技术特征:
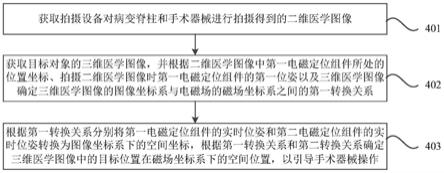
1.一种手术导航方法,其特征在于,包括:获取拍摄设备对目标对象进行拍摄得到的二维医学图像,其中,所述目标对象上固定有第一电磁定位组件,所述第一电磁定位组件位于电磁场中;获取所述目标对象的三维医学图像;根据所述二维医学图像中所述第一电磁定位组件所处的位置坐标、拍摄所述二维医学图像时所述第一电磁定位组件的第一位姿以及所述三维医学图像确定所述三维医学图像的图像坐标系与所述电磁场的磁场坐标系之间的第一转换关系;其中,所述第一位姿基于所述第一电磁定位组件在所述电磁场下产生的感应电流或感应电压确定;根据所述第一转换关系分别将所述第一电磁定位组件的实时位姿和第二电磁定位组件的实时位姿转换为所述图像坐标系下的空间坐标,以引导手术器械操作;其中,所述第二电磁定位组件固定于所述手术器械上,且所述第二电磁定位组件位于所述电磁场中;所述手术器械用于对所述目标对象进行手术操作。2.根据权利要求1所述的手术导航方法,其特征在于,确定所述图像坐标系与所述磁场坐标系之间的第一转换关系,包括:根据所述位置坐标和所述第一位姿确定所述拍摄设备的设备坐标系与所述磁场坐标系之间的第二转换关系;对所述三维医学图像和所述二维医学图像进行图像配准,根据所述图像配准的结果确定所述图像坐标系与所述设备坐标系之间的第三转换关系;根据所述第二转换关系和所述第三转换关系确定所述第一转换关系。3.根据权利要求2所述的手术导航方法,其特征在于,确定所述设备坐标系与所述磁场坐标系之间的第二转换关系,包括:根据所述位置坐标以及所述拍摄设备的投影变换矩阵确定所述第一电磁定位组件在所述设备坐标系下的第二位姿;根据所述第二位姿和所述第一位姿确定所述第二转换关系。4.根据权利要求2所述的手术导航方法,其特征在于,对所述三维医学图像和所述二维医学图像进行图像配准,包括:基于数字影像重建算法建立与所述三维医学图像对应的二维模拟图像;对所述二维模拟图像与所述二维医学图像进行图像配准。5.根据权利要求1所述的手术导航方法,其特征在于,引导所述手术器械操作,包括:根据所述第一转换关系确定所述三维医学图像中的目标位置在所述磁场坐标系下的第二空间坐标;根据所述第二电磁定位组件的当前位姿和所述第二空间坐标规划所述手术器械的移动路径;根据所述移动路径移动所述手术器械。6.一种手术导航装置,其特征在于,包括:获取模块,用于获取拍摄设备对目标对象进行拍摄得到的二维医学图像,其中,所述目标对象上固定有第一电磁定位组件,所述第一电磁定位组件位于电磁场中;所述获取模块,还用于获取所述目标对象的三维医学图像;确定模块,用于根据所述二维医学图像中所述第一电磁定位组件所处的位置坐标、拍
摄所述二维医学图像时所述第一电磁定位组件的第一位姿以及所述三维医学图像确定所述三维医学图像的图像坐标系与所述电磁场的磁场坐标系之间的第一转换关系;其中,所述第一位姿基于所述第一电磁定位组件在所述电磁场下产生的感应电流或感应电压确定;转换模块,用于根据所述第一转换关系分别将所述第一电磁定位组件的实时位姿和第二电磁定位组件的实时位姿转换为所述图像坐标系下的空间坐标,以引导手术器械操作;其中,所述第二电磁定位组件固定于所述手术器械上,且所述第二电磁定位组件位于所述电磁场中;所述手术器械用于对所述目标对象进行手术操作。7.根据权利要求6所述的手术导航装置,其特征在于,在确定所述图像坐标系与所述磁场坐标系之间的第一转换关系时,所述确定模块具体用于:根据所述位置坐标和所述第一位姿确定所述拍摄设备的设备坐标系与所述磁场坐标系之间的第二转换关系;对所述三维医学图像和所述二维医学图像进行图像配准,根据所述图像配准的结果确定所述图像坐标系与所述设备坐标系之间的第三转换关系;根据所述第二转换关系和所述第三转换关系确定所述第一转换关系。8.根据权利要求7所述的手术导航装置,其特征在于,在确定所述设备坐标系与所述磁场坐标系之间的第二转换关系时,所述确定模块用于:根据所述位置坐标以及所述拍摄设备的投影变换矩阵确定所述第一电磁定位组件在所述设备坐标系下的第二位姿;根据所述第二位姿和所述第一位姿确定所述第二转换关系。9.根据权利要求7所述的手术导航装置,其特征在于,在对所述三维医学图像和所述二维医学图像进行图像配准时,所述确定模块用于:基于数字影像重建算法建立与所述三维医学图像对应的二维模拟图像;对所述二维模拟图像与所述二维医学图像进行图像配准。10.根据权利要求6所述的手术导航装置,其特征在于,所述装置还包括:路径规划模块,用于根据所述第一转换关系确定所述三维医学图像中的目标位置在所述磁场坐标系下的第二空间坐标;并根据所述第二电磁定位组件的当前位姿和所述第二空间坐标规划所述手术器械的移动路径;驱动模块,用于根据所述移动路径移动所述手术器械。11.一种电子设备,包括存储器、控制器及存储在存储器上并可在控制器上运行的计算机程序,其特征在于,所述控制器执行所述计算机程序时实现权利要求1至5中任一项所述的手术导航方法。12.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被控制器执行时实现权利要求1至5中任一项所述的手术导航的步骤。
技术总结
本发明公开了手术导航方法、装置、电子设备、存储介质。方法包括:获取拍摄设备对目标对象进行拍摄得到的二维医学图像,目标对象上固定有第一电磁定位组件,第一电磁定位组件位于电磁场中;获取目标对象的三维医学图像;根据二维医学图像中第一电磁定位组件所处的位置坐标、拍摄二维医学图像时第一电磁定位组件的第一位姿以及三维医学图像确定三维医学图像的图像坐标系与电磁场的磁场坐标系之间的第一转换关系;根据第一转换关系分别将第一电磁定位组件的实时位姿和固定于手术器械上的第二电磁定位组件的实时位姿转换为图像坐标系下的空间坐标,以引导手术器械操作;其中,第一电磁定位组件和第二电磁定位组件均位于电磁场中,实现了手术导航。实现了手术导航。实现了手术导航。
技术研发人员:何滨 严世贵 李伟栩 童睿 郭宏瑞
受保护的技术使用者:杭州三坛医疗科技有限公司
技术研发日:2020.09.10
技术公布日:2022/3/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。