1.本发明涉及图像检测技术领域,尤其涉及一种基于信息熵的测光方法。
背景技术:
2.在c臂机成像中,辐射至平板探测器的剂量率是影响成像质量的重要因素之一。在实际的成像过程中,剂量率主要受到管电压、管电流的制约,通常采用自动调光算法,根据前一帧或前若干帧图像的测光值,实时地调整管电压、管电流。因此在一个固定的测试场景中,测光值最终决定了剂量率的大小。
3.传统的测光方法往往考虑以整帧图像的像素值均值作为最终的测光值,但是被拍摄物体并不能总是占据整帧图像;其次考虑到x光穿透物体时,因为辐射被吸收的原因,剂量率会变得更低,所以一般较低的像素值信息才代表了真正有效的信息。而且考虑到人眼更关注图像中心的特性,不考虑像素位置,得到的测光值也不能代表人眼真正的感知情况。
技术实现要素:
4.发明目的:本发明针对上述不足,提出了一种基于信息熵的测光方法,解决了在x光成像中,传统测光方法未考虑有效的测光区域往往未占据整帧图像、图像的有效信息携带在值域相对较小的像素信息中、人眼对中心区域的感知更敏感等情况,造成的测光值偏大、且实际图像不符合人眼感知等问题。
5.技术方案:
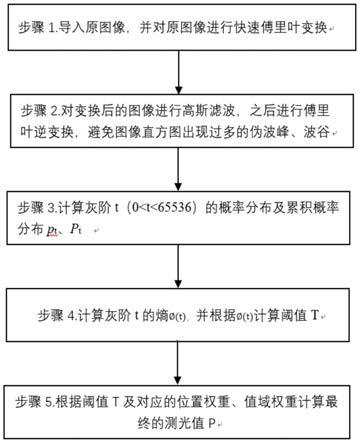
6.一种基于信息熵的测光方法,包括步骤:
7.(1)对原图像进行预处理;
8.(2)计算经步骤(1)处理后的图像上某一像素值为t的概率分布及累积概率分布;
9.(3)计算像素值t的熵,并据此计算得到图像上有效信息提取像素阈值;
10.(4)根据步骤(3)得到的图像上有效信息提取像素阈值结合图像上某像素点在图像上的位置权重及其像素值在图像上像素值值域中的值域权重,计算得到图像的测光值。
11.所述步骤(1)具体为:对原图像进行快速傅里叶变换得到频域图像,对得到的频域图像进行高斯低通滤波,并进行傅里叶逆变换得到处理后的时域图像。
12.所述高斯低通滤波的滤波器核为:
[0013][0014]
其中,(m,n)表示图像边界像素点的坐标,d(m,n)表示图像边界像素点到图像中心点的距离,d0表示截止频率。
[0015]
所述步骤(2)中,计算经步骤(1)处理后的图像上某一像素值为t的概率分布p
t
及累积概率分布p
t
具体如下:
[0016]
[0017][0018]
其中,0≤t≤max,max表示该探测器上成像的图像中得到的最大像素值;card({z
ij
=t})表示图像上像素值z
ij
为t的像素点的数量,max
x
、maxy分别表示图像行列上的像素个数。
[0019]
所述步骤(3)中,计算像素值t的熵具体为:
[0020][0021]
其中,pm表示图像上像素值为m的概率分布;
[0022]
则图像上有效信息提取像素阈值
[0023]
所述步骤(3)中,图像上某像素点(i,j)在图像上的位置权重u
ij
具体为:
[0024][0025]
其中,u1<u2<u3,r1、r2分别表示需要标定的参数;以图像中心点为圆心,分别以r1、r2为半径构建两个同心圆,形成三个位置权重的图像区域;
[0026]
则图像上该像素点(i,j)的像素值在图像上像素值值域中的值域权重v
ij
具体为:
[0027][0028]
其中,v1<v2<v3,a1、a2根据需求设定,且0《a1《a2《max。
[0029]
所述三个权重的图像区域中的权重设为u1=1、u2=2、u3=3。
[0030]
a1设为a2设为且像素点(i,j)的像素值z
ij
在图像上像素值值域中的值域权重v
ij
设为v1=1、v2=2、v3=3。
[0031]
所述所述
[0032]
所述步骤(3)中,计算图像的测光值p具体为:
[0033][0034]
其中,z
ij
≤t。
[0035]
有益效果:本发明通过对图像进行高斯低通滤波,并据此计算得到某一像素值的熵,根据计算得到的熵确定图像上有效信息提取像素阈值,从而得到了图像上真正有效的信息,进而对于测光值的计算更加准确。
附图说明
[0036]
图1为本发明的流程图。
[0037]
图2为本发明得到的处理后的时域图像建立的图像坐标体系的示意图;
[0038]
图3为本发明的位置权重示意图;
[0039]
图4为本发明的值域权重示意图。
具体实施方式
[0040]
下面结合附图和具体实施例,进一步阐明本发明。
[0041]
图1为本发明的流程图,如图1所示,本发明基于信息熵的测光方法包括如下步骤:
[0042]
(1)导入原图像img,对原图像img进行快速傅里叶变换得到频域图像为图像低通滤波做准备;
[0043]
(2)为防止滤波后的振铃干扰测光,选择对频域图像imgf做高斯低通滤波,并在滤波后进行傅里叶逆变换,将图像转换到时域,得到处理后的时域图像img
t
′
;
[0044][0045]
imgf′
=imgf*h(m,n)
[0046]
其中,imgf′
表示对频域图像imgf做高斯低通滤波得到的图像,h(m,n)表示滤波器核,表示如下:
[0047][0048]
其中,(m,n)表示图像边界像素点的坐标,d(m,n)表示图像边界像素点到图像中心点的距离,d0表示截止频率;
[0049]
(3)图2为本发明的处理后的时域图像建立的图像坐标体系的示意图,以处理后的时域图像中心点为坐标原点建立二维坐标系,图中(i,j,z
ij
,u
ij
,v
ij
)表示坐标点(i,j)处的像素值为z
ij
,位置权重为u
ij
,值域权重为v
ij
;
[0050]
则计算步骤(2)得到的时域图像img
t
′
上像素值z
ij
为t的概率分布p
t
及累积概率分布p
t
,其中,t∈img
t
′
,0≤t≤max,max表示该探测器上成像的图像中得到的最大像素值;
[0051][0052][0053]
其中,card({z
ij
=t})表示像素值z
ij
=t的像素点的数量,max
x
、maxy分别表示时域图像img
t
′
行列上的像素个数;
[0054]
(4)计算像素值t的熵并根据熵计算得到图像上有效信息的提取像素阈值t;
[0055][0056]
[0057]
其中,pm表示时域图像img
t
′
上像素值为m的概率分布;
[0058]
(5)计算像素点(i,j)在图像上的位置权重u
ij
和其像素值z
ij
在图像上像素值值域中的值域权重v
ij
,如图3、4所示,并根据最终的权重计算该图像的测光值p:
[0059][0060][0061][0062]
其中,r1、r2分别表示需要标定的参数;以图像中心点为圆心,分别以r1、r2为半径构建两个同心圆,从而形成三个位置权重的图像区域;a1、a2根据需求设定,且0《a1《a2《max;
[0063]
本发明中,
[0064]
在本发明中,三个权重的图像区域中的权重满足u1<u2<u3即可,可以设为u1=1、u2=2、u3=3。
[0065]
在本发明中,a1可以设为a2可以设为
[0066]
在本发明中,像素点(i,j)的像素值z
ij
在图像上像素值值域中的值域权重v
ij
满足v1<v2<v3即可,可以设为v1=1、v2=2、v3=3。
[0067]
本发明可以得到图像上真正有效的信息,对于测光值的计算也更加准确。
[0068]
以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。