的举升控制电路包括举升开关、转向低压力继电器、浮动继电器和厢斗举升接近开关;
所述的转向低压力继电器的常开触点87a经过3110接头与所述的举升开关连接,所述的举升开关的三向输出分别与控制器的q20、q15、q14接线端连接,所述的举升开关经过3211接线端与与厢斗举升继电器2连接;所述的厢斗举升接近开关的输出端经3111接线端与厢斗举升继电器1连接。
8.有益效果:1.本发明矿用自卸卡车自动驾驶底盘线控化系统,是让矿用自卸卡车可以通过线控指令进行自动驾驶的装置。改造主要分为两个方面,控制改造和反馈改造。首先在控制改造方面,先将原车需要人工控制的转向阀、车斗举升系统、油门、电制动、液压制动等硬件设备,更换为可自动控制的对应设备,然后再采集原车的发动机、电控系统、胎温胎压等几个系统的数据。最终将所有设备和模拟信号控制电路接入控制器,在控制器中编程,实现协作这些设备的协同运作,最终实现将原人工驾驶的自卸卡车,改造成可自动驾驶、可反馈实时运行数据的自动驾驶的自卸卡车。
9.2.本发明能实现车辆底盘的数据采集反馈,以及从底层上实现车辆横向、纵向运动的直接控制,减少机器人操作方案所需的硬件,从而减少故障率,提高控制精度及可靠性。
10.3.本发明保持各组件的可执行状态,协调这些组件同时工作,同时采集这些组件及各传感器的反馈数据。最后用一路can总线对上位机通讯,用来将底盘反馈的数据发送给上位机,并接收、执行上位机发来的指令。
11.附图说明:附图1是本发明的原理图;附图2是本发明的牵引与电制动控制电路的电路图;附图3是本发明的档位控制电路图;附图4是本发明的卡车电控通讯电路图;附图5是本发明的举升控制电路图;附图6是本发明的发动机转速与车轮转速电路图;附图7是本发明的转向系统与发动机通讯电路图。
12.具体实施方式:实施例1:一种矿用自卸卡车自动驾驶底盘线控化系统,其组成包括:控制器、牵引与电制动控制电路、档位控制电路、卡车电控通讯电路、举升控制电路、发动机转速与车轮转速电路和转向系统与发动机通讯电路;所述的牵引与电制动控制电路、所述的档位控制电路、所述的卡车电控通讯电路、所述的举升控制电路、所述的发动机转速与车轮转速电路和所述的转向系统与发动机通讯电路分别与所述的控制器电连接;所述的档位控制电路发动机熄火开关、发动机启/停开关、选择开关、制动速度控制开关和厢斗举升过载开关,所述的制动速度控制开关和所述的厢斗举升过载开关分别与所述的选择开关电连接,经过选择开关的档位选择后与所述的控制器电连接;所述的转向系统与发动机通讯电路包括发动机ecm、前轮转角传感器和转向阀。
13.实施例2:
根据实施例1所述的矿用自卸卡车自动驾驶底盘线控化系统,所述的牵引与电制动控制电路包括相互并联的制动速度控制可变电阻器、制动踏板可变电阻器和油门踏板可变电阻器。
14.实施例3:根据实施例1或2所述的矿用自卸卡车自动驾驶底盘线控化系统,所述的前轮角度传感器安装在前轮立轴端盖上或转向助力缸上。
15.实施例4:根据实施例1或2或3所述的矿用自卸卡车自动驾驶底盘线控化系统,所述的举升控制电路包括举升开关、转向低压力继电器、浮动继电器和厢斗举升接近开关;所述的转向低压力继电器的常开触点87a经过3110接头与所述的举升开关连接,所述的举升开关的三向输出分别与控制器的q20、q15、q14接线端连接,所述的举升开关经过3211接线端与与厢斗举升继电器2连接;所述的厢斗举升接近开关的输出端经3111接线端与厢斗举升继电器1连接。
技术特征:
1.一种矿用自卸卡车自动驾驶底盘线控化系统,其特征是:其组成包括:控制器、牵引与电制动控制电路、档位控制电路、卡车电控通讯电路、举升控制电路、发动机转速与车轮转速电路和转向系统与发动机通讯电路;所述的牵引与电制动控制电路、所述的档位控制电路、所述的卡车电控通讯电路、所述的举升控制电路、所述的发动机转速与车轮转速电路和所述的转向系统与发动机通讯电路分别与所述的控制器电连接;所述的档位控制电路发动机熄火开关、发动机启/停开关、选择开关、制动速度控制开关和厢斗举升过载开关,所述的制动速度控制开关和所述的厢斗举升过载开关分别与所述的选择开关电连接,经过选择开关的档位选择后与所述的控制器电连接;所述的转向系统与发动机通讯电路包括发动机ecm、前轮转角传感器和转向阀。2.根据权利要求1所述的矿用自卸卡车自动驾驶底盘线控化系统,其特征是:所述的牵引与电制动控制电路包括相互并联的制动速度控制可变电阻器、制动踏板可变电阻器和油门踏板可变电阻器。3.根据权利要求2所述的矿用自卸卡车自动驾驶底盘线控化系统,其特征是:所述的前轮角度传感器安装在前轮立轴端盖上或转向助力缸上。4.根据权利要求3所述的矿用自卸卡车自动驾驶底盘线控化系统,其特征是:所述的举升控制电路包括举升开关、转向低压力继电器、浮动继电器和厢斗举升接近开关;所述的转向低压力继电器的常开触点87a经过3110接头与所述的举升开关连接,所述的举升开关的三向输出分别与控制器的q20、q15、q14接线端连接,所述的举升开关经过3211接线端与与厢斗举升继电器2连接;所述的厢斗举升接近开关的输出端经3111接线端与厢斗举升继电器1连接。
技术总结
矿用自卸卡车自动驾驶底盘线控化系统。通过在驾驶室加装机器人进行仿真人操作,机器人通过物理控制的方式对方向盘、油门、刹车等机构进行操作。这种方案的可靠性差、控制精度差,故障率高,而能做到直接控制的方案并没有出现。本发明组成包括:控制器、牵引与电制动控制电路、档位控制电路、卡车电控通讯电路、举升控制电路、发动机转速与车轮转速电路和转向系统与发动机通讯电路。本发明用于矿用自卸卡车自动驾驶底盘线控化。动驾驶底盘线控化。动驾驶底盘线控化。
技术研发人员:咸金龙 马广玉 赵耀忠 张波 潘博 刘强 刘跃 田文明 曹鋆程
受保护的技术使用者:华能伊敏煤电有限责任公司
技术研发日:2021.11.16
技术公布日:2022/3/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
