1.本发明涉及植株三维建模技术领域,具体涉及一种基于三维点云的烤烟三维模型构建方法。
背景技术:
2.目前无人机在烟草生长发育的监测过程中已经得到较广范围的应用,如病虫害的监测、生长发育状况的监测等。近年来,随着各种植物表型获取手段的成熟和快速发展,以植物表型为基础的大数据体系逐渐形成。在此大环境下,更加需要进行多学科的交叉融合,探究“基因型-表型-环境”之间的关系和内在规律,进而推动农业科学的发展。
3.烟草是我国重要的经济作物,更应该注重烟草表型组学的研究。但目前烟草植物表型数据的提取多集中于烟草群体,缺乏对烟株个体的研究;而且传统研究多是通过田间测定烟株农艺性状来确定烤烟株型参数。
4.烤烟的生长发育也同样和外界环境密切相关,前人就外界环境对烤烟的影响做出过很多研究,但并非定量的探究烤烟和外界环境的互作。例如,探究烤烟冠层光分布与烤烟的关系,很多常规的方法难以对其进行深入的研究。而随着自然科学和计算机科学的发展,三维重建在植物中的应用会越来越广泛,其在烤烟株型、烤烟光合模型以及冠层光辐射中等的应用也极具价值,但目前针对烟草烤烟三维建模方面的研究还存在着很多有待解决的问题。如,魏学礼等认为应用徕卡scanstation2和vivid9i两款三维激光扫描仪对植株进行扫描时,则有叶片相互遮挡,无法顾及细节;郭焱等人采用fastscan三维激光扫描仪对烤烟植株进行扫描,但是绿叶会吸收仪器发射的红光而导致不能正常地接收返回植物信息;另外,王剑等人指出fastscan三维激光扫描仪会受到磁场的干扰而使探棒无法定位,从而影响其扫描或建模精度。
5.公开于该背景技术部分的信息仅仅旨在加深对本发明总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成本领域技术人员所公知的现有技术。
技术实现要素:
6.本发明的目的在于提供一种基于三维点云的烤烟三维模型构建方法,以解决现有技术中无法定量的探究烤烟和外界环境的互作关系的技术问题。
7.为解决上述技术问题,本发明采用如下技术方案:设计一种基于三维点云的烤烟三维模型构建方法,包括如下步骤:(1)点云数据:于无风扰动环境下,以artec eva三维扫描仪对选取的个体烟株进行三维扫描,获得烟株的点云数据;(2)点云配准:点云配准包含基于靶标的配准和基于形状的配准两种方式,即通过寻找相同的点,然后将矩阵带入数学模型中进行计算和转换,即可得到统一在同一坐标系下的坐标。如,可采用artec studio进行配准,其中包含粗略配准、精细配准和整体配准,可依照需求进行选择。
8.(3)点云去噪:由于噪点的存在会影响模型的精度,基于artec studio的离群噪点去除功能,计算点云数据之间的距离,以到点云各个点距离和最小的点作为点云中心,将离点云中心的距离超过点云半径2~3倍的点作为噪点删除。
9.(4)孔洞修补:采用基于散乱点云的孔洞修复,即先识别点云孔洞的边界,进而建立孔洞的曲面函数以实现孔洞的修复。将孔洞中最尖锐的突起点和相邻两个点建立三角区域从而实现对该区域的修补。
10.在所述步骤(1)中,以artec eva三维扫描仪扫描获取点云数据。
11.在所述步骤(1)中,扫描时仪器和扫描面保持垂直并匀速移动,且距离应在0.4~1m。
12.在所述步骤(2)中,利用软件artec studio 16.0 的配准功能对所述点云数据进行配准,点云配准包含基于靶标的配准和基于形状的配准两种方式,即通过寻找相同的点,然后将矩阵带入数学模型中进行计算和转换,即可得到统一在同一坐标系下的坐标。本发明采用artec studio进行配准,其中包含粗略配准、精细配准和整体配准,可依照需求进行选择。
13.在所述步骤(3)中,利用软件artec studio 16.0删除所述点云数据中离群噪点计算点云数据之间的距离,以到点云各个点距离和最小的点作为点云中心,将离点云中心的距离超过点云半径2~3倍的点作为噪点删除。
14.在所述步骤(4)中,利用软件artec studio 16.0中的孔修复功能对点云数据中的孔洞进行修复,采用基于散乱点云的孔洞修复,即先识别点云孔洞的边界,进而建立孔洞的曲面函数以实现孔洞的修复。将孔洞中最尖锐的突起点和相邻两个点建立三角区域从而实现对该区域的修补。
15.还包括三维扫描的精度评估步骤:在大田内手动测量株高、最大叶长和最大叶宽的人工测量值,和三维扫描仪计算出的机器测量值进行差异显著性分析和相关分析。
16.与现有技术相比,本发明的主要有益技术效果在于:1.本发明采用三维扫描仪从个体角度上对烤烟进行扫描,以获取烤烟的形态结构信息,对获取的数据进行处理从而建立烤烟的三维模型并且实现烟株的可视化,还可对三维扫描仪的精度进行评估。
17.2.本发明基于三维点云的烤烟三维模型的精度较高,且采用三维扫描仪获取点云数据的效率更高,所建立的烤烟三维模型可以很好的反映烤烟的形态特征、乃至烟叶表面的纹理特征,可为冠层光辐射、光合作用等的研究奠定了坚实的技术基础。
附图说明
18.图1为本发明实施例中三维扫描仪测量值和人工测量值的雷达图对比。
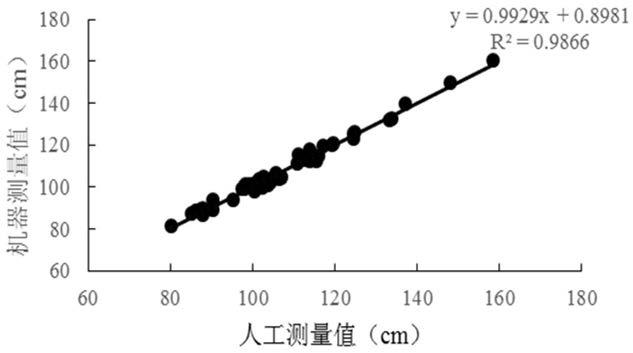
19.图2为本发明实施例中基于三维扫描仪的株高测量值和人工测量值的比较。
20.图3为本发明实施例中基于三维扫描仪的最大叶长测量值和人工测量值的比较。
21.图4为本发明实施例中基于三维扫描仪的最大叶宽测量值和人工测量值的比较。
22.图5为本发明实施例中点云预处理前(上)后(下)烤烟模型对比。
23.图6为本发明实施例中不同时期的烤烟k326三维可视化模型。
具体实施方式
24.下面结合附图和实施例来说明本发明的具体实施方式,但以下实施例只是用来详细说明本发明,并不以任何方式限制本发明的范围。
25.在以下实施例中所涉及的仪器设备如无特别说明,均为常规仪器设备;所涉及的数据处理方法,如无特别说明,均为常规方法。
26.实施例:烤烟三维模的型构建1. 试验烟株获取于2020年度在重庆市酉阳县龚滩镇进行田间烟草栽培,供试品种为当地主栽品种k326,行距1.2m,株距0.5m,试验地土壤ph4.8,有机碳含量16.81g/kg,全氮含量1.55g/kg,碱解氮含量86.74mg/kg,速效钾含量259.83mg/kg,速效磷85.07mg/kg。于2020年5月初移栽,施纯氮6kg/666.7m2,各种管理措施均与当地高产烟田的保持一致。
27.2. 烤烟三维模型的获取烤烟三维模型的获取使用美国阿泰克公司生产的artec eva三维扫描仪,为便携式的三维扫描设备,分辨率0.5mm,3d数据精度0.1mm;其为基于结构光的扫描技术,不受扫描对象颜色的影响且不受磁场干扰。
28.扫描时仪器和扫描面应保持垂直并匀速移动,且距离应在0.4~1m;需要外接电脑储存并处理数据。
29.(1)扫描精度的研究本试验采用烤烟株高、最大叶长和最大叶宽来评估三维扫描的精度。三维扫描仪对烟株进行扫描后,用仪器配套的软件对图形进行处理并读取烟株最高点和最低点位于坐标系中的坐标,计算出两点之间的距离,即为株高,而由于叶片扫描后是曲面,最大叶长及最大叶宽则用很多小的线段近似连成一个曲线得到;另一方面,用卷尺对烤烟株高、最大叶长及叶宽进行测量,将实际测量值和三维扫描仪计算出的值进行对比,从而来评估三维扫描的精确度。
30.分别将株高、最大叶长和最大叶宽的人工测量值和机器测量值进行比较,见图1,由雷达图可知,二者十分接近和吻合,于是进一步分别对株高、最大叶长以及最大叶宽的人工测量值和机器测量值的关系进行分析,由图2至图4可以看出,株高的人工测量值和机器计算值的拟合程度很好,r2为0.9866,且计算得到rmse值为1.83;最大叶长的人工测量值和机器计算值的拟合程度略逊于株高,r2为0.8602,且计算得到rmse值为3.85;最大叶宽的r2为0.8318,计算得到rmse值为2.79。最大叶长和最大叶长的拟合程度不如株高,是由于烟株在自然着生状态下是曲面,且烟叶表面有很多褶皱。
31.(2)烤烟三维模型的获取分别于移栽后50d、70d和80d,选取烟株进行三维扫描。由于扫描仪自身特点,要求外部光光强不能超过扫描仪自身的光强,且如果有强风扰动,烟株移位会造成数据的丢失,因此将烟株连根拔起放入花盆中并移至室内,及时对烟株进行扫描,为了避免等待时间过久烟株萎蔫,应拔取一株扫描一株并且适量浇水,扫描过程中应该避免烟株的移动,避免数据丢失和位置的偏移。
32.3. 模型预处理(1)原理:结构光三维扫描仪是由投影灯和信息采集镜头组成。投影灯会主动地将
光线投射到物体的表面,由于物体表面的曲率有所差别,光会发生折射和反射,从而引起光信号的变化,这些信号可以反映物体的信息,并且这些信息可以被转化为物体在三维空间里的图像。本实施例中所采用的artec eva三维扫描仪设有一个光栅发射镜头,光栅发射投影到烟株的表面,由于烟株表面不是平滑的,而是凹凸不平的,投影光栅受到了被测物体表面高度的调制;因此,光栅会产生一定程度的形变,烟株表面的信息是不同的,产生的形变和传递的信息当然也是不同的,可以通过计算光栅位置高度的变化来得到烟株表面携带的三维信息,从而得到烟株的三维模型。
33.(2)数据处理:对扫描得到的点云数据的处理步骤包括配准、删除离群噪点、孔修补等,以防止存在的误差点造成得到的三维模型有较大的偏差。
34.①
点云配准:点云配准是找到从不同角度扫描得到的点云数据之间对应关系并且将其统一在同一个坐标系的过程。点云配准可以分为基于靶标的配准和基于形状,主要就是找到相同的点,然后通过矩阵转化将其转换到同一个坐标系中。本次试验采用了三维扫描仪配套的软件artec studio 16.0 的配准功能进行配准,其中包含粗略配准、精细配准和整体配准,可以根据需要进行选择。
35.②
删除离群噪点:删除离群噪点,即点云去噪。在进行三维扫描时,由于三维扫描仪本身的误差以及操作和外界环境的不可控性,会产生一些误差噪点,这些噪点有各种各样的类型且分布也没有规律。本例利用三维扫描仪配套软件计算点云数据之间的距离,以到点云各个点距离和最小的点作为点云中心,将离点云中心的距离超过点云半径2~3倍的点作为噪点删除。检索符合条件的噪点并对其进行剔除。
36.③
孔修补:由于烟叶的相互遮挡以及烟叶表面的不规则褶皱,三维扫描仪发射的光不能被反射,从而造成数据缺失,造成点云数据存在孔洞。孔洞会让整个模型看起来不完整,并且会影响后续数据的提取,降低模型精度;因此,对孔洞的修补就显得格外重要。本例中利用配套软件,对最大的孔半径进行选择后,对符合要求的孔洞进行修复,其原理是将孔洞中最尖锐的突起点和相邻两个点建立三角区域从而实现对该区域的修补,如此循环直到孔洞被完全修复。
37.经数据处理(点云配准、点云去噪以及孔洞修补)前后的对比见图5。
38.上述所得基于三维点云的三维模型可以很好的显示烤烟植株的形态以及叶片间的相互遮挡的关系,另外在扫描获取数据的过程中使用的坐标系是不变的,因此持续建立的模型也可以一定程度上反映烟株的生长发育状况,图6是烤烟生长发育的过程示意图。
39.该烤烟三维模型的建立为其它研究奠定了基础,例如冠层光辐射、光合作用等;另外结合其它处理软件,如geomagic、matlab等可从该烤烟三维模型中提取到更多可用的信息,进行深入的研究。
40.上面结合附图和实施例对本发明作了详细的说明,但是,所属技术领域的技术人员能够理解,在不脱离本发明构思的前提下,还可以对上述实施例中的各个具体参数进行变更,或者是对相关部件、结构及材料进行等同替代,从而形成多个具体的实施例,均为本发明的常见变化范围,在此不再一一详述。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
