1.本发明涉及风电场设计及选址技术领域,具体提供一种风电场功率的预测方法和装置。
背景技术:
2.在对风电场进行微观选址、设计优化的过程中,如何能够快速准确的预测风电场中的各个风电机组的功率具有非常重要的意义。应用传统尾流模型进行风电场功率预测,由于模型较为简单,计算速度快,被广泛应用于风电场微观选址、设计优化当中。但是,随着风电场流场尺度的增大,风电场的风能吸收机理会变成由边界层效应主导。传统的尾流模型因其无法预测大气边界和大尺度风电场之间的垂向交互作用,因而会导致功率预测精度显著降低。
3.相应地,本领域需要一种新的风电场功率预测方案来解决上述问题。
技术实现要素:
4.为了克服上述缺陷,提出了本发明,以提供解决或至少部分地解决由于未考虑风电场边界层效应,导致风电场功率预测精度降低的问题。
5.在第一方面,本发明提供一种风电场功率的预测方法,所述预测方法包括:
6.针对所述风电场中的每台风电机组,基于尾流效应,获取当前风电机组的第一预测功率;
7.基于边界层效应,获取所述当前风电机组的第二预测功率;
8.根据所述第二预测功率,对所述第一预测功率进行功率修正,获取所述当前风电机组的最终预测功率。
9.在上述风电场功率的预测方法的一个技术方案中,所述风电场中的风电机组按照矩阵式排布方式进行排布,所述矩阵式排布方式将所述风电场中的风电机组在来流风向上划分为多排风电机组,所述矩阵式排布方式将所述风电场中的风电机组在来流风向的垂直方向上划分为多列风电机组;
[0010]“根据所述第二预测功率,对所述第一预测功率进行功率修正,获取所述当前风电机组的最终预测功率”的步骤包括:
[0011]
根据所述风电场的来流风向,获取所述风电场的多排风电机组中不受尾流影响的风电机组作为首排风电机组,每个首排风电机组分别作为每列风电机组的第一台风电机组;
[0012]
当所述当前风电机组不是首排风电机组时,根据所述当前风电机组所在列的首排风电机组的第一预测功率和所述当前风电机组的第二预测功率,对所述当前风电机组的第一预测功率进行修正,以获取所述当前风电机组的最终预测功率;
[0013]
当所述当前风电机组为首排风电机组时,直接将所述当前风电机组的第一预测功率作为所述当前风电机组的最终预测功率。
[0014]
在上述风电场功率的预测方法的一个技术方案中,“根据所述当前风电机组所在列的首排风电机组的第一预测功率和所述当前风电机组的第二预测功率,对所述当前风电机组的第一预测功率进行修正,以获取所述当前风电机组的最终预测功率”的步骤包括通过以下公式计算所述当前风电机组的最终预测功率:
[0015]
p
tm2
=p
tm1
(p
t-p
tm1
)e-m
[0016]
其中,p
tm2
为当前风电机组t的最终预测功率,p
tm1
为当前风电机组t的修正功率的中间值,p
t
为当前风电机组t的第一预测功率,m为对当前风电机组t产生尾流影响的其他风电机组的数量;
[0017]
所述中间值p
tm1
根据以下公式计算获得:
[0018]
p
tm1
=p
∞
(p
0-p
∞
)e-m
[0019]
p
∞
为当前风电机组t的第二预测功率,p0为当前风电机组t所在列的首排风电机组的第一预测功率。
[0020]
在上述风电场功率的预测方法的一个技术方案中,“基于尾流效应,获取当前风电机组的第一预测功率”的步骤包括:
[0021]
根据所述风电场的来流风速和所述风电场中风电机组的尾流膨胀率,采用基于尾流效应建立的尾流模型,获取所述风电场的速度分布;
[0022]
根据所述速度分布,获取所述当前风电机组的风轮高度处的第一平均风速;
[0023]
根据所述第一平均风速以及预设的当前风电机组的功率曲线,获取所述第一预测功率;
[0024]
其中,所述功率曲线包括所述第一平均风速与所述第一预测功率的对应关系。
[0025]
在上述风电场功率的预测方法的一个技术方案中,所述方法还包括:
[0026]
根据所述风电场中风电机组的风轮高度处的来流湍流度,根据以下公式获取所述风电场中风电机组的尾流膨胀率:
[0027]
k=2
×
(0.3837
×
i 0.003678)
[0028]
其中,k为所述尾流膨胀率,i为所述来流湍流度。
[0029]
在上述风电场功率的预测方法的一个技术方案中,所述方法还包括根据以下公式获取所述尾流模型:
[0030][0031]
其中,dw为一台风电机组尾流区域内任意位置与所述一台风电机组的风轮的距离,u(dw)为距离所述一台风电机组的风轮的距离为dw处的平均速度,u
∞
为所述风电场的来流风速,c
t
为所述一台风电机组的推力系数,k为所述尾流膨胀率,r为所述一台风电机组的风轮半径;
[0032]“根据所述风电场的来流风速和所述风电场中风电机组的尾流膨胀率,采用基于尾流效应建立的尾流模型,获取所述风电场的速度分布”的步骤包括:
[0033]
根据所述风电场的来流风速和所述风电场中风电机组的尾流膨胀率k,采用所述尾流模型,根据以下公式获取所述风电场的任意位置的平均速度:
[0034][0035]
其中,u(x)为所述风电场的任意位置的平均速度,x为所述风电场的任意位置的坐标,xi为所述风电场的任意位置的第i台上游风电机组的横坐标,t为所述风电场的任意位置的上游风电机组的集合;
[0036]
根据所述风电场的任意位置的平均速度,获取所述风电场的速度分布。
[0037]
在上述风电场功率的预测方法的一个技术方案中,“基于边界层效应,获取所述当前风电机组的第二预测功率”的步骤包括:
[0038]
根据所述风电场的来流风速和所述风电场的大气边界层高度,采用基于边界层效应建立的边界层模型,获取所述风电场在充分发展状态下所述当前风电机组的风轮高度处的第二平均风速;
[0039]
根据所述第二平均风速和以及预设的当前风电机组的功率曲线,获取所述第二预测功率;
[0040]
其中,所述功率曲线包括所述第二平均风速与所述第二预测功率的对应关系;所述充分发展状态是指所述风电场内流动的风速在风电场所在空间上沿流向呈现稳定的周期性变化状态。
[0041]
在上述风电场功率的预测方法的一个技术方案中,所述方法还包括根据以下公式获取所述边界层模型:
[0042][0043]
其中,z
0,hi
为所述风电场的等效粗糙度,zh为所述风电场中风电机组的轮毂高度,z
0,lo
为所述风电场的地表粗糙度,d为所述风电场中风电机组的风轮直径,κ为冯卡门常数,c
ft
和v
w*
为计算过程的中间值,c
ft
=πc
t
/(4s
x
sy),s
x
和sy分别为所述风电场中相邻两台风电机组的流向距离和展向距离与风轮直径之比;
[0044]“根据所述风电场的来流风速和所述风电场的大气边界层高度,采用基于边界层效应建立的边界层模型,获取所述风电场在充分发展状态下所述当前风电机组的风轮高度处的第二平均风速”的步骤包括:
[0045]
根据所述风电场的来流风速获取不受所述风电场影响的风电场上游位置的高度zh处的平均来流风速;
[0046]
根据所述风轮高度zh处的平均来流风速并按照以下公式获取所述风电场在充分发展状态下当前风电机组的风轮高度处的第二平均风速:
[0047]
[0048]
其中,为所述风电场在充分发展状态下当前风电机组的风轮高度zh处的第二平均风速,为所述高度zh处的平均来流风速,δ为所述大气边界层高度。
[0049]
在上述风电场功率的预测方法的一个技术方案中,所述方法还包括根据以下步骤获取所述地表粗糙度:
[0050]
任意选取所述风电场上游位置的两个高度,并分别获取所述两个高度处的平均风速;
[0051]
根据所述两个高度处的平均风速以及所述平均风速与所述地表粗糙度之间的关系,获取所述地表粗糙度;
[0052]
其中,所述风电场上游位置的任意高度处的平均风速与所述地表粗糙度之间的关系通过以下公式确定:
[0053][0054]
其中,为所述风电场上游位置的高度z处的平均来流风速,u
*lo
为所述风电场的地面摩擦速度。
[0055]
在第二方面,提供一种控制装置,该控制装置包括处理器和存储装置,所述存储装置适于存储多条程序代码,所述程序代码适于由所述处理器加载并运行以执行上述风电场功率的预测方法的技术方案中任一项技术方案所述的风电场功率的预测方法。
[0056]
本发明上述一个或多个技术方案,至少具有如下一种或多种有益效果:
[0057]
在实施本发明的技术方案中,能够针对风电场中的每台风电机组,分别获取基于尾流效应的第一预测功率和基于边界层效应的第二预测功率,并使用第二预测功率对第一预测功率进行功率修正,以获取当前风电机组的最终预测功率。基于上述配置方式,本发明能够充分考虑风电场的边界层效应对于风电场功率预测的精度的影响,使用基于边界层效应的第二预测功率对基于尾流效应的第一预测功率进行修正,提升了基于尾流效应获取的风电场功率的精度,实现了快速、简单、准确的对风电场功率的预测。
附图说明
[0058]
参照附图,本发明的公开内容将变得更易理解。本领域技术人员容易理解的是:这些附图仅仅用于说明的目的,而并非意在对本发明的保护范围组成限制。其中:
[0059]
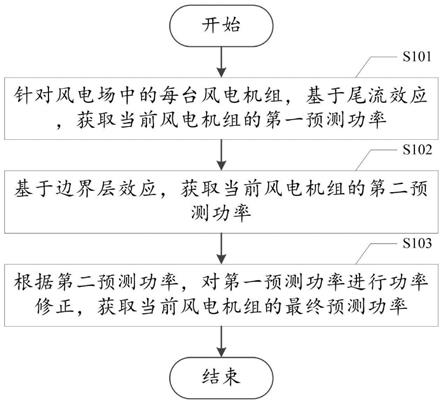
图1是根据本发明的一个实施例的风电场功率的预测方法的主要步骤流程示意图;
[0060]
图2是根据本发明实施例的一个实施方式的horns rev风电场机组排布示意图;
[0061]
图3是根据本发明实施例的一个实施方式的风电机组的功率曲线示意图;
[0062]
图4是根据本发明实施例的一个实施方式的不同的风电场功率的预测方法对计算结果比对示意图。
具体实施方式
[0063]
下面参照附图来描述本发明的一些实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围。
[0064]
在本发明的描述中,“模块”、“处理器”可以包括硬件、软件或者两者的组合。一个模块可以包括硬件电路,各种合适的感应器,通信端口,存储器,也可以包括软件部分,比如程序代码,也可以是软件和硬件的组合。处理器可以是中央处理器、微处理器、数字信号处理器或者其他任何合适的处理器。处理器具有数据和/或信号处理功能。处理器可以以软件方式实现、硬件方式实现或者二者结合方式实现。非暂时性的计算机可读存储介质包括任何合适的可存储程序代码的介质,比如磁碟、硬盘、光碟、闪存、只读存储器、随机存取存储器等等。术语“a和/或b”表示所有可能的a与b的组合,比如只是a、只是b或者a和b。术语“至少一个a或b”或者“a和b中的至少一个”含义与“a和/或b”类似,可以包括只是a、只是b或者a和b。单数形式的术语“一个”、“这个”也可以包含复数形式。
[0065]
参阅附图1,图1是根据本发明的一个实施例的风电场功率的预测方法的主要步骤流程示意图。如图1所示,本发明实施例中的风电场功率的预测方法主要包括下列步骤s101-步骤s103。
[0066]
步骤s101:针对风电场中的每台风电机组,基于尾流效应,获取当前风电机组的第一预测功率。
[0067]
在本实施例中,针对风电场中的每台风电机组,可以基于尾流效应,获取当前风电机组的第一预测功率。其中,尾流效应是指风电机组从风中获取能量的同时在其下游形成风速下降的尾流区,若下游由风电机组位于尾流区内,下游风电机组输入风速就低于上游风电机组的输入风速。第一预测功率是指考虑到风电机组受到尾流效应影响到风电机组的功率。
[0068]
步骤s102:基于边界层效应,获取当前风电机组的第二预测功率。
[0069]
在本实施例中,可以基于边界层效应,获取当前风电机组的第二预测功率。其中,边界层是指大气边界层,即大气最底层,靠近地球表面、受地面摩擦阻力影响的大气层区域。第二预测功率即为考虑到边界层效应获取的风电机组的功率。
[0070]
步骤s103:根据第二预测功率,对第一预测功率进行功率修正,获取当前风电机组的最终预测功率。
[0071]
在本实施例中,可以使用步骤s102获取的第二预测功率,对步骤s101获取的第一预测功率进行功率修正,获取当前风电机组的最终预测功率。即风电机组的最终预测功率综合考虑到了尾流效应和边界层效应的影响。
[0072]
基于上述步骤s101-步骤s103,本发明能够针对风电场中的每台风电机组,分别获取基于尾流效应的第一预测功率和基于边界层效应的第二预测功率,并使用第二预测功率对第一预测功率进行功率修正,以获取当前风电机组的最终预测功率。基于上述配置方式,本发明能够充分考虑风电场的边界层效应对于风电场功率预测的精度的影响,使用基于边界层效应的第二预测功率对基于尾流效应的第一预测功率进行修正,提升了基于尾流效应获取的风电场功率的精度,实现了快速、简单、准确的对风电场功率的预测。
[0073]
下面对步骤s101至步骤s103作进一步地说明。
[0074]
在本发明实施例的一个实施方式中,步骤s101可以进一步包括以下步骤s1011至步骤s1013:
[0075]
步骤s1011:根据风电场的来流风速和风电场中风电机组的尾流膨胀率,采用基于尾流效应建立的尾流模型,获取风电场的速度分布。
[0076]
在本实施方式中,可以根据风电场的来流风速和当前风电机组的尾流膨胀率,采用基于尾流效应建立的尾流模型,获取风电场的速度分布。
[0077]
一个实施方式中,可以根据风电场中风电机组的风轮高度处的来流湍流度,根据以下公式(1)获取风电场中风电机组的尾流膨胀率:
[0078]
k=2
×
(0.3837
×
i 0.003678)
ꢀꢀꢀ
(1)
[0079]
其中,k为尾流膨胀率,i为来流湍流度。
[0080]
一个实施方式中,可以根据以下公式(2)获取基于尾流效应的尾流模型:
[0081][0082]
其中,dw为一台风电机组尾流区域内任意位置与一台风电机组的风轮的距离,u(dw)为距离一台风电机组的风轮的距离为dw处的平均速度,u
∞
为风电场的来流风速,c
t
为一台风电机组的推力系数,k为尾流膨胀率,r为一台风电机组的风轮半径。
[0083]
一个实施方式中,步骤s1011可以包括以下步骤:
[0084]
步骤s10111:根据风电场的来流风速和风电场中风电机组的尾流膨胀率k,采用尾流模型,根据以下公式(3)获取风电场的任意位置的平均速度:
[0085][0086]
其中,u(x)为风电场的任意位置的平均速度,x为风电场的任意位置的坐标,其中x为风电场的任意位置的横坐标,xi为风电场的任意位置的第i台上游风电机组的横坐标,t为风电场的任意位置的上游风电机组的集合。
[0087]
步骤s10112:根据风电场的任意位置的平均速度,获取风电场的速度分布。
[0088]
在本实施方式中,可以根据步骤s10111获取的风电场的任意位置的平均速度,获取风电场的速度分布。
[0089]
步骤s1012:根据速度分布,获取当前风电机组的风轮高度处的第一平均风速。
[0090]
在本实施方式中,可以根据当前风电机组的风轮高度处的坐标以及步骤s1011获取的风电场的速度分布,获取当前风电机组风轮高度处的第一平均风速。
[0091]
一个实施方式中,可以根据步骤s1011获取的风电机组的速度分布,分别获取风电机组风轮范围内多个点位的速度,并获取多个点位的速度的平均值,将这个平均值作为当前风电机组风轮高度处的第一平均风速。
[0092]
步骤s1013:根据第一平均风速以及预设的当前风电机组的功率曲线,获取第一预测功率;其中,功率曲线包括第一平均风速与第一预测功率的对应关系。
[0093]
在本实施方式中,可以根据第一平均风速以及预设的当前风电机组的功率曲线,获取第一预测功率。
[0094]
一个实施方式中,可以参阅附图3,图3是根据本发明实施例的一个实施方式的风电机组的功率曲线示意图,其中,横坐标为风速,纵坐标为功率。可以根据步骤s1012中获取的第一平均风速,查询当前风电机组的功率曲线,获取当前风电机组的第一预测功率。
[0095]
在本发明实施例的一个实施方式中,步骤s102可以进一步包括,步骤s1021至步骤
s1022:
[0096]
步骤s1021:根据风电场的来流风速和风电场的大气边界层高度,采用基于边界层效应建立的边界层模型,获取风电场在充分发展状态下当前风电机组的风轮高度处的第二平均风速。
[0097]
在本实施方式中,可以根据风电场的来流风速和风电场的大气边界层高度,采用基于边界层效应建立的边界层模型,获取风电场在充分发展状态下的当前风电机组的风轮高度处的第二平均风速。其中,充分发展状态是指风电场内流动的风速在风电场所在空间上沿流向呈现稳定的周期性变化状态。
[0098]
一个实施方式中,风电场在流向距离延续十倍大气边界层高度以上时,风电场边界层中的流动可以认为达到充分发展状态。
[0099]
一个实施方式中,可以根据以下公式(4)获取边界层模型:
[0100][0101]
其中,z
0,hi
为风电场的等效粗糙度,zh为风电场中风电机组的风轮高度,z
0,lo
为风电场的地表粗糙度,d为风电场中风电机组的风轮直径,κ为冯卡门常数,c
ft
和v
w*
为计算过程的中间值,c
ft
=πc
t
/(4s
x
sy),),s
x
和sy分别为风电场中相邻两台风电机组的流向距离和展向距离与风轮直径之比;流向距离是指相邻风电机组在风电场来流风向对应的方向上的距离;展向距离是指相邻风电机组在风电场来流风向的垂直方向上的距离。
[0102]
一个实施方式中,可以根据以下步骤s201-步骤s202获取风电场的地表粗糙度:
[0103]
步骤s201:任意选取风电场上游位置的两个高度,并分别获取两个高度处的平均风速;
[0104]
步骤s202:根据两个高度处的平均风速以及平均风速与地表粗糙度之间的关系,获取地表粗糙度;
[0105]
其中,风电场上游位置的任意高度处的平均风速与地表粗糙度之间的关系通过以下公式(5)确定:
[0106][0107]
其中,为风电场上游的任意位置的高度z处的平均风速,u
*lo
为风电场的地面摩擦速度。
[0108]
在本实施方式中,风电场中风轮高度处的平均来流风速可以通过测风雷达或测风塔获取,可以获取两个风轮高度处的平均来流风速,并根据公式(5)所示的平均来流风速与地表粗糙度之间的关系,联立方程,获取风电场的地表粗糙度。其中,风电场上游位置是指来流不受风电场影响的位置。
[0109]
一个实施方式中,步骤s1021可以进一步包括以下步骤:
[0110]
步骤s10211:根据风电场的来流风速获取风电场上游位置的高度zh处的平均来流风速。
[0111]
步骤s10212:根据高度zh处的平均来流风速并按照以下公式(6)获取风电场在充分发展状态下当前风电机组的风轮高度处的第二平均风速:
[0112][0113]
其中,为风电场在充分发展状态下当前风电机组的风轮高度zh处的第二平均风速,为高度zh处的平均来流风速,δ为大气边界层高度。
[0114]
在本实施方式中,可以根据风电场的来流风速,获取当前风电机组的风轮高度处的平均来流风速,并进一步根据公式(6)获取风电场充分发展后当前风电机组的风轮高度处的第二平均风速。
[0115]
步骤s1022:根据第二平均风速和以及预设的当前风电机组的功率曲线,获取第二预测功率;其中,功率曲线包括第二平均风速与第二预测功率的对应关系。
[0116]
在本实施方式中,可以根据第二平均风速以及预设的当前风电机组的功率曲线获取当前风电机组的第二预测功率。
[0117]
一个实施方式中,可以参阅附图3,根据步骤s1021中获取的第二平均风速,查询当前风电机组的功率曲线,获取当前风电机组的第二预测功率。
[0118]
一个实施方式中,在风电场充分发展状态下,风电场中的各个风电机组的第二平均风速是相同的,由第二平均风速获取的风电场中的各个风电机组的第二预测功率也是相同的。
[0119]
在本发明实施例的一个实施方式中,步骤s103可以进一步包括步骤s1031至步骤s1033:
[0120]
步骤s1031:根据风电场的来流风向,获取风电场的多排风电机组中不受尾流影响的风电机组作为首排风电机组,每个首排风电机组分别作为每列风电机组的第一台风电机组。
[0121]
在本实施方式中,风电场中的风电机组可以按照矩阵式排布方式进行排布,矩阵式排布方式将风电场中的风电机组在来流风向上划分为多排风电机组,矩阵式排布方式将风电场中的风电机组在来流风向的垂直方向上划分为多列风电机组。可以根据风电场的来流风向,获取风电场的多排风电机组中不受尾流影响的风电机组作为首排风电机组,并将每个首排风电机组分别作为每列风电机组的第一台风电机组。
[0122]
步骤s1032:当当前风电机组不是首排风电机组时,根据当前风电机组所在列的首排风电机组的第一预测功率和当前风电机组的第二预测功率,对当前风电机组的第一预测功率进行修正,以获取当前风电机组的最终预测功率。
[0123]
在本实施方式中,可以判断当前风电机组是否为首排风电机组,若否,则可以根据当前风电机组所在列的首排风电机组的第一预测功率和当前风电机组的第二预测功率,对当前风电机组的第一预测功率进行修正,以获取当前风电机组的最终预测功率。
[0124]
一个实施方式中,可以根据以下公式(7)计算当前风电机组的最终预测功率:
[0125]
p
tm2
=p
tm1
(p
t-p
tm1
)e-m
ꢀꢀ
(7)
[0126]
其中,p
tm2
为当前风电机组t的最终预测功率,p
tm1
为当前风电机组t的修正功率的中间值,p
t
为当前风电机组t的第一预测功率,m为对当前风电机组t产生尾流影响的其他风电机组的数量;
[0127]
中间值p
tm1
根据以下公式(8)计算获得:
[0128]
p
tm1
=p
∞
(p
0-p
∞
)e-m
ꢀꢀ
(8)
[0129]
p
∞
为当前风电机组t的第二预测功率,p0为当前风电机组t所在列的首排风电机组的第一预测功率。
[0130]
步骤s1033:当当前风电机组为首排风电机组时,直接将当前风电机组的第一预测功率作为当前风电机组的最终预测功率。
[0131]
在本实施方式中,若当前风电机组为首排风电机组,则可以直接将当前风电这就的第一预测功率作为当前风电机组的最终预测功率。即当前风电机组为首排风电机组时,基于尾流效应获取的第一预测功率是更为准确的,不需要进行修正。
[0132]
一个实施方式中,参阅附图2,图2是根据本发明实施例的一个实施方式的horns rev风电场机组排布示意图。如图2所示,在本实施方式中采用horns rev风电场作为示例,考虑西风这一来流风向,根据实测数据,风电场来流风速u
∞
=8m/s,来流湍流度i=7.7%,风电场的大气边界层高度δ=750m,地表粗糙度z
0,lo
=0.0002m,风电机组的风轮半径r=40m,推力系数c
t
=0.806,风轮直径d=80m,轮毂高度zh=70m,s
x
=7,sy=6.95。参阅附图4,图4是根据本发明实施例的一个实施方式的不同的风电场功率的预测方法对计算结果比对示意图,其中曲线1为根据实测数据获得的风电机组的归一化功率,曲线2为根据jensen尾流模型计算获得的风电机组的归一化功率,曲线3为根据本发明实施例的风电场功率预测方法计算获得的风电机组的归一化功率。如图4所示,相比传统尾流模型,本发明实施例的风电场功率预测方法的计算结果与实测数据更为接近,误差更小,说明该预测方法可实现风电场内各机组功率快速、简单、准确的预测。
[0133]
需要指出的是,尽管上述实施例中将各个步骤按照特定的先后顺序进行了描述,但是本领域技术人员可以理解,为了实现本发明的效果,不同的步骤之间并非必须按照这样的顺序执行,其可以同时(并行)执行或以其他顺序执行,这些变化都在本发明的保护范围之内。
[0134]
本领域技术人员能够理解的是,本发明实现上述一实施例的方法中的全部或部分流程,也可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一计算机可读存储介质中,该计算机程序在被处理器执行时,可实现上述各个方法实施例的步骤。其中,所述计算机程序包括计算机程序代码,所述计算机程序代码可以为源代码形式、对象代码形式、可执行文件或某些中间形式等。所述计算机可读存储介质可以包括:能够携带所述计算机程序代码的任何实体或装置、介质、u盘、移动硬盘、磁碟、光盘、计算机存储器、只读存储器、随机存取存储器、电载波信号、电信信号以及软件分发介质等。需要说明的是,所述计算机可读存储介质包含的内容可以根据司法管辖区内立法和专利实践的要求进行适当的增减,例如在某些司法管辖区,根据立法和专利实践,计算机可读存储介质不包括电载波信号和电信信号。
[0135]
进一步,本发明还提供了一种控制装置。在根据本发明的一个控制装置实施例中,
控制装置包括处理器和存储装置,存储装置可以被配置成存储执行上述方法实施例的风电场功率的预测方法的程序,处理器可以被配置成用于执行存储装置中的程序,该程序包括但不限于执行上述方法实施例的风电场功率的预测方法的程序。为了便于说明,仅示出了与本发明实施例相关的部分,具体技术细节未揭示的,请参照本发明实施例方法部分。该控制装置可以是包括各种电子设备形成的控制装置设备。
[0136]
进一步,本发明还提供了一种计算机可读存储介质。在根据本发明的一个计算机可读存储介质实施例中,计算机可读存储介质可以被配置成存储执行上述方法实施例的风电场功率的预测方法的程序,该程序可以由处理器加载并运行以实现上述风电场功率的预测方法。为了便于说明,仅示出了与本发明实施例相关的部分,具体技术细节未揭示的,请参照本发明实施例方法部分。该计算机可读存储介质可以是包括各种电子设备形成的存储装置设备,可选的,本发明实施例中计算机可读存储介质是非暂时性的计算机可读存储介质。
[0137]
进一步,应该理解的是,由于各个模块的设定仅仅是为了说明本发明的装置的功能单元,这些模块对应的物理器件可以是处理器本身,或者处理器中软件的一部分,硬件的一部分,或者软件和硬件结合的一部分。因此,图中的各个模块的数量仅仅是示意性的。
[0138]
本领域技术人员能够理解的是,可以对装置中的各个模块进行适应性地拆分或合并。对具体模块的这种拆分或合并并不会导致技术方案偏离本发明的原理,因此,拆分或合并之后的技术方案都将落入本发明的保护范围内。
[0139]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。