技术特征:
1.一种用于设计包括一个或多个梁元件的系统的计算机实施的方法,所述方法包括:经由图形用户界面接收指定系统中所包括的梁元件的用户输入;基于在沿着所述梁元件的中心线的对应点处生成的多个局部坐标系统而确定所述系统的势能,其中所述多个局部坐标系统中所包括的每个局部坐标系统均包括bishop框架;基于一个或多个运动方程和所述势能的导数而执行一个或多个计算机模拟操作以生成经更新的系统;以及渲染所述经更新的系统的至少一个表示以便经由所述图形用户界面进行显示。2.如权利要求1所述的方法,其中生成所述多个局部坐标系统中所包括的所述局部坐标系统中的一者或多者的每个局部坐标系统包括:确定所述对应点处的所述中心线的切线;确定所述对应点处的所述中心线的所述切线与前一点处的所述中心线的切线的交叉乘积的正规化;以及如果所述交叉乘积的所述正规化是零,则选择与所述前一点相关联的局部坐标系作为所述对应点处的所述局部坐标系统,或如果所述交叉乘积的所述正规化是非零,则通过基于所述对应点处的所述中心线的所述切线和所述前一点处的所述中心线的所述切线来旋转与所述前一点相关联的所述局部坐标系而生成所述局部坐标系统。3.如权利要求2所述的方法,所述方法还包括基于扭转变形而旋转所述局部坐标系。4.如权利要求1所述的方法,其中生成所述多个局部坐标系统中所包括的所述局部坐标系统中的一者或多者的每个局部坐标系统包括执行旋转技术、双反射技术或数值积分技术中的一者。5.如权利要求1所述的方法,其中使用绝对节点坐标公式来表示所述梁元件。6.如权利要求5所述的方法,其中将所述梁元件表示为两个或更多个节点,并且其中所述两个或更多个节点中所包括的每个节点均具有七个自由度。7.如权利要求1所述的方法,其中使用浮动参考系公式、增量有限元公式或大旋转矢量公式中的一者来表示所述梁元件。8.如权利要求1所述的方法,所述方法还包括:基于在沿着所述经更新的系统中的所述梁元件的中心线的对应点处生成的另外多个局部坐标系统而确定所述经更新的系统的另一势能,其中其他多个局部坐标系统中所包括的每个局部坐标系统均包括bishop框架;以及基于所述一个或多个运动方程和所述另一势能的导数而执行一个或多个计算机模拟操作以生成另一经更新的系统。9.如权利要求1所述的方法,其中所述梁元件包括不具有曲率的至少一个位置。10.如权利要求1所述的方法,其中所述系统表示建筑结构、机器人、风力涡轮机或悬架系统中的一者。11.一种或多种非暂时性计算机可读存储介质包括指令,所述指令在由至少一个处理器执行时致使所述至少一个处理器执行用于模拟包括梁元件的系统的步骤,所述步骤包括:经由图形用户界面接收指定系统中所包括的梁元件的用户输入;
基于在沿着所述梁元件的中心线的对应点处生成的多个局部坐标系统而确定所述系统的势能,其中所述多个局部坐标系统中所包括的每个局部坐标系统均包括bishop框架;基于一个或多个运动方程和所述势能的导数而执行一个或多个计算机模拟操作以生成经更新的系统;以及渲染所述经更新的系统的至少一个表示以便经由所述图形用户界面进行显示。12.如权利要求11所述的一种或多种非暂时性计算机可读存储介质,其中生成所述多个局部坐标系统中所包括的所述局部坐标系统中的一者或多者的每个局部坐标系统包括:确定所述对应点处的所述中心线的切线;确定所述对应点处的所述中心线的所述切线与前一点处的所述中心线的切线的交叉乘积的正规化;以及如果所述交叉乘积的所述正规化是零,则选择与所述前一点相关联的局部坐标系作为所述对应点处的所述局部坐标系统,或如果所述交叉乘积的所述正规化是非零,则通过基于所述对应点处的所述中心线的所述切线和所述前一点处的所述中心线的所述切线来旋转与所述前一点相关联的所述局部坐标系而生成所述局部坐标系统。13.如权利要求11所述的一种或多种非暂时性计算机可读存储介质,其中模拟所述系统包括在多个时间步长内执行动态模拟。14.如权利要求13所述的一种或多种非暂时性计算机可读存储介质,其中模拟所述系统包括执行runge-kutta技术、几何变分积分器技术或newmark技术中的一者。15.如权利要求11所述的一种或多种非暂时性计算机可读存储介质,其中模拟所述系统包括在单个时间点处执行静态模拟。16.如权利要求11所述的一种或多种非暂时性计算机可读存储介质,其中使用绝对节点坐标公式来表示所述梁元件。17.如权利要求16所述的一种或多种非暂时性计算机可读存储介质,其中所述梁元件被表示为两个或更多个节点,并且其中所述两个或更多个节点中所包括的每个节点均具有七个自由度。18.如权利要求11所述的一种或多种非暂时性计算机可读存储介质,其中所述梁元件包括具有零曲率的至少一个位置。19.如权利要求11所述的一种或多种非暂时性计算机可读存储介质,其中所述系统表示建筑结构、机器人、风力涡轮机或悬架系统中的一者。20.一种系统,所述系统包括:一个或多个存储器,所述一个或多个存储器存储指令;以及一个或多个处理器,所述一个或多个处理器耦合到所述一个或多个存储器并且在执行所述指令时被配置为:经由图形用户界面接收指定系统中所包括的梁元件的用户输入,基于在沿着所述梁元件的中心线的对应点处生成的多个局部坐标系统而确定所述系统的势能,其中所述多个局部坐标系统中所包括的每个局部坐标系统均包括bishop框架,基于一个或多个运动方程和所述势能的导数而执行一个或多个计算机模拟操作以生成经更新的系统,以及
渲染所述经更新的系统的至少一个表示以便经由所述图形用户界面进行显示。
技术总结
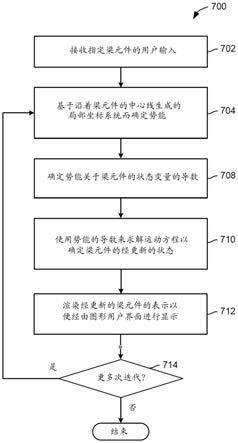
公开了用于设计使用可扭转变形的空间梁元件的结构的技术。可使用绝对节点坐标公式或任何其他技术上可行的公式来表示所述梁元件。在一个或多个时间步长中的每一者处,使用Bishop框架沿着所述梁元件的中心线生成局部坐标系统,使用所述局部坐标系统来计算所述梁元件的势能。其后,将所述势能的导数嵌入运动方程中,求解所述运动方程以确定所述梁元件的经更新的状态。还可渲染所述经更新的梁元件的表示并且经由图形用户界面显示所述表示。表示并且经由图形用户界面显示所述表示。表示并且经由图形用户界面显示所述表示。
技术研发人员:M
受保护的技术使用者:欧特克公司
技术研发日:2021.09.07
技术公布日:2022/3/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。