1.本技术涉及卫星技术领域,具体涉及一种星上时间基准校验方法、可读存储介质及卫星系统。
背景技术:
2.传统卫星基于准确的星上时间,由地面测控系统、运控系统进行系统管理,二者相对独立,这种时间管理方式不利整星平台和载荷工作协调,同时占用大量硬件资源和人力资源。而添加独立的星上校验模块的方式,又对于微小卫星的体积和重量提出新的要求,更为重要的是造成了整星可靠性的降低。
技术实现要素:
3.本技术的目的在于,提供一种星上时间基准校验方法、可读存储介质及卫星系统,依靠算法实现星上时间基准校验,能够满足微小卫星计时和校验需求,提高了整星可靠性。
4.为解决上述技术问题,本技术公开了一种星上时间校正方法,包括如下步骤:
5.根据太阳敏感器的测量数据获取太阳敏感器坐标系下的太阳矢量;
6.根据所述太阳敏感器坐标系下的太阳矢量,获取惯性系下的太阳矢量;
7.根据所述惯性系下的太阳矢量获取当前时间的理论值;
8.根据gnss模块的状态与所述当前时间的理论值校正星上时间。
9.可选地,根据所述太阳敏感器坐标系下的太阳矢量,获取惯性系下的太阳矢量,包括:
10.根据所述太阳敏感器的安装矩阵和所述太阳敏感器坐标系下的太阳矢量,计算本体系下的太阳矢量;
11.获取姿态四元数,并根据所述姿态四元数与所述本体系下的太阳矢量获取惯性系下的太阳矢量。
12.可选地,根据gnss模块的状态与所述当前时间的理论值校正星上时间的步骤,包括:
13.判断gnss模块的状态;
14.若所述gnss模块处于无效状态,则以所述当前时间的理论值校正星上时间;
15.若所述gnss模块处于有效状态,则在所述gnss模块对应的gnss时间的标志为有效标志时,将所述gnss时间与所述理论时间作差后获取时间差值;
16.在所述时间差值大于第一阈值时,以所述当前时间的理论值校正星上时间,在所述时间差值不大于所述第一阈值时,以所述gnss时间校正星上时间。
17.可选地,根据gnss模块的状态与所述当前时间的理论值校正星上时间的步骤,还包括:
18.若所述gnss模块处于有效状态,则在所述gnss模块对应的gnss时间的标志为无效标志时,以所述当前时间的理论值校正星上时间。
19.可选地,若所述gnss模块处于有效状态,则在所述gnss模块对应的gnss时间的标志为有效标志时,将所述gnss时间与所述理论时间作差后获取时间差值之后,还包括:
20.在所述时间差值大于第一阈值时,将所述gnss时间的标志设置为无效标志。
21.可选地,所述星上时间校正方法,还包括:
22.在所述时间差值小于第二阈值时,对误差次数进行累加,所述第二阈值小于所述第一阈值;
23.在所述误差次数超过预设次数时,将所述gnss时间的标志设置为有效标志。
24.可选地,根据所述惯性系下的太阳矢量获取当前时间的理论值,包括:
25.基于切比雪夫多项式关系、所述惯性系下的太阳矢量以及预存的星历表反算所述当前时间的理论值。
26.可选地,根据所述惯性系下的太阳矢量获取当前时间的理论值,包括:
27.根据所述惯性系下的太阳矢量获取太阳轨道倾角;
28.根据所述太阳轨道倾角获取当前时间的儒略世纪数;
29.根据所述儒略世纪数获取儒略日;
30.将所述儒略日转化为星上星时秒,得到当前时间的理论值。
31.本技术还提供一种可读存储介质,所述可读存储介质中存储应用程序,所述应用程序在被处理器执行时,能实现如上所述的星上时间校正方法。
32.本技术还提供一种卫星系统,所述卫星系统包括如上所述的可读存储介质。
33.本技术的星上时间基准校验方法、可读存储介质及卫星系统。该方法包括:根据太阳敏感器的测量数据获取太阳敏感器坐标系下的太阳矢量;根据太阳敏感器坐标系下的太阳矢量,获取惯性系下的太阳矢量;根据惯性系下的太阳矢量获取当前时间的理论值;根据gnss模块的状态与当前时间的理论值校正星上时间。本技术基于星上的太阳敏感器提供星上时间的第三方校验数据源,依靠算法实现星上时间基准校验,能够满足微小卫星计时和校验需求,不需要额外的星上时间基准模块,提高了整星可靠性。
附图说明
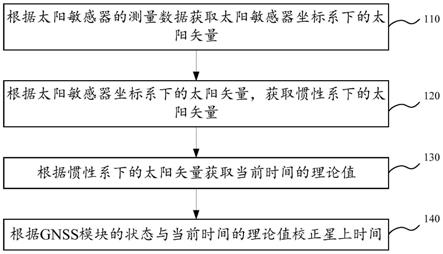
34.图1是本技术的星上时间基准校验方法的流程示意图;
35.图2是本技术的计算星上当前时间的理论值的流程图;
36.图3是本技术的星上时间基准校验方法的具体流程示意图。
具体实施方式
37.为更进一步阐述本技术为达成预定申请目的所采取的技术手段及功效,以下结合附图及较佳实施例,对依据本技术的提出的具体实施方式、方法、步骤、结构、特征及其效果进行详细说明。下面的详细描述不应该被认为是限制的,这里使用的术语及所附图示仅是为了描述特定实施例,而并非旨在限制本技术。
38.图1是本技术的星上时间基准校验方法的流程示意图。如图1所示,本技术的星上时间基准校验方法,包括以下步骤:
39.步骤110,根据太阳敏感器的测量数据获取太阳敏感器坐标系下的太阳矢量;
40.步骤120,根据太阳敏感器坐标系下的太阳矢量,获取惯性系下的太阳矢量;
41.可选地,根据太阳敏感器坐标系下的太阳矢量,获取惯性系下的太阳矢量,包括:
42.根据太阳敏感器的安装矩阵和太阳敏感器坐标系下的太阳矢量,计算本体系下的太阳矢量;
43.获取姿态四元数,并根据姿态四元数与本体系下的太阳矢量获取惯性系下的太阳矢量。
44.其中,本体系下的太阳矢量即为卫星本体系下的太阳矢量。
45.步骤130,根据惯性系下的太阳矢量获取当前时间的理论值;
46.可选地,根据惯性系下的太阳矢量获取当前时间的理论值,包括:
47.基于切比雪夫多项式关系、惯性系下的太阳矢量以及预存的星历表反算当前时间的理论值。
48.可选地,根据惯性系下的太阳矢量获取当前时间的理论值,包括:
49.根据惯性系下的太阳矢量获取太阳轨道倾角;
50.根据太阳轨道倾角获取当前时间的儒略世纪数;
51.根据儒略世纪数获取儒略日;
52.将儒略日转化为星上星时秒,得到当前时间的理论值。
53.优选地,步骤130的具体过程请参考图2,包括如下步骤:
54.步骤21:判断是否能够载入美国喷气推进实验室(jpl)发布的de系列星历表:若星上无预存星历表,跳转至步骤22;若星上预存了jpl发布的de系列星历表,跳转至步骤27;
55.步骤22:令太阳矢量表s
eci
表示为s
eci
=[x y z]
t
形式;
[0056]
步骤23:计算太阳轨道倾角i:
[0057][0058]
步骤24:根据太阳轨道倾角i,反算当前时间的儒略世纪数t:
[0059]
i=f-1
(t)=23.439302
°‑
0.013004
°
t-0.16
°
e-6
t2[0060]
步骤25:将儒略世纪数t转换为儒略日jd(t):
[0061]
jd(t)=35525t 245145.0;
[0062]
步骤26:将儒略日jd(t)转化为星上星时秒t,至此得到当前时间的理论值;
[0063]
步骤27:基于太阳矢量与协调世界时(utc时间)之间的切比雪夫多项式关系,反算当前utc时刻time:
[0064]
time=f-1
(s
eci
);
[0065]
步骤28:将utc时间time格式转化为时间秒g(time);
[0066]
步骤29:基于卫星发射前约定好的星上零时刻t0,计算星上星时秒t:
[0067]
t=g(time)-t0;至此得到当前时间的理论值。
[0068]
其中,步骤27的具体计算过程如下:
[0069]
通过jpl星历表计算eci坐标系下太阳位置算法输入只与时间有关,因此理论上可以通过反算星表中参数,然后通过查表确定当前时间。但计算过程中涉及查表参数较多,通过一次太阳矢量位置拟合出星表中参数并不实际,此处考虑使用上一次校正的时间作为初值,迭代查表(二分、随机打靶等多种方法)逼近方法。
[0070]
其中二分法具体计算流程如下:
[0071]
(1)(第一次迭代,取上一周期校正后的星上时间)t0作为初值,计算太阳矢量,计
算与本周期测量的太阳矢量误差δ0(可用多种误差表达,本处采用旋转欧拉轴角法计算两个太阳矢量的一次旋转角作为误差);
[0072]
(2)设置时间差值δt(第一次迭代,取2到3个周期),令t1=t0 δt,计算太阳矢量,计算和测量的太阳矢量的误差δ1;
[0073]
(3)若δ0》δ1,取t0=t0 δt/2;否则取t1=t
1-δt/2;至此一次迭代计算完成;
[0074]
(4)重复步骤(1)-(3),直到迭代次数达到设置上限,或者本次迭代计算的最小误差δ大于等于上一次迭代的最小误差,迭代结束取最小的误差δ对应的星表时刻作为迭代结果,也即是反算确定的校正星时。
[0075]
其中jpl星历表给出了太阳、月球和九大行星过去和将来的位置信息,并且是开放可使用的。jpl星历表在20世纪60年代由喷气推进实验室建立,最初用作行星探测导航的目的,随着观测技术的不断提高,新的观测数据不断获得,jpl星历表仍在不断修正和完善。jpl星历表为了精确的表示长时间范围内的天体位置,把长时间范围(数百年)分成短的时间区间(数天),对于每个短的时间区间,它提供一组切比雪夫插值系数,要计算某一时刻的天体位置,首先找到这个短的时间区间,得到切比雪夫插值系数,然后根据切比雪夫插值公式计算天体位置。
[0076]
某一瞬时时刻输入jpl星历表,得到ssb系下的太阳、地月二体质心的位置,得到bcrs下的月球位置,基于几何方法计算j2000下的太阳位置。
[0077]
步骤140,根据gnss模块的状态与当前时间的理论值校正星上时间。
[0078]
可选地,根据gnss模块的状态与当前时间的理论值校正星上时间的步骤,包括:
[0079]
判断gnss模块的状态;
[0080]
若gnss模块处于无效状态,则以当前时间的理论值校正星上时间;
[0081]
若gnss模块处于有效状态,则在gnss模块对应的gnss时间的标志为有效标志时,将gnss时间与理论时间作差后获取时间差值;
[0082]
在时间差值大于第一阈值时,以当前时间的理论值校正星上时间,在时间差值不大于第一阈值时,以gnss时间校正星上时间。
[0083]
可选地,根据gnss模块的状态与当前时间的理论值校正星上时间的步骤,还包括:
[0084]
若gnss模块处于有效状态,则在gnss模块对应的gnss时间的标志为无效标志时,以当前时间的理论值校正星上时间。
[0085]
可选地,若gnss模块处于有效状态,则在gnss模块对应的gnss时间的标志为有效标志时,将gnss时间与理论时间作差后获取时间差值之后,还包括:
[0086]
在时间差值大于第一阈值时,将gnss时间的标志设置为无效标志。
[0087]
可选地,星上时间校正方法,还包括:
[0088]
在时间差值小于第二阈值时,对误差次数进行累加,第二阈值小于第一阈值;
[0089]
在误差次数超过预设次数时,将gnss时间的标志设置为有效标志。
[0090]
图3是本技术的星上时间基准校验方法的具体流程示意图。请一并参考图1与图3,图3中的步骤1-5为图1中的步骤110-130的具体过程,步骤6-15为图1中步骤140的具体过程,以下基于图3对本技术的星上时间基准校验方法进行详细说明。
[0091]
步骤1:采用太阳敏感器获取测量数据,在太阳敏感器坐标系下,获取太阳矢量s
sensor
;
[0092]
步骤2:基于星上装订的太阳敏感器安装矩阵l
bs
,计算本体系下的太阳矢量s
body
:
[0093]sbody
=l
bsssensor
;
[0094]
步骤3:基于星上定姿确定的姿态四元数q
bl
,计算惯性系下的太阳矢量s
ect
:
[0095]
步骤4:基于惯性系的太阳矢量s
ecl
,反算当前时间的理论值:
[0096]
time=f-1
(s
ect
);
[0097]
步骤5:将当前时间的理论值time转化为星上星时秒计数t:
[0098]
t=g(time);
[0099]
步骤6:对gnss模块的状态进行判断:若此时gnss模块无效,或缺少gnss模块数据,跳转到步骤7;若此时gnss模块有效,跳转到步骤8;
[0100]
步骤7:以当前时间的理论值(星上星时秒计数t)校正星上星时,本周期的星上时间校正结束;
[0101]
步骤8:对gnss时间的数据有效标志进行判断:若gnss时间的数据有效标志有效,跳转到步骤9;若gnss时间的数据有效标志无效,跳转到步骤11;
[0102]
步骤9:将当前时间的理论值(星上星时秒计数t)与gnss模块时间作差;
[0103]
步骤10:判断时间差与第一阈值的关系:若时间差大于第一阈值,跳转至步骤11;若时间差小于第一阈值,跳转至步骤15;
[0104]
步骤11:将gnss时间数据的有效标志置为无效;
[0105]
步骤12:以当前时间的理论值(星上星时秒计数t)校正星上星时;
[0106]
步骤13:判断时间差连续n拍与第二阈值的关系:若时间差大于第二阈值,本周期的星上时间校正结束;若时间差小于第二阈值,跳转至步骤14;
[0107]
步骤14:重新将gnss时间的数据有效标志置为有效,本周期的星上时间校正结束;
[0108]
步骤15:以gnss时间校正星上星时,本周期的星上时间校正结束。
[0109]
本技术的星上时间基准校验方法,根据太阳敏感器的测量数据获取太阳敏感器坐标系下的太阳矢量;根据太阳敏感器坐标系下的太阳矢量,获取惯性系下的太阳矢量;根据惯性系下的太阳矢量获取当前时间的理论值;根据gnss模块的状态与当前时间的理论值校正星上时间。本技术基于星上的太阳敏感器提供星上时间的第三方校验数据源,依靠算法实现星上时间基准校验,能够满足微小卫星计时和校验需求,不需要额外的星上时间基准模块,提高了整星可靠性。
[0110]
本技术还提供一种可读存储介质,所述可读存储介质中存储应用程序,所述应用程序在被处理器执行时,能实现如上所述的星上时间校正方法。
[0111]
本技术还提供一种卫星系统,所述卫星系统包括如上所述的可读存储介质。
[0112]
上述所有实施例,仅为本技术的具体实施方式,用以说明本技术的技术方案,而非对其进行限制,本技术的保护范围并不局限于次,任何熟悉本技术领域的技术人员对前述实施例所记载的技术方案进行同等变形或替换都包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。