技术特征:
1.基于改进细菌菌落的主蒸汽温度线性自抗扰串级控制方法,其特征在于,所述控制方法的外回路采用线性自抗扰控制器,基于改进细菌菌落优化算法对线性自抗扰控制器的带宽ω
c
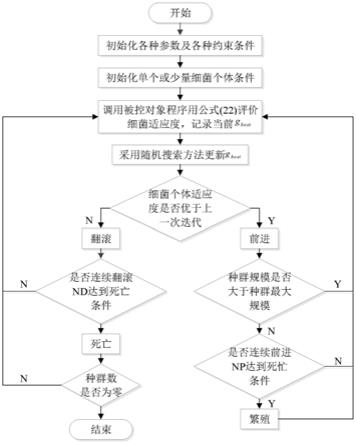
、被控对象参数b的估计值b0进行优化,包括以下步骤:步骤1,初始化算法的相关参数,设置相关约束条件,线性自抗扰控制器的两个参数看作空间中的一组可行解(ω
c
,b0);步骤2,初始化单个或3~5个细菌个体;步骤3,根据细菌个体当前位置,调用被控对象程序用公式(22)评价细菌适应度值,即计算每个细菌的目标函数值,记录当前g
best
以及(ω
c
,b0),并采用随机搜索方法,更新g
best
以及线性自抗扰控制器的两个参数(ω
c
,b0),公式(22)如下:其中,δj为δt时间段内误差函数加权之后的积分值,δt为采样周期,e为误差,τ为时间;步骤4,若当前细菌个体适应度值优于上一次细菌个体适应度值,当前细菌个体进行前进操作,用公式(15)~(17)更新位置后执行步骤5,否则,进行翻滚操作,用公式(18)更新位置后执行步骤6,公式(15)~(18)如下:v
i 1
=α[v
i
r1·
rand
·
(f
best-x
i
) r2·
rand
·
(g
best-x
i
)]
ꢀꢀꢀꢀꢀꢀ
(15)x
i 1
=v
i
v
i 1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(17)x
i 1
=x
i
r3·
randn
·
(g
best-x
i
)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(18)其中,v
i 1
为第i 1次迭代时细菌个体的运动方向;v
i
为第i次迭代时细菌个体的运动方向;x
i 1
为第i 1次迭代时细菌个体在解空间中的位置;x
i
为第i次迭代时细菌个体在解空间中的位置;f
best
为细菌个体父代所经历的最优位置;g
best
为整个菌落迄今为止所经历的最优位置;r,r1以及r2为系数;rand为(0,1)之间的随机数;步骤5,判断当前种群是否达到最大种群,是返回步骤3;否则,若连续前进np次达到死亡条件,则执行繁殖操作,然后再返回执行步骤3,若连续前进np次没有达到死亡条件,则直接返回执行步骤3;步骤6,若连续翻滚nd次达到死亡条件,则执行死亡操作,然后执行步骤7,否则返回执行步骤3;步骤7,若种群数为零,则算法结束,输出最优参数值ω
c
、b0,否则返回继续执行步骤3。2.根据权利要求1所述的基于改进细菌菌落的主蒸汽温度线性自抗扰串级控制方法,其特征在于,所述步骤1中相关参数为种群规模、繁殖条件。3.根据权利要求1所述的基于改进细菌菌落的主蒸汽温度线性自抗扰串级控制方法,其特征在于,所述步骤1中相关约束条件为:
式中,x
i 1
为第i 1次迭代时细菌个体在解空间中的位置,x
max
是细菌个体位置最大值,x
min
是细菌个体位置最小值。4.根据权利要求1所述的基于改进细菌菌落的主蒸汽温度线性自抗扰串级控制方法,其特征在于,所述步骤3中随机搜索方法为在每次迭代后,以某r
g
为半径,在最优位置附近进行k次随机搜索,改进的g
best
最优位置为:式中,k是在最优位置附近第k次随机搜索,是个体第i次迭代时最优位置第k次随机搜索,r
g
是随机搜索半径,r
i
是惯性比例,表示对当前最优位置的继承,rand
·
r
g
为搜索步长。
技术总结
本发明涉及火力发电、智能优化控制技术领域,具体涉及基于改进细菌菌落的主蒸汽温度线性自抗扰串级控制方法。本发明针对循环流化床锅炉主蒸汽温度系统存在非线性、多扰动等问题,采用串级控制与线性自抗扰控制相结合的控制策略,设计了主蒸汽温度线性自抗扰串级控制系统,同时,为了改善该系统的控制性能和控制精度,提出一种基于改进细菌菌落优化的线性自抗扰串级控制方法。该方法将ITAE积分性能指标作为改进细菌菌落算法的适应度函数,利用改进细菌菌落算法对自抗扰控制器参数进行优化。最后基于Matlab/Simulink仿真平台,搭建建主蒸汽温度的动态仿真模型。汽温度的动态仿真模型。汽温度的动态仿真模型。
技术研发人员:印江 曹振乾 侯鹏飞 张津华 白建云 袁华保峰 李丽锋
受保护的技术使用者:山西大学
技术研发日:2021.07.05
技术公布日:2022/3/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。