1.本发明涉及互联网地理信息技术领域,具体涉及一种实现街景地图可控行进显示全景计算机系统。
背景技术:
2.建立在电子地图基础之上,集成海量全景图像的街景地图,已经成为一种新的、开放的地理空间数据资源。全景图像的采集方式主要是全景图像采集车沿街道匀速行进,每隔一定距离拍摄一张全景图像及其经纬度坐标,互联网地理信息服务平台提供商为电子地图、全景图像开发利用提供开放平台,如免费提供android、ios、web开发开放平台,以实现电子地图、全景图像的调用与显示,构建功能丰富、交互性强的电子地图应用。街景地图中的全景图像,是沿着行进路线自动采集的,但是依托现有互联网街景地图,如“地球在线街景地图”或国内外知名街景地图服务商,需要完全依赖人工在电子地图上反复操作,通过人机交互在电子地图某路段上不断移动鼠标重复操作查询获取多个全景图像,犹如“单发点射”,形象地说是“打一枪换一个地方”,人工操作的定位位置随意性强、重复难度较大问题突出,或者在全景图像视窗内不断移动鼠标重复操作方向箭头获取前方全景图像,长时间人工操作工作效率下降较大问题突出;针对上述问题,“一种实现街景视图展示的方法及装置”(申请号:201410457789.3,专利授权公告号cn 104199944 b)进行了有益探索,其采取预先生成各路段沿道路行进方向的视野角度范围内的部分全景图像拼接成动态图像,根据接收的起点、终点坐标,生成动态图像自动播放,这在解决了现有技术中人工操作较为多的问题,并获得动态图像自动播放的快捷优势的同时,需要增加一定规模的服务器图像存储负担,自动播放的缺点是犹如“喀秋莎火箭炮”,一经启动无法再实施人工干预调整;另外,“一种实现电子地图沿线展示全景图像计算机系统”(申请号: 2019104154393,专利授权公告号: cn 110110248 b)也进行了有益探索,通过顺序接收一系列点的经纬度坐标,形成一个有行进方向的折线来表示电子地图上设定线路,在折线内,按照一定间隔沿行进方向自动顺序提取并显示多个全景图像,实现电子地图的全景图像逐一提取定向显示,解决了在电子地图某一个划定路段自动提取、定向显示多个全景图像问题,改变了街景地图的全景图像人工操作逐一提取显示方式,减少了人机交互动作次数,提高了定向显示某一划定线路内多个全景图像的工作效率,但缺点也是犹如“喀秋莎火箭炮”,一经启动无法再实施人工干预调整;总之,需要本领域技术人员迫切解决的一个技术问题,就是如何能够在上述现有街景地图纯手工模拟“单发点射”浏览全景图像技术方案与如上述两个发明专利所针对特定线路全自动沿线模拟自动巡航驾驶“喀秋莎火箭炮”播放全景图像技术方案之间,寻求一个折中的半自动可控制的浏览全景图像技术方案,即在基于电子地图之上的全景图像集合的街景地图环境下,通过控制一个地理行进初始点位、行进方向,按照设置的行进间距、时间间隔,沿着所述行进方向,模拟驾驶基本动作,操控启动、停止、转向等动作,自动行进、顺序提取并逐一显示多个全景图像,实现一种街景地图半自动模拟人工驾驶,实施可以人工干预的半自动行进查询显示全景图像技术方案,形象地说,即在“单发点射”之间嵌入了“喀秋莎火箭炮”,本技术方案一方面解决了传统人工在电子地图沿路线提取显示多个全景图像,需要反复人机交互来定位显示全景图像的问题,提高了沿路线显示多个全景图像的工作效率,另一方面,不需要输入一个特定、行进过程中不可控制的一段设定线路,输入量相对减少了许多,同时增加了查询的地理定位过程的可控度,即实现“人工驾驶”,本技术方案的操控部分的简洁更接近上述现有街景地图纯手工技术方案,本技术方案的输出的动画效果,连续行走阶段类似“一种实现电子地图沿线展示全景图像计算机系统
”ꢀ
(申请号: 2019104154393)的全自动巡航驾驶播放全景图像。
技术实现要素:
3.本发明所要解决的技术问题是提供一种实现街景地图可控行进显示全景计算机系统,在终端屏幕内设置一个全景图像视窗,一组控制操作入口,电子地图视窗作为可选项,根据需要开启电子地图视窗或关闭电子地图视窗,控制操作入口包括手控操作入口、程序操作入口,操作包括转向、停止、启动、定位、重放,所述控制操作入口的形式包括按钮、全景图像人机交互、电子地图人机交互、编辑框、列表选项、语音识别、眼球识别、程序设定,通过创立一个带有初始点位、一个行进方向、一个表示地理空间距离间隔的行进间距和一个表示行进快慢的时间间隔作为行进参数的街景地图可控行进数据结构,设置一个行进状态模式参数,并进行初始化设置、赋初值,实施街景地图可控行进显示全景的起始状态构建;首先进入行进状态模式判别模块,行进状态模式判别,如果是行进暂停状态模式、则进入行进起始状态调整模块,如果监测到启动操作指令触发则响应进入行进起始状态显示模块,如按照监测到控制操作入口的模拟驾驶操作的操作载体触发,响应参数数值调整、实施对应行进状态调整,如转向、快进、慢进、回溯、反向行进、停止、启动、重放操作,实施街景地图可控行进显示全景的起始状态调整,如果是行进自动状态模式、则直接进入行进起始状态显示模块;在完成行进状态调整之后,就是执行行进起始状态显示模块,如果初始点位上有全景图像则按照所述时间间隔延时显示全景图像,如电子地图视窗打开、则按照所显示的全景图像经纬度坐标在电子地图上标注,实施街景地图可控行进显示全景的起始状态的显示;显示之后,就是获取行进一步点位模块,将所述初始点位作为起点,沿着所述行进方向,按照所述空间距离间隔,计算出下一个新的点位,作为下一次使用的初始点位,实施街景地图可控行进显示全景的起始状态的设置;最后是行进循环控制模块,通过监测停止操作控件是否触发实施结束操控,通过监测控制操作入口的其它模拟驾驶操作的操作载体是否触发,判别是直接跳转到行进起始状态显示模块继续循环,还是跳转到行进起始状态调整模块,总之,通过构建一个街景地图可控行进显示全景的起始状态模型实体,采用一套模拟人工驾驶的转向、快进、慢进、回溯、反向行进、停止、启动、定位和视频播放的重放操作,操作形式与街景地图人机交互拖动全景图像、点击电子地图和视频播放人机交互点击按钮类似,实现调整起始状态的可控操作镶嵌在一组自动提取、延时显示全景图像、自动行进过程中,程序始终围绕所构建的起始状态模型对象实体,经过起始状态的构建与初始化、调整、显示、行进、监测、循环步骤,实现在可控状态下完成自动行进、自动提取、延时显示全景图像,循环往复任务,达到提高全景图像提取工作效率、减少人机交互工作量“半自动”目标,综上,在街景地图环境下,实现模拟人工操控驾驶、虚拟观光浏览目的。
4.为实现上述目的,本发明公开了一种实现街景地图可控行进显示全景计算机系
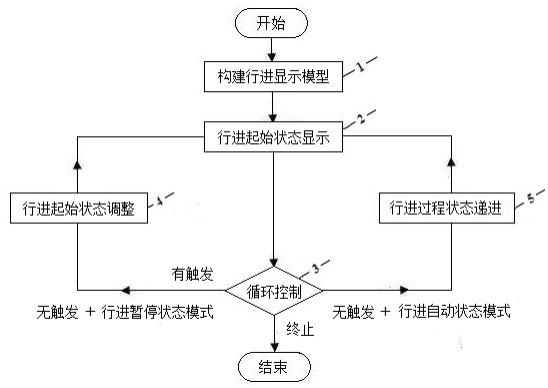
统,包括存储器、处理器、显示器、互联网、电子地图、全景图像,以及存储在存储器上并可在处理器上运行的计算机程序,在程序内首先进行初始化设置,在终端显示器屏幕s100中,开设一个全景图像窗口s110,在全景图像窗口内实例化一个全景图像并命名为全景图像视窗s111,用于显示全景图像,如图2所示,显示全景图像进一步包括,开设一个电子地图窗口s120,在电子地图窗口内实例化一个电子地图并命名为电子地图视窗s121,在电子地图上显示全景图像的地理位置标注、定位操作入口,如图3所示,开设控制操作入口,包括手控操作入口、程序操作入口,模拟驾驶操控动作包括转向、启动、停止基本操作,还进一步包括定位、重放、快进、慢进、回溯、反向行进、行进参数调整辅助操作,以及行进参数调整,所述操作入口形式包括按钮、全景图像人机交互、电子地图人机交互、编辑框、列表选项、语音识别、眼球识别、程序设定,需要说明的是,本发明对全景图像窗口和电子地图窗口在终端屏幕内如何分布、是否铺满,操作入口形式及放置在屏幕的位置,电子地图窗口显示与关闭,不做限制,对实现通过人工操作控制一个包括地理行进初始点位、行进方向、行进间距、行进快慢的行进状态构建,按照行进一步算法,行进循环控制,实现沿线路、自动提取、顺序延时、逐一显示全景图像,通过监测控制操作入口内操作载体触发,模拟驾驶操控动作响应行进状态调整,其特征在于,所述处理器执行所述程序时实现以下步骤:步骤一:构建行进显示模型,构建街景地图可控行进显示全景的起始状态,包括设置一个数据结构,街景地图可控行进数据结构内的行进参数包括,初始点位、行进方向、行进间距、时间间隔,赋初始值,设置行进状态模式,进入步骤二;(需要说明的是,本发明对初始点位存储内容具体是一组经纬度数值,或是一个字符串,或是一个全景图像id,不加以限制)步骤二:行进起始状态显示,显示街景地图可控行进显示全景的起始状态,包括初始点位全景图像显示,进入步骤三;步骤三:行进循环控制,监测模拟驾驶操作的操作载体的控制操作入口是否有触发,所述模拟驾驶操作包括启动操作、转向操作、停止操作,如果有、则进一步判断是否是终止操作,如果是则结束、否则跳转至步骤四,如果未监测到触发、则进一步判断行进状态模式,如果是行进暂停状态模式、则跳转至步骤四,如果是行进自动状态模式、则跳转至步骤五,结束;需要说明的是,所述控制操作入口位置,在全景图像视窗和电子地图视窗之外,在全景图像视窗之上或之内,在电子地图视窗之上或之内,不做限制,一个用户界面至少具有一个所述控制操作入口;步骤四:行进起始状态调整,调整街景地图可控行进显示全景的起始状态,包括激活所监测到的模拟驾驶操作,对应操作响应,进入步骤二;步骤五:行进过程状态递进,更新街景地图可控行进显示全景的起始状态,按照所述时间间隔进行延时操作,还包括按照行进一步算法,基于所述初始点位,沿着所述行进方向、所述行进间距,取得下一个兴趣点位作为将要显示的初始点位,所述行进一步算法进一步包括,全景图像id编码算法,全景图像地理坐标算法,进入步骤二;需要说明的是,实际程序所使用的算法,可以使用id编码算法或者地理坐标算法,也可两者融合使用。
5.优先的,步骤一中所述设置一个数据结构还包括,构成形式,所述构成形式进一步包括,若干个变量,或者是设置一个包括若干个属性的对象,或者是设置一个包括若干个记录的一维数组,或者兼而有之。
6.优先的,步骤一中所述初始点位还包括,存储内容,所述存储内容进一步包括,所述初始点位上一个全景图像id,或者对应一组地理经纬度坐标数值,或者所述初始点位上一个全景图像id和对应一组地理经纬度坐标数值。需要说明的是,在街景地图中,全景图像的显示是依据其自身id,数据库中每一个全景图像,具有唯一id和一组经纬度坐标值,如果电子地图上一个地理空间点位上标注有全景图像,那么按照该地理空间点位的经纬度坐标值可以检索到全景图像id,或者以该地理空间点位的经纬度坐标值为中心,在一定距离范围内可以检索到全景图像id,反之,通过全景图像id,也可以检索到其地理空间的经纬度坐标值,存储冗余度大则检索操作减少,反之,存储冗余度小则检索操作增大,各有利弊。
7.优先的,步骤一中所述行进方向还包括,在水平面上,以所述初始点位为起点到下一步兴趣点位连线的有向线段,与地理正北方向顺时针或逆时针夹角,夹角取值范围为0至360度。
8.优先的,步骤一中所述行进间距还包括,行进中前后相邻两点间全景图像采集点数或地理空间距离,行进中前后相邻两点间地理空间距离进一步包括,以所述初始点位为起点、下一步兴趣点位为终点的有向线段的长度,单位包括起点与终点两点间全景图像采集点数计数单位或地理空间距离长度测量单位,通过动态调整所述行进间距数值,实现模拟驾驶操作的辅助动作,辅助动作进一步包括,快进操作、慢进操作、回溯操作、反向行进操作,使用m1表示所述行进间距的初始值,m2表示在程序运行过程中调整后所述行进间距的新值,如果m2大于m1、则实现快进操作,如果m2小于m1、则实现慢进操作,如果m2等于-m1、则实现回溯操作,如果m2小于0、则实现反向行进操作。需要说明的是,本发明的技术方案的快进操作、慢进操作、回溯操作、反向行进操作,是模拟驾驶操作的辅助动作,借鉴手动档汽车驾驶的换档、倒档操作,回溯操作是借鉴其它编辑软件的基本操作,即撤消操作,是街景地图中的首创。
9.优先的,步骤一中所述赋初始值还包括,由程序内部赋值,或者从数据库中读取,或者程序载体如果是网页,则从网页地址参数变量href内的内容中读取。需要说明的是,本发明对网页地址参数变量href内的内容编码的具体方式方法不加以限制。
10.优先的,步骤二中所述初始点位全景图像显示还包括,在程序运行后首次显示、在程序运行后非首次显示,在程序运行后首次显示进一步包括,在程序运行后首次显示、在程序运行后非首次显示,在程序运行后首次显示进一步包括,定向显示、定向 定位显示,定向显示进一步包括,在全景图像视窗内,按照所述初始点位上的全景图像id显示全景图像,其水平视角=所述行进方向 调整角度h,h的取值范围0度至360度,定位显示进一步包括,在电子地图视窗的电子地图上,按照所述初始点位的经纬度坐标显示标注,在程序运行后非首次显示进一步包括,首先判断当前所述行进参数中至少有一项数值与最近一次所使用过的行进参数的数值有无变化,如果有则按照当前行进参数的数值执行程序运行后首次显示。
11.优先的,步骤三中所述模拟驾驶操作还包括,操作载体、事件名称、事件处理函数、绑定、监测、触发、激活、响应,触发还包括,按钮点击、滑动条滚动、全景图像包括视角、内容的变化、电子地图人机交互、编辑框录入、列表选项、语音识别、眼球识别、程序设定边界条件,在操作载体中,加载一个包括事件名称、事件处理函数,与一事件即控制操作入口绑定,在程序运行时,如监测到所加载绑定事件的触发,则激活事件处理函数,获取事件的动态数据,执行事件处理函数进行响应。需要说明的是,本发明的模拟驾驶操作是通过在街景地图
中,引入汽车驾驶的启动、停止、转向等概念,与包括全景图像视窗、电子地图视窗、按钮中的包括全景图像视角变化、电子地图鼠标单击、按钮点击事件绑定,在全景图像显示、自动行进过程中,如监测到人机交互触发所加载绑定事件,则激活全景图像对应的启动、停止、转向等操作,实现可控行进显示全景,达到虚拟观光目的,属首创。
12.优先的,步骤三中所述操作载体还包括,标准控件、程序定义的对象,设置操作载体的一事件或程序定义的边界条件为所述操作载体的控制操作入口,控制操作入口包括手控操作入口、程序操作入口,操作载体是由一个包括全景图像视窗、电子地图视窗、按钮、滑动条、编辑框、列表、选项、语音器、眼球识别器、程序代码构成的对象或函数。
13.优先的,步骤三中所述启动操作还包括,操作载体、事件名称、事件处理函数、绑定、监测、触发、激活、响应,操作载体包括,全景图像视窗、按钮、语音器,响应包括,全景图像视角变化响应、按钮响应、语音响应,全景图像视角变化响应进一步包括,在全景图像视窗的全景图像上,鼠标或屏幕触发拖动全景图像向上竖直转向,从全景图像视角变化触发事件中,获得当前全景图像竖直视角数值,按照设置的一个竖直视角数值范围,对应启动行进自动递进操作响应,按钮响应进一步包括,触发启动按钮或滑动条后,对应启动行进自动递进操作响应,语音响应进一步包括,根据语音识别特定词汇,对应启动行进自动递进操作响应,操作响应之后,程序处于行进自动状态。需要说明的是,实际程序界面的所述手控启动的操作载体,不是全部使用,而是根据实际,使用其中一种或几种形式,本技术方案中的竖直视角数值范围为启动设置,是根据人工驾车常识,踩刹车,车尾向上仰、车头向下沉,飞机起飞机头拉起、反之即反,因此,竖直视角选择以0度为界,即水平为界,0度以上为启动标识,0度以下为暂停标识,符合人机工程学原理。
14.优先的,步骤三中所述转向操作还包括,操作载体、事件名称、事件处理函数、绑定、监测、触发、激活、响应,操作载体包括,全景图像视窗、按钮、语音器,响应进一步包括,全景图像视角变化响应、按钮响应、语音响应,全景图像视角变化响应进一步包括,在全景图像视窗的全景图像上,鼠标或屏幕触发拖动全景图像左、右水平转动,从全景图像视角变化触发事件中,获得当前全景图像水平视角数值,对应转向行进方向操作响应,按钮响应进一步包括,触发左转按钮或右转按钮或滑动条后,获得当前全景图像水平视角数值,对应转向行进方向操作响应,语音响应进一步包括,根据语音识别特定词汇,获得当前全景图像水平视角数值,对应转向行进方向操作响应,操作响应进一步包括,仅进行全景图像水平视角通过增加或减少实现左转或右转调整显示操作,实现全景图像显示不同方位,或者全景图像水平视角与所述行进方向同步调整、全景图像同步转向,实现在街道交叉口拐弯或道路调整方向,操作响应之后,行进状态模式不变。需要说明的是,实际程序界面的所述转向操作的操作载体,不是全部使用,而是根据实际,使用其中一种或几种形式。
15.优先的,步骤三中所述停止操作还包括,操作载体、事件名称、事件处理函数、绑定、监测、触发、激活、响应,操作载体进一步包括,全景图像视窗、按钮、语音器,所述停止操作还进一步包括,暂停操作、终止操作,暂停操作进一步包括,自动循环停止,所述构建行进显示模型中的数据不变,操作响应之后,程序处于行进暂停状态,终止操作进一步包括,自动循环停止,对所述构建行进显示模型中的内容,包括初始点位、行进方向、行进间距、时间间隔赋初始值,设置行进状态模式为行进暂停状态模式,程序处于行进起始状态,响应进一步包括,全景图像视角变化响应、按钮响应、语音响应,全景图像视角变化响应进一步包括,
在全景图像视窗的全景图像上,鼠标或屏幕触发拖动全景图像向下竖直转向,从全景图像视角变化触发事件中,获得当前全景图像竖直视角数值,按照设置的一个竖直视角数值范围、对应停止操作响应,按钮响应进一步包括,触发停止按钮或滑动条后、对应停止操作响应,语音响应进一步包括,根据语音识别特定词汇、对应停止操作响应。需要说明的是,实际程序界面的所述停止操作的操作载体,不是全部使用,而是根据实际,使用其中一种或几种形式。
16.优先的,步骤四中所述操作响应还包括,基本操作响应、辅助操作响应,基本操作响应进一步包括,启动操作响应、转向操作响应、停止操作响应,辅助操作响应进一步包括,定位操作响应、重放操作响应、行进参数调整操作响应,。
17.优先的,定位操作还包括,操作载体、事件名称、事件处理函数、绑定、监测、触发、激活、响应,操作载体进一步包括,全景图像视窗、电子地图视窗、按钮、语音器,触发进一步包括,激活包括全景图像移动触发事件、电子地图定位触发事件、按钮点击、语音处理,响应进一步包括,电子地图定位响应、字符串空间查询定位响应、全景图像自行进定位响应,电子地图定位响应进一步包括,在电子地图视窗的电子地图上,鼠标或屏幕触发电子地图后,从电子地图点击触发事件中,获得当前点位的经纬度坐标数值,对应定位操作响应,字符串空间查询定位响应进一步包括,根据查询编辑框内所输入的字符串,通过查询按钮触发,获取所述字符串的空间经纬度坐标数值,对应定位操作响应,全景图像自行进定位响应进一步包括,在全景图像视窗的全景图像上,鼠标或屏幕触发全景图像上的移动标识,从全景图像变换触发事件中,获得当前全景图像的空间经纬度坐标数值,对应定位操作响应,操作响应进一步包括,仅进行全景图像更新调整显示操作,或者全景图像与所述初始点位同步调整,即在全景图像视窗更新全景图像、在电子地图视窗的电子地图上更新所述初始点位的地理位置显示标注,操作响应之后,行进状态模式不变。需要说明的是,实际程序界面的所述定位操作的操作载体,不是全部使用,而是根据实际,使用其中一种或几种形式。
18.优先的,重放操作还包括,操作载体、事件名称、事件处理函数、绑定、监测、触发、激活、响应,操作载体进一步包括,程序编码、按钮、语音器,触发进一步包括,激活操作载体的一触发事件,加载程序设定的一函数或对象,响应进一步包括,对所述构建行进显示模型中的内容,包括初始点位、行进方向、行进间距、时间间隔赋初始值,设置行进状态模式为行进自动状态模式,跳转至步骤二,操作响应之后,程序处于行进自动状态。
19.优先的,行进参数调整操作还包括,操作载体、事件处理函数、监测触发、激活响应,操作载体进一步包括,按钮、滑动条、编辑框、列表、选项,行进参数进一步包括,行进方向、行进间距、时间间隔。
20.优先的,行进参数调整操作响应还包括,快进操作响应、慢进操作响应、回溯操作响应、反向行进操作响应,快进操作响应、慢进操作响应进一步包括,通过包括行进间距、时间间隔参数的调整实现行进节奏加快操作响应、减慢操作响应,反向行进操作响应进一步包括,通过包括行进间距、行进方向参数的调整实现行进调头操作响应,操作响应之后,行进状态模式不变。需要说明的是,本发明技术方案,模拟驾驶操控动作包括转向、启动、停止基本操作,还进一步包括模拟手动档驾驶的换档、倒车等辅助操作,模拟视频播放的重放、快进、后退等辅助操作,辅助操作进一步包括,定位、重放、快进、慢进、回溯、反向行进,除定位操作外属街景地图操作中首创。
21.优先的,步骤五中所述全景图像id编码算法还包括,依据所述初始点位的全景图像id,沿着所述行进方向、行进间距与全景图像采集点关系,按照全景图像id街道线路编码规则,获取行进一步兴趣点位上全景图像id,全景图像id街道线路编码规则进一步包括,在一个全景图像的id内,包括所在道路编码,与前后相邻全景图像有顺序关系编码。需要说明的是,全景图像采集间距是统一数值,实际程序所使用的算法,可以使用id编码算法或者地理坐标算法,也可两者融合使用。
22.优先的,步骤五中所述全景图像地理坐标算法还包括,基于所述初始点位的地理经纬度坐标,沿着所述行进方向、所述行进间距,计算出或者从所述初始点位所在道路的经纬度数据中提取出下一个兴趣点位的地理经纬度坐标,如图4所示。需要说明的是,实际程序所使用的算法,可以使用id编码算法或者地理坐标算法,也可两者融合使用。
23.本发明的有益效果是:对于本发明在基于电子地图之上的全景图像集合环境下,通过控制一个地理行进起始点、行进方向,按照设置的行进间距、时间间隔,沿着所述行进方向,模拟驾驶的转向、启动、停止、定位、重放等操控动作,人机交互操控行进路线、自动顺序提取、逐个显示全景图像,实现一种在基于电子地图之上的全景图像集合环境下,模拟人工驾驶半自动虚拟观光浏览,即在原有“单发点射”式的操控起始状态之间穿插进行“喀秋莎火箭炮”式连续行进、自动播放全景图像,达到行进查询全景图像可控的“人工模拟驾驶”目的,具体有益效果有以下3个方面,一是将游戏界面中的模拟汽车驾驶浏览风景、视频播放按钮控制引入到街景地图查询全景图像,首创街景地图模拟手动驾驶浏览全景图像方式,为枯燥的地理空间属性查询提供了一个带有趣味性、高效率的查询方式;二是与现有街景地图纯手工模拟“单发点射”查询全景图像相比,全景图像提取效率显著提高,重复定位再现全景图像的难度大大降低,减少了在电子地图上人机交互选择点位的操作次数,同时提高了沿线路所提取的全景图像间距的均匀性,避免了电子地图上人机交互“单发点射”选择点位间距的随意性、不可控性、还原性差的问题;三是与现有街景地图全自动模拟自动驾驶巡航“喀秋莎火箭炮”展示全景图像相比,具有更加的灵活性和可控性,避免了全景图像全自动播放展示过程中,不能随意改变行进路线的不受控制的弊端,同时不需要输入一个特定一段设定线路,输入量相对减少了许多。从用户角度讲,本技术方案通过模拟人工驾驶汽车浏览沿途风景,采用操控启动、停止、转向等模拟驾驶操作,实现可控行进、自动提取全景图像,达到虚拟观光浏览效果,将街景地图传统人机交互查询带到一个全新的人机交互模拟驾驶、虚拟观光浏览的场景中。
附图说明
24.图1为本发明的街景地图可控行进显示全景的计算机程序流程图。
25.图2为本发明屏幕界面设计之一示意图。
26.图3 为本发明屏幕界面设计之二示意图。
27.图4为本发明的行进一步算法的地理坐标算法示意图。
具体实施方式
28.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图,通过以下2个实施例具体说明,对本发明作进一步详细的说明。
29.实施例1,作为本发明的实施例1,如图1所示,示出了本发明实现一种实现街景地图可控行进显示全景计算机系统的程序流程图,构建行进显示模型对象实例,是通过使用一组变量形成一个街景地图可控行进数据结构,并赋初始值实现的,编程语言使用javascript脚本语言,基于html5及css3,全景图像及相应开发工具使用在某市某专业管理部门的业务系统基础上派生出的一个“微型街景地图实验系统”中配置的全景图像和相应的javascriptapi,该系统采用b/s结构,该系统中的全景图像是通过单个2000万像素6 1个头的专业全景相机,根据工作需要在选定线路拍摄的三维实景共n个全景图像,每个全景图像数据包括其拍摄地点经纬度坐标、id码属性数据和图像数据,数据库、全景图像数据和应用程序布设在服务器中,全景图像属性数据存储在一个包括id、经度、纬度3个字段的数据库中的全景图像属性数据表内,从第0条记录开始至n-1条记录存储所拍摄的n个全景图像的属性数据,全景图像采集是在相邻的几个街区内的街道上每隔约30米,人工采集一个全景图像,按照9位地区码 4位道路码 4位门牌码 3位路口关联码 1位特征码的21位的专用全景图像id街道线路编码规则,设置每一个全景图像id,其经纬度坐标数值为全景图像采集点经纬度坐标数值,为了道路交叉路口转向变道操作的检索方便,简化数据结构,采用增加存储数据冗余度方式解决,每个道路交叉路口设置一个3位路口关联码,即在每个q条道路交叉路口,实际只采集一个设置全景图像,而实际存储q个全景图像,按照交叉路口道路数量q,复制q-1个全景图像追加到所述全景图像属性数据表内,复制的全景图像id中3位路口关联码、其经纬度与被复制的全景图像id的对应数据相同,交叉路口中的各个全景图像的id的门牌码为差值取得、特征码标识为道路交叉路口标识,实施例1以一个名为panodriveshow.html互联网网页s100作为载体,在页面中使用《script type='text/javascript' src='gpanotjw.js'》《/script》初始化链接全景图像功能库,在屏幕s100中,具体使用《div 》标签创建并命名为一个全景图像窗口区块s110,具体使用var s111=new gpanooptions(“s110”,“服务器存储全景图像路径”,“id”) ,为在全景图像窗口区块s110内实例化一个全景图像视窗,作为全景图像显示载体和模拟驾驶操作的操作载体,将s111全景图像视角变化事件作为手控操作入口s111-1,将s111的全景图像视角变化监听触发事件作为s111-2,其事件处理函数为转向操作,人机交互拖动全景图像引起视角变化,触发激活该函数,响应转向操作,在全景图像窗口区块s110之外设置一个按钮s130,在s130中创建一个按钮处理函数s131终止操作,按钮单击事件作为手控操作入口,由于本实施例是建立在几个街区小范围的全景图像采集,因此,如果一定时间手控操作入口无触发响应,自动行进就会走出全景图像采集范围了,造成无全景图像显示的死机状态,因此,本实施例创建一个程序设定重放操作,在所建立的几个街区的最小外接矩形范围的全景图像采集区域,设定一个矩形边界作为程序操作入口,判断目前显示的初始点位的全景图像的经纬度坐标,在所设定的矩形边界之外,则响应重放操作,因此,在程序中设计一个重放操作程序s150,其矩形边界条件为程序操作入口,s151为重放操作处理函数,如图2所示,这是本发明技术方案中用户界面的基本操作构成,目的是为了说明在本发明技术方案中,模拟驾驶、虚拟观光,只要有个方向盘、刹车、重新开始即可,转向在步骤四中讲解,刹车、重新开始在步骤五中讲解,对通过网页url网址路径后面的查询字符串格式读取id编码、行进方向、行进距离、时间间隔、行进状态模式5个参数,并依次赋值给程序中的id、d、m、t、p变量,实现可控行进显示全景图像,计算机程序进行以下步骤:
步骤一:构建行进显示模型1,构建街景地图可控行进显示全景的起始状态,包括设置一个数据结构,街景地图可控行进数据结构内的行进参数包括,初始点位、行进方向、行进间距、时间间隔,赋初始值,设置行进状态模式,进入步骤二。本发明实施例可以提供如下具体方案:本发明实施例对行进显示模型对象实例的构建,具体是,定义id表示所述初始点位、定义d表示所述行进方向、定义m表示所述行进距离、定义t表示所述时间间隔,定义p表示所述行进状态模式,并赋初始值,id=120300074(地区码)1123(道路码)0210(门牌码)xxx(路口关联码)n(特征码),d=50度,m=1个,t=3秒,p=行进自动状态模式,m=1个表示顺序无间隔提取沿街下一个全景图像,由于本发明实施例采用网页形式,因此,赋初始值的实现形式,具体在生成网页时为panodriveshow.html@id=12030007411230210xxxn&d=50&m=30&t=3&p=行进自动状态模式,在加载网页时,通过网页url网址路径后面的查询字符串格式读取5个参数数值,并对应赋值变量,这样构建起街景地图可控行进显示全景的行进显示模型的起始状态对象实例。需要说明的是,本发明对各变量的具体命名、初始值设置,不加以限制,本发明使用的行进显示模型,围绕所述初始点位,通过设置时间、间距、方向,是实现可控行进显示全景图像、人机交互模拟驾驶、虚拟观光浏览的数学表达基础,属本发明原创,为了在网络终端加载网页后,直接进入步骤五:行进过程状态递进,实现加载网页后页面直接播放效果,因而设置p=行进自动状态模式,本发明将网络视频播放形式引入到街景地图的模拟驾驶中,属本发明原创。
30.步骤二:行进起始状态显示2,显示街景地图可控行进显示全景的起始状态,包括初始点位全景图像显示,进入步骤三。本发明实施例可以提供如下具体方案:使用实例化全景图像视窗的setpano()、setpov(),即s111.setpano(id)、s111.setpov(d),显示沿行进方向的定向显示初始点位的全景图像。本发明该实施例只使用一个全景图像视窗,而没用电子地图视窗,表明,本发明技术方案可以建立在全景图像视窗完成模拟驾驶操作,实现虚拟浏览。
31.步骤三:行进循环控制3,监测模拟驾驶操作的操作载体的控制操作入口是否有触发,所述控制操作入口包括手控操作入口、程序操作入口,所述模拟驾驶操作包括启动操作、转向操作、停止操作,如果有、则进一步判断是否是终止操作,如果是则结束、否则跳转至步骤四,如果未监测到触发、则进一步判断行进状态模式,如果是行进暂停状态模式、则跳转至步骤四,如果是行进自动状态模式、则跳转至步骤五,结束。本发明实施例可以提供如下具体方案:设计一个全景图像视窗的转向操作、一个按钮终止操作、一个程序设定的重放操作,转向操作的操作载体是全景图像视窗s111,通过s111的全景图像视角变化事件"pov_changed"作为手控操作入口s111-1,将s111的全景图像视角变化监听触发事件addeventlistener("pov_changed",povchange,this)作为s111-2,其事件处理函数为function povchange(event);终止操作按钮是在s110之外创建一个按钮s130控件《inputtype="button"id="s131"name="s131"value="stop"onclick="button_stop_function()" /》,onclick为手控操作入口;程序设定的重放操作s150程序,在程序中,借助所存储全部全景图像的经纬度,通过排序得出经度最大最小值、纬度最大最小值,即n个全景图像地理位置的外接最小矩形,将该外接最小矩形作为边界条件视为程序操作入口,重放操作处理函数设计为s151:function replay(外接最小矩形边界西北角经纬度,外接最小矩形边界东南角经纬度,兴趣点位经纬度);本实施例的p的初始值=行进自动状态模
式,因此,能实现程序加载后自动行进。
32.步骤四:行进起始状态调整4,调整街景地图可控行进显示全景的起始状态,包括激活所监测到的模拟驾驶操作,对应操作响应,进入步骤二。本发明实施例可以提供如下具体方案:只设计了一个手控操作入口、一个转向操作,目的是为了说明在本发明技术方案中,模拟驾驶中只要有个方向盘、刹车、重新开始即可,刹车、重新开始在步骤五中说明,转向操作具体实现是,人工见到全景图像中的路口,通过全景图像视窗内人机交互拖动图像转弯上另一条路即可,转向操作的操作载体是s111,触发s111的全景图像视角变化事件"pov_changed"手控操作入口s111-1,触发s111的全景图像视角变化监听触发事件addeventlistener("pov_changed",povchange,this)s111-2,激活其事件处理函数function povchange(event)响应转向操作是{转动后全景图像水平视角h=event.args.heading; 转动后全景图像竖直视角v= event.args.pitch; 转向操作的响应是按照专用全景图像id街道线路编码规则,根据转动后全景图像水平视角h、全景图像id的特征码为路口标识,以及路口关联码,从全景图像属性数据表中检索出一个具有相同路口关联码的一条新道路上的一个新全景图像id,再沿着该条新道路上的新全景图像id,再根据转动后全景图像水平视角h、门牌码,获取行进方向上的下一个新全景图像id,如果获取一个新全景图像id、则将该新全景图像id作为所述初始点位、所述行进方向=转动后全景图像水平视角h、p不变,跳转至步骤二; };终止操作处理函数s131为button_stop_function()触发响应包括,对所述构建行进显示模型中的内容,包括初始点位id、行进方向d、行进间距m、时间间隔t赋初始值,即id=12030007411230210xxxn,d=50度,m=1个,t=3秒,行进状态模式p=行进暂停状态模式,自动循环停止,程序结束,具体操作过程是在s130上按一下鼠标左键、监测到按钮控件的单击事件onclick触发、激活button_stop_function()响应终止操作;重放操作处理函数设计为s151:function replay(外接最小矩形边界西北角经纬度,外接最小矩形边界东南角经纬度,兴趣点位经纬度),具体触发、激活、响应包括,判断兴趣点位经纬度是否落在外接最小矩形边界之外,如果是,则对包括初始点位id、行进方向d、行进间距m、时间间隔t赋初始值,id=12030007411230210xxxn,d=50度,m=1个,t=3秒,行进状态模式p=行进自动状态模式,跳转至步骤二,达到重放目的。
33.步骤五:行进过程状态递进5,更新街景地图可控行进显示全景的起始状态,按照所述时间间隔进行延时操作,还包括按照行进一步算法,基于所述初始点位,沿着所述行进方向、所述行进间距,取得下一个兴趣点位作为将要显示的初始点位,所述行进一步算法进一步包括,全景图像id编码算法,全景图像地理坐标算法,进入步骤二。本发明实施例可以提供如下具体方案:利用延迟函数setinterval(t)或settimeout(t),实现按照所述时间间隔进行延时操作,由于本发明实施例1所采用的全景图像id编码规则是可知的,既在相邻的几个街区内的街道上每隔约30米,沿街道人工顺序采集一个全景图像,全景图像id编码规则,是9位地区码 4位道路码 4位门牌码 3位路口关联码 1位特征码的21位的专用全景图像id街道线路编码规则,因此,采用了id编码算法作为所述行进一步算法,取得下一个兴趣点位作为将要显示的初始点位,具体是在已知一个全景图像id基础上,就可按照所述行进距离为相邻全景图像采集点,从全景图像id的4位道路码,推导出同一条道路,再根据行进方向d、该条道路沿门牌码递增规则,获得沿行进方向的相邻的下一个新兴趣点位的全景图像id。
34.实施例2,作为本发明的实施例2,如图1所示,示出了本发明实现一种实现街景地图可控行进显示全景计算机系统的程序流程图,构建行进显示模型对象实例,是通过使用一组变量形成一个街景地图可控行进数据结构,设置变量,id表示初始点位全景图像id、lng表示初始点位经度、lat表示初始点位纬度、d表示行进方向、m表示行进距离、t表示时间间隔、p表示行进状态模式,并赋初始值实现的,编程语言使用javascript脚本语言,基于html5及css3,编程环境具体可以使用javascript脚本语言、腾讯公司的街景地图javascriptapi及其网络全景图像数据,实施例2以一个名为panodrivecar.html互联网网页s100作为载体,以一个全景图像视窗作为全景图像显示载体,一个电子地图视窗作为一个全景图像对应地理位置显示标注载体,将网页首屏s100内左右一分为二,如图3所示,分别从左向右具体使用《div》标签创建并命名为一个全景图像窗口区块s110和一个电子地图窗口区块s120,首先使用javascript脚本语言在一个页面中初始化腾讯公司的街景地图使用《scripttype="text/javascript"charset="utf-8"src="http://map.qq.com/api/js@v=2.exp"》《/script》,具体使用腾讯地图api的newqq.maps.map(“s120”,{center:newqq.maps.latlng(39.1312,117.1121),zoom:13})在电子地图窗口区块s120内实例化一个电子地图并命名为电子地图视窗s121,具体使用newqq.maps.panorama()在全景图像窗口区块s110内实例化一个全景图像并命名为全景图像视窗s111,将s121电子地图鼠标点击事件作为手控操作入口s121-1,将s121电子地图鼠标点击监听触发事件作为s121-2,其事件处理函数为定位操作,将s111全景图像视角变化事件作为手控操作入口s111-1,将s111的全景图像视角变化监听触发事件作为s111-2,其事件处理函数为模拟驾驶操作,人机交互拖动全景图像引起视角变化,触发激活该函数,全景图像左右水平视角变化响应转向操作s111-2-1、全景图像竖直视角变化达到0度以下响应暂停操作s111-2-2、全景图像竖直视角变化达到0度以上响应启动操作s111-2-3,在全景图像窗口区块s110、电子地图窗口区块s120之外,设置一个按钮s130,在s130中创建一个按钮处理函数s131终止操作,按钮单击事件作为手控操作入口,设置一个按钮s140,在s140中创建一个按钮处理函数s141回溯操作,按钮单击事件作为手控操作入口,回溯操作响应分两种情况,一种是在自动循环行进过程中、则反向行进,另一种是在暂停状态、则返回一个行进距离,即上一个点位显示状态,如图3所示,这是本发明技术方案中基于街景地图用户界面的基本构成,目的是为了说明在本发明技术方案中,模拟驾驶、虚拟观光,只要有个方向盘、刹车、启动即可,回溯操作突出本技术方案的优势与创新,电子地图上的定位操作突出虚拟驾驶的技术优势,对通过网页url网址路径后面的查询字符串格式读取初始点位经纬度坐标、行进方向、行进距离、时间间隔、行进状态模式7个参数,并依次赋值给程序中的id、lng、lat、d、m、t、p变量,实现包括转向、暂停、启动、回溯、定位操作的可控行进显示全景图像,计算机程序进行以下步骤:步骤一:构建行进显示模型1,构建街景地图可控行进显示全景的起始状态,包括设置一个数据结构,街景地图可控行进数据结构内的行进参数包括,初始点位、行进方向、行进间距、时间间隔,赋初始值,设置行进状态模式,进入步骤二。本发明实施例可以提供如下具体方案:本发明实施例对行进显示模型对象实例的构建,具体是,定义id表示所述初始点位全景图像id、定义lng表示所述初始点位经度、lat表示所述初始点位纬度、定义d表示所述行进方向、定义m表示所述行进距离、定义t表示所述时间间隔,定义p表示所述行进状
态模式,并赋初始值,id=100115911208021648076xx,lng=117.1121,lat=39.1312,d=50度,m=30米,t=3秒,p=行进暂停状态模式,由于本发明实施例采用网页形式,因此,赋初始值的实现形式,具体在生成网页时为panodrivecar.html@id=100115911208021648076xx&lat=39.1312&lng=117.1121&d=50&m=30&t=3&p=行进暂停状态模式,在加载网页时,通过网页url网址路径后面的查询字符串格式读取6个参数数值,并对应赋值变量,这样构建起街景地图可控行进显示全景的行进显示模型的起始状态对象实例。需要说明的是,本发明对各变量的具体命名、初始值设置,不加以限制,本发明使用的行进显示模型,围绕所述初始点位、间距、方向,是实现可控行进显示全景图像、人机交互模拟驾驶、虚拟观光浏览的数学表达基础,属本发明原创,为了实现加载网页后,页面直接人工操控调整起始状态,因而在步骤一赋初始值中,设置p=行进暂停状态模式。
35.步骤二:行进起始状态显示2,显示街景地图可控行进显示全景的起始状态,包括初始点位全景图像显示,进入步骤三。本发明实施例可以提供如下具体方案:首次显示包括,通过varcenter=newqq.maps.latlng(lat,lng);s121=newqq.maps.map(document.getelementbyid("s120"),{center:center,zoom:math.abs(1)});使用所述初始点位的经纬度坐标数值lng=117.1121,lat=39.1312,及s121-3=newqq.maps.marker()实例化一个图标显示在电子地图视窗s121电子地图上,如图3所示,通过s111=newqq.maps.panorama(document.getelementbyid("s110"),{pano:id,pov:{heading:parsefloat(d),pitch:parsefloat(1)},zoom:parseint(1)});将s110实例化s111并将包括id、水平视角d、竖直视角1、放大系数1的全景图像显示在s111,上述是所述初始点位的全景图像定向、地图定位标注首次显示;非首次显示包括,根据步骤五:行进过程状态递进计算出,或者是通过定位操作获取的兴趣点位经纬度坐标,在电子地图上重新定位显示s121-3图标,使用街景信息查询接口newqq.maps.panoramaservice()实例化全景图像视窗街景信息查询接口pano_service,通过pano_service.getpano(兴趣点位经纬度坐标,radius,function(result){s111.setpano(result.svid);});s111.setpov({heading:d,pitch:1});s111.setzoom(1);}获取兴趣点位范围内的一个全景图像并定向显示。需要说明的是,本发明对全景图像显示、电子地图图标显示的具体样式不做限制。
36.步骤三:行进循环控制3,监测模拟驾驶操作的操作载体的控制操作入口是否有触发,所述控制操作入口包括手控操作入口、程序操作入口,所述模拟驾驶操作包括启动操作、转向操作、停止操作,如果有、则进一步判断是否是终止操作,如果是则结束、否则跳转至步骤四,如果未监测到触发、则进一步判断行进状态模式,如果是行进暂停状态模式、则跳转至步骤四,如果是行进自动状态模式、则跳转至步骤五,结束。本发明实施例可以提供如下具体方案:在全景图像视窗内设计了一个视角变化事件作为手控操作入口,实现转向操作、暂停操作、启动操作3个操作,转向操作、暂停操作、启动操作的操作载体是s111,选用s111的全景图像视角变化事件"pov_changed"作为手控操作入口s111-1,s111的全景图像视角变化监听触发事件qq.maps.event.addlistener(s111,'pov_changed',function())作为s111-2,其事件处理函数为function(){转向操作处理程序、暂停操作处理程序、启动操作处理程序},实际操作是在全景图像视窗的全景图像上,鼠标或屏幕触发拖动全景图像水平或竖直转向,从而触发全景图像视角变化触发事件,激活事件处理函数,获得当前
全景图像视角数值,按照设置的一个视角数值范围,对应响应转向操作、暂停操作、启动操作操作;在电子地图视窗内选用鼠标单击事件"click"设计了一个手控操作入口作为s121-1、一个定位操作function(event){},如图3所示,s121的电子地图上鼠标单击监听触发事件qq.maps.event.addlistener(s121, "click", function(event)) 作为s121-2,其事件处理函数为function(event){定位操作处理程序},如果监测到全景图像视窗有s111-1"pov_changed"触发、电子地图视窗有s121-1"click"触发,则跳转至步骤四;在全景图像、电子地图窗口之外,设计一个终止按钮,终止操作按钮是在s110、s120之外创建一个按钮s130控件《inputtype="button"id="s131"name="s131"value="stop"onclick="button_stop_function()" /》,onclick为手控操作入口,具体操作过程是在s130上按一下鼠标左键、监测到按钮控件的单击事件onclick触发,则跳转至步骤四激活button_stop_function()响应终止操作;设计一个回溯按钮,回溯操作响应分两种情况,一种是在自动循环行进过程中、则反向行进,另一种是在暂停状态、则返回一个行进距离,即前一个初始点位显示状态,回溯操作突出本技术方案的优势与创新回溯操作按钮是在s110、s120之外创建一个按钮s140控件《inputtype="button"id="s141"name="s141"value="return"onclick="button_return_function()" /》,onclick为手控操作入口,具体操作过程是在s140上按一下鼠标左键、监测到按钮控件的单击事件onclick触发,则跳转至步骤四激活button_return_function()响应回溯操作。
37.步骤四:行进起始状态调整4,调整街景地图可控行进显示全景的起始状态,包括激活所监测到的模拟驾驶操作,对应操作响应,进入步骤二。本发明实施例可以提供如下具体方案:在全景图像视窗内设计了一个手控操作入口、一个转向操作、暂停操作、启动操作,目的是为了说明在本发明技术方案中,模拟人工驾驶中的包括转向、刹车、启动的基本操作,具体是,在s111的全景图像视角变化事件"pov_changed"手控操作入口s111-1监听到s111的全景图像视角有变化触发后,激活qq.maps.event.addlistener(s111, 'pov_changed', function())其事件处理函数function(){var pov = s111.getpov(); var h = pov.heading; var v = pov.pitch;获取全景图像视角变化后当前全景图像水平视角h、竖直视角v的具体数值,转向操作处理程序响应包括,所述行进方向d=h,全景图像水平视角与所述行进方向同步调整,即在全景图像转向同时,行进方向同步调整,实现在街道交叉口拐弯,转向操作响应,行进状态标识变量p无变化,行进状态模式不变,进入步骤二,暂停操作处理程序响应包括,判断转动后全景图像竖直视角v,如果小于0、则行进状态标识变量p=行进暂停状态模式,实现程序在没有启动操作响应之前处于暂停状态,进入步骤二,启动操作处理程序响应包括,判断转动后全景图像竖直视角v,如果大于0、则行进状态标识变量p=行进自动状态模式,实现程序在没有停止操作响应之前处于自动循环行进状态,进入步骤二,本发明技术方案的模拟驾驶操作的暂停操作、启动操作是根据人工驾车常识,踩刹车,车尾向上仰、车头向下沉,反之即反,因此,竖直视角选择以0度为界,即水平为界,0度以上为启动标识,0度以下为暂停标识,转向操作是根据汽车前挡风玻璃内景观,为正前方视野的人工驾驶习惯,设计全景图像视窗内的中心显示的景物与行进方向一致,符合人机工程学原理;在电子地图视窗内设计了一个手控操作入口、一个定位操作,目的是为了说明在本发明技术方案中,实现更换所述初始点位的地理位置,具体是,s121的电子地图视窗鼠标单击事件"click"手控操作入口s121-1监听到s121的电子地图视窗鼠标单击事件触发在之
后,激活qq.maps.event.addlistener(s121, "click", function(event))其事件处理函数function(event){定位操作处理程序},定位操作处理程序响应包括,获取鼠标所点击位置的经纬度坐标赋值给所述初始点位经度lng、所述初始点位纬度lat,var point=event.latlng;lat=point.getlat();lng=point.getlng(),进入步骤二,为非首次全景图像显示、电子地图上点位图标标注作数据准备,行进状态标识变量p无变化;在全景图像、电子地图窗口之外,设计的终止按钮,终止操作处理函数s131为button_stop_function(),button_stop_function()包括对所述构建行进显示模型中的内容,包括初始点位id、经纬度lng和lat、行进方向d、行进间距m、时间间隔t赋初始值,即id=100115911208021648076xx,lng=117.1121,lat=39.1312,d=50度,m=30米,t=3秒,行进状态模式p=行进暂停状态模式,自动循环停止,全景图像显示、电子地图上点位图标标注,程序结束;在全景图像、电子地图窗口之外,设计的回溯按钮,回溯操作响应分两种情况,一种是在自动循环行进过程中、则反向行进,另一种是在暂停状态、则返回一个行进距离,即前一个初始点位显示状态,回溯操作突出本技术方案的优势与创新,回溯操作处理函数s141为button_return _function(),button_return_function()包括,判断程序运行状态,如果是行进暂停状态,即p=行进暂停状态模式,则以现有初始点位的经纬度坐标为基础,按照d=180 d反向计算出m距离前一个初始点位的经纬度坐标,跳转至步骤二,如果是行进自动状态,即p=行进自动状态模式,则d=180 d反向行进,跳转至步骤二。
38.步骤五:行进过程状态递进5,更新街景地图可控行进显示全景的起始状态,按照所述时间间隔进行延时操作,还包括按照行进一步算法,基于所述初始点位,沿着所述行进方向、所述行进间距,取得下一个兴趣点位作为将要显示的初始点位,所述行进一步算法进一步包括,全景图像id编码算法,全景图像地理坐标算法,进入步骤二。本发明实施例可以提供如下具体方案:利用延迟函数setinterval(t)或settimeout(t),使用全景图像地理坐标算法,如图4所示,实现按照所述时间间隔向前行驶操作,具体是基于所述初始点位的地理经纬度坐标lng、lat,沿着所述行进方向d、所述行进间距m,利用直角三角函数正弦、余弦公式,计算出下一个兴趣点位的地理经纬度坐标,并赋值给lng、lat,进入步骤二,为非首次全景图像显示、电子地图上点位图标标注作数据准备。
39.以上对本发明所提供的一种实现街景地图可控行进显示全景计算机系统,进行了详细介绍,本文中应用了具体2个实施例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制,本领域技术人员应该可以理解,如果利用其它开发平台,使用某种计算机语言开发,无论是计算机、智能手机、便携式电脑、平板电脑、智能电视、智能平板显示设备,只要在屏幕内全景图像、电子地图对象具有上述设计、操作、功能,都应该在本发明申请的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
