技术特征:
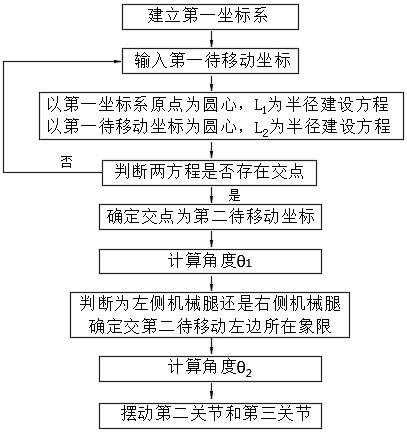
1.一种机器人腿部支撑算法,通过机器人实现,机器人包括底盘和两条以上的机械腿;机械腿对称设置在底盘两侧;所述机械腿包括第一关节、第二关节和第三关节;第一关节与底盘连接,第二关节与第一关节连接,第三关节与第二关节连接,第一关节带动第二关节和第三关节同步活动,第二关节带动第三关节同步活动,第三关节相对第二关节独立活动,其特征在于:包括以下步骤:步骤(1).以第一关节和第二关节的铰接处为原点建立第一坐标系;预设第一关节和第二关节铰接处与第二关节和第三关节铰接处之间的距离l1;预设第二关节和第三关节铰接处与第三关节末端之间的距离l2;步骤(2).输入第一待移动坐标;第一待移动坐标为第三关节末端的下一移动目标点;步骤(3).以原点(x1,y1)为圆心,l1为半径,得到第一方程(x-x1)2 (x-y1)2=l
12
;第一方程为第一关节的活动范围;以第一待移动坐标(x2,y2)为圆心,l2为半径,得到第二方程(x-x2)2 (y-y2)2=l
22
;第二方程为第三关节活动范围;步骤(4).判断第一关节的活动范围与第三关节的活动范围是否存在交点,若否,则判断第三关节末端移动到第一待移动坐标时,机械腿无法支撑机器人;若是,则判断第三关节末端移动到第一待移动坐标时,机械腿能够支撑机器人。2.根据权利要求1所述的一种机器人腿部支撑算法,其特征在于:步骤(4)中,若第一关节的活动范围与第三关节的活动范围是否存在交点;则进行步骤(5);步骤(5).将交点确定为第二待移动坐标;第二待移动坐标为第三关节末端移动到第一待移动坐标时,第二关节和第三关节铰接处所在坐标;步骤(5.1).沿机器人前进方向判断当前机械腿属于左侧机械腿还是右侧机械腿;若为左侧机械腿,则进行步骤(5.2);若为右侧机械腿,则进行步骤(5.3);步骤(5.2).判断交点所在象限;若为第一象限或第四象限,则第二关节和第三关节铰接处移动到第二待移动坐标时,机械腿无法支撑机器人;若若交点在第二象限或第三象限,则第二关节和第三关节铰接处移动到第二待移动坐标时,机械腿能够支撑机器人;步骤(5.3).判断交点所在象限;若为第二象限或第三象限,则第二关节和第三关节铰接处移动到第二待移动坐标时,机械腿无法支撑机器人;若为第一象限或第四象限,则第二关节和第三关节铰接处移动到第二待移动坐标时,机械腿能够支撑机器人。3.根据权利要求1所述的一种机器人腿部支撑算法,其特征在于:步骤(5)还包括:通过第二待移动坐标(x
m
,y
m
)和公式θ1=arc tan(|y
m-y1|,|x
m-x1|)计算θ1的角度;以第二关节与第一关节的平行方向为始边;第二关节上摆动为正方向;θ1为第三关节末端移动到第一待移动坐标时,第二关节与第一关节之间的角度。4.根据权利要求3所述的一种机器人腿部支撑算法,其特征在于:若存在两个交点,步骤(5)中分别计算不同交点对应θ1的角度数值;将角度数值小的θ1对应的交点作为第二待移动坐标。
技术总结
本发明提供一种机器人腿部支撑算法,以第一关节和第二关节的铰接处为圆心,第一关节和第二关节铰接处与第二关节和第三关节铰接处之间的距离为半径、以第三关节末端为圆心,第二关节和第三关节铰接处与第三关节末端之间的距离为半径分别建立方程;通过判断两个方程之间是否有交点从而判断第三关节能否对第二关节进行支撑;若两个方程之间没有交点,则表示第三关节末端移动到第一待移动坐标时,第三关节不能对第二关节进行支撑,进而机械腿不能对机器人进行支撑;若两个方程之间具有一个以上的交点,则表示第三关节末端移动到第一待移动坐标时,第三关节能对第二关节进行支撑,进而机械腿能对机器人进行支撑。而机械腿能对机器人进行支撑。而机械腿能对机器人进行支撑。
技术研发人员:缪文南 朱俊杰 周政 劳演 林恩泽 黄明杰
受保护的技术使用者:广州城市理工学院
技术研发日:2021.12.16
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。