1.本发明涉及三轮车行走机构控制技术领域,具体是一种自助平衡防止震动干扰的控制算法。
背景技术:
2.电动三轮车具有适应性强,机动性高,维护方便,价格便宜等优点,可以轻松行驶在乡村的狭窄马路上,而广泛使用于农业领域,其中,农用三轮车的行走机构通常由一般包括电力传动系统、车架、前桥、后桥、悬挂系统和车轮等结构组成,其中,车轮结构由一对后轮和一个前轮构成,前轮作为操纵舵,用来改变方向,后轮用来驱动。
3.由于电动三轮车的稳定性和平衡控制较差,在加速、转弯等过程中,容易发生倾斜现象,同时还会产生震动现象,严重的情况下,甚至发生翻车的现象,严重影响驾驶者的体验和安全。
技术实现要素:
4.本发明的目的在于提供一种自助平衡防止震动干扰的控制算法,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种自助平衡防止震动干扰的控制算法,包括平衡控制系统和减震控制系统,所述平衡控制系统包括姿态检测模块、单片机、蓝牙模块、卡尔曼滤波器、显示器、超声波测距模块、编码器、轮毂电机、蓄电池和lqr线性二次型调节器;所述平衡控制系统和减震控制系统分别用于对三轮车的平衡状态和震动进行控制,其中,电机的一端和三轮车的轮毂传动连接,且电机的另一端与编码器连接,电机采用蓄电池供电;所述编码器用于采集电机的转速,并通过蓝牙模块传输给单片机,再单片机换算出三轮车轮毂的转速;所述姿态检测模块用于检测三轮车电机的角加速度以及三轮车车身与重力方向的倾角,且姿态检测模块包括三轴加速度计和三轴陀螺仪,其中通过加速度计获得角加速度,通过陀螺仪获得倾角;所述超声波测距模块用于测得车身与障碍物的距离,通过超声波测距模块用于对三轮车进行预警,防止三轮车撞到前方的物体;所述显示器用于显示三轮车的运行时的电压、速度、倾角、角速度以及车身与障碍物的距离;所述卡尔曼滤波器用于对陀螺仪和加速度计采集的数据进行融合滤波,从而获得较真实的姿态信息;所述蓝牙模块实现单片机与姿态检测模块、超声波测距模块之间的数据交换;所述lqr线性二次型调节器根据单片机获取的速度、角速度、倾角数据,对三轮车
进行平衡控制仿真、速度控制仿真、偏航角仿真和平衡扰动仿真,从而实现对三轮车的速度和转向进行控制。
6.作为本发明再进一步的方案:所述平衡控制系统的控制算法包括以下步骤:s1、通过编码器采集三轮车电机的转速数据,并通过蓝牙模块传输给单片机,再单片机换算出三轮车轮毂的转速;s2、通过加速度计采集三轮车电机的角加速度数据,通过陀螺仪采集三轮车车身与重力方向的倾角数据;s3、通过卡尔曼滤波器用于对陀螺仪和加速度计采集的数据进行融合滤波,从而获得三轮车真实的角加速度和倾角;s4、判断单片机是否接到指令,当没有接到指令时,直接通过lqr线性二次型调节器计算出角加速度和倾角控制量,并换算成脉冲宽度调制信号,使三轮车保持动态平衡;当单片机接到指令时,通过单片机对获得的角加速度和倾角进行分析,并通过lqr线性二次型调节器计算三轮车需要调节的控制量,并换算成脉冲宽度调制信号,从而对三轮车的速度和转向进行控制,使三轮车保持动态平衡。
7.作为本发明再进一步的方案:所述减震控制系统通过对三轮车车架进行模态分析,得出车架在各种工况下的模态特性,并计算出车架在各个模态下的固有频率,再将车架在各个模态下的固有频率与电机定子在各个模态下的固有频率进行对比,若二者数值接近,则会发生共振,通过选择合适的电机,使得二者数值尽可能离散,可以有效地减少震动,其中电机定子在各个模态下在的固有频率的计算公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
ꢀꢀꢀꢀꢀꢀꢀ
(4)当阶数=0时,=1,当阶数>0时,
ꢀꢀꢀ
(5)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)其中,为电机定子的铁芯轭部刚度,为电机定子的轭部质量,为电机定子的齿部质量,为电机定子的齿部宽度,为电机定子的铁芯平均半径,为电机定子材料的密度,为电机定子材料的弹性模量,为泊松比,为电机定子的轭部平均高度,为电机定子的铁芯的外径,为电机定子的铁芯的内径,为电机定子的叠片的有效长度,
为电机定子的模态参数,为电机定子的阶数。
8.作为本发明再进一步的方案:所述三轮车的车架的各种工况包括:在满载、常载、空车的情况下,在不同加速度、不同路段,分别在满载弯曲、满载紧急制动、满载扭转和满载爬坡的工况。
9.作为本发明再进一步的方案:所述平衡控制仿真中:将三轮车的速度参考值设置为0,三轮车的初始偏航角、速度、角速度为0,倾角初始值为0.5rad,并使三轮车姿态达到稳定;所述速度控制仿真中:将三轮车的速度参考值设置为1.6,三轮车的初始偏航角、速度、角速度、倾角为0,并使三轮车姿态达到稳定;所述倾角仿真中:将三轮车的速度参考值设置为0,速度参考值设置为1.6,偏航角给定值为,并使三轮车姿态达到稳定;所述平衡扰动仿真中:模拟三轮车在稳定状态下,受到外界干扰时的状态,三轮车的初始偏航角、速度、角速度、倾角为0,并在三轮车运行0.1s时加入0.1s的阶跃信号,观察仿真结果。
10.作为本发明再进一步的方案:所述陀螺仪的分辨率0.01
°
/sec,量程范围-300
°
/sec~300
°
/sec,零点不稳定10
°
/h,零点绝对误差
±
0.1
°
/h;所述加速度计的量程范围:-6~6g,分辨率0.01mg,偏置稳定性
±
0.01mg。
11.作为本发明再进一步的方案:所述陀螺仪通过积分的方式获得倾角,所述加速度计通过微分的方式获得倾角速度。
12.与现有技术相比,本发明的有益效果:本发明通过平衡控制系统中的姿态检测模块、单片机、超声波测距模块、蓝牙模块、编码器、卡尔曼滤波器、lqr线性二次型调节器对三轮车的速度、倾角、角速度以及车身与障碍物的距离等信息采集、分析和处理,对三轮车的速度和转向进行控制,从而使三轮车保持动态平衡,通过减震控制系统计算出车架在各个模态下的固有频率,再将车架在各个模态下的固有频率与电机定子在各个模态下的固有频率进行对比,从而使车架固有频率与电机定子固有频率尽可能离散,可以有效地减少共振现象,提高了舒适性。
附图说明
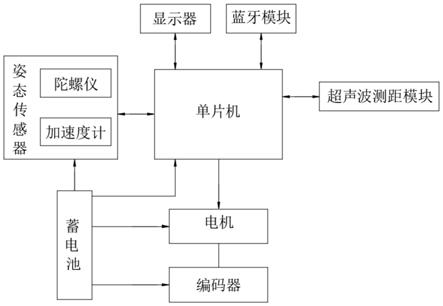
图1为一种自助平衡防止震动干扰的控制算法的结构示意图;图2为一种自助平衡防止震动干扰的控制算法的工作流程示意图。
具体实施方式
13.请参阅图1~2,本发明实施例中,一种自助平衡防止震动干扰的控制算法,包括平衡控制系统和减震控制系统,平衡控制系统包括姿态检测模块、单片机、蓝牙模块、卡尔曼滤波器、显示器、超声波测距模块、编码器、轮毂电机、蓄电池和lqr线性二次型调节器;平衡控制系统和减震控制系统分别用于对三轮车的平衡状态和震动进行控制,其中,电机的一端和三轮车的轮毂传动连接,电机的另一端与编码器连接,电机采用蓄电池供电;
编码器用于采集电机的转速,并通过蓝牙模块传输给单片机,再单片机换算出三轮车轮毂的转速;姿态检测模块用于检测三轮车电机的角加速度以及三轮车车身与重力方向的倾角,姿态检测模块包括三轴加速度计和三轴陀螺仪,其中通过加速度计获得角加速度,通过陀螺仪获得倾角;超声波测距模块用于测得车身与障碍物的距离,通过超声波测距模块用于对三轮车进行预警,防止三轮车撞到前方的物体;显示器用于显示三轮车的运行时的电压、速度、倾角、角速度以及车身与障碍物的距离;卡尔曼滤波器用于对陀螺仪和加速度计采集的数据进行融合滤波,从而获得较真实的姿态信息;蓝牙模块实现单片机与姿态检测模块、超声波测距模块之间的数据交换;lqr线性二次型调节器根据单片机获取的速度、角速度、倾角数据,对三轮车进行平衡控制仿真、速度控制仿真、偏航角仿真和平衡扰动仿真,从而实现对三轮车的速度和转向进行控制。
14.如图2所示,平衡控制系统的控制算法包括以下步骤:s1、通过编码器采集三轮车电机的转速数据,并通过蓝牙模块传输给单片机,再单片机换算出三轮车轮毂的转速;s2、通过加速度计采集三轮车电机的角加速度数据,通过陀螺仪采集三轮车车身与重力方向的倾角数据;s3、通过卡尔曼滤波器用于对陀螺仪和加速度计采集的数据进行融合滤波,从而获得三轮车真实的角加速度和倾角;s4、判断单片机是否接到指令,当没有接到指令时,直接通过lqr线性二次型调节器计算出角加速度和倾角控制量,并换算成脉冲宽度调制信号(即pwm值),使三轮车保持动态平衡;当单片机接到指令时,通过单片机对获得的角加速度和倾角进行分析,并通过lqr线性二次型调节器计算三轮车需要调节的控制量,并换算成脉冲宽度调制信号,从而对三轮车的速度和转向进行控制,使三轮车保持动态平衡,因速度分为前进速度和转向速度,前后轮速度差的大小和倾角成正比,当斜角变大,速度差也相应地变大,避免调节幅度过大将严重影响平衡,因此,需要不断地接收角加速度和倾角控制量,并连续地对速度和倾角进行调节,使得三轮车保持动态平衡,当三轮车倾斜时,重力分解成轴向力和向前力,轮毂在地面以一定的速度滚动时,产生一个与向前力方向相反的摩擦力,从而达到新的动态平衡。
15.优选的,减震控制系统通过对三轮车车架进行模态分析,得出车架在各种工况下的模态特性,并计算出车架在各个模态下的固有频率,再将车架在各个模态下的固有频率与电机定子在各个模态下的固有频率进行对比,若二者数值接近,则会发生共振,通过选择合适的电机,使得二者数值尽可能离散,可以有效地减少震动,其中电机定子在各个模态下在的固有频率的计算公式如下:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
ꢀꢀꢀꢀꢀꢀꢀ
(4)当阶数=0时,=1,当阶数>0时,
ꢀꢀꢀ
(5)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(6)其中,为电机定子的铁芯轭部刚度,为电机定子的轭部质量,为电机定子的齿部质量,为电机定子的齿部宽度,为电机定子的铁芯平均半径,为电机定子材料的密度,为电机定子材料的弹性模量,为泊松比,为电机定子的轭部平均高度,为电机定子的铁芯的外径,为电机定子的铁芯的内径,为电机定子的叠片的有效长度,为电机定子的模态参数,为电机定子的阶数。
16.优选的,三轮车的车架的各种工况包括:在满载、常载、空车的情况下,在不同加速度、不同路段,分别在满载弯曲、满载紧急制动、满载扭转和满载爬坡的工况。
17.优选的,平衡控制仿真中:将三轮车的速度参考值设置为0,三轮车的初始偏航角、速度、角速度为0,倾角初始值为0.5rad,并使三轮车姿态达到稳定;速度控制仿真中:将三轮车的速度参考值设置为1.6,三轮车的初始偏航角、速度、角速度、倾角为0,并使三轮车姿态达到稳定;倾角仿真中:将三轮车的速度参考值设置为0,速度参考值设置为1.6,偏航角给定值为,并使三轮车姿态达到稳定;平衡扰动仿真中:模拟三轮车在稳定状态下,受到外界干扰时的状态,三轮车的初始偏航角、速度、角速度、倾角为0,并在三轮车运行0.1s时加入0.1s的阶跃信号,观察仿真结果。
18.优选的,陀螺仪的分辨率0.01
°
/sec,量程范围-300
°
/sec~300
°
/sec,零点不稳定10
°
/h,零点绝对误差
±
0.1
°
/h;加速度计的量程范围:-6~6g,分辨率0.01mg,偏置稳定性
±
0.01mg。
19.优选的,陀螺仪通过积分的方式获得倾角,加速度计通过微分的方式获得倾角速度。
20.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
