技术特征:
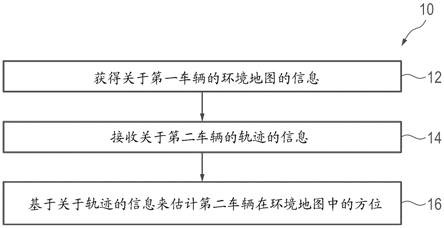
1.一种用于第一车辆(200;v1)并且用于在第一车辆(200;v1)处估计第二车辆(v2)的方位的方法(10),所述方法(10)包括:获得(12)关于第一车辆(200,v1)的环境地图的信息;接收(14)关于第二车辆(v2)的轨迹的信息;以及基于在环境地图中拟合关于所述轨迹的信息来估计(16)第二车辆(v2)在环境地图中的方位。2.根据权利要求1所述的方法(10),其中从第二车辆接收关于所述轨迹的信息。3.根据权利要求1或2中的一项所述的方法(10),其中关于所述轨迹的信息包括:关于第二车辆的计划路线的信息和关于第二车辆的期望轨迹的信息。4.根据权利要求1至3中的一项所述的方法(10),进一步包括:接收关于第二车辆的尺寸的信息,并且进一步基于关于第二车辆的尺寸的信息来估计第二车辆在环境地图中的方位。5.根据权利要求1至4中的一项所述的方法(10),进一步包括:接收关于第二车辆的所估计位置的信息,并且进一步基于关于第二车辆的所估计位置的信息来估计第二车辆在环境地图中的方位。6.根据权利要求1至5中的一项所述的方法(10),进一步包括:基于关于环境地图中的一个或多个对象的移动或位置的逻辑考虑来完善对第二车辆的方位的估计。7.根据权利要求6所述的方法(10),其中所述逻辑考虑包括对照预定街道地图进行评估。8.根据权利要求1至7中的一项所述的方法(10),其中所述估计(16)进一步基于与环境中的其他车辆或基础设施传送的消息。9.根据权利要求1至8中的一项所述的方法(10),其中环境地图基于高密度街道地图、使用第一车辆的传感器数据检测到的对象、以及从第一车辆的环境中的其他车辆接收到的具有环境内容的消息。10.根据权利要求1至9中的一项所述的方法(10),其中所述估计(16)包括:确定第二车辆在环境地图中的置信区域。11.根据权利要求10所述的方法(10),进一步包括:基于第一车辆(200;v1)的环境中的实际道路和/或交通情形来完善所述置信区域。12.根据权利要求1至11中的一项所述的方法(10),其中所述接收(12)包括:在来自第二车辆的机动协调消息或集体感知消息中接收关于第二车辆的轨迹的信息。13.一种具有程序代码的计算机程序,当在计算机、处理器或可编程硬件组件上执行所述计算机程序时,所述程序代码用于执行权利要求1至12的方法(10)中的至少一个。14.一种用于第一车辆(200;v1)并且用于在第一车辆(200;v1)处估计第二车辆(v2)的方位的装置(20),所述装置(20)包括:一个或多个接口(22),其被配置成传送消息;以及控制模块(24),其被配置成控制所述一个或多个接口(22),其中所述控制模块(24)进一步被配置成执行权利要求1至12的方法(10)之一。15.一种车辆(200;v1),包括权利要求14的装置(20)。
技术总结
实施例涉及用于第一车辆并且用于在第一车辆处估计第二车辆的方位的车辆、装置、方法和计算机程序。用于第一车辆(200;V1)并且用于在第一车辆(200;V1)处估计第二车辆(V2)的方位的方法(10)包括:获得(12)关于第一车辆(200;V1)的环境地图的信息;接收(14)关于第二车辆(V2)的轨迹的信息;以及基于关于所述轨迹的信息来估计(16)第二车辆(V2)在环境地图中的方位。的方位。的方位。
技术研发人员:A
受保护的技术使用者:大众汽车股份公司
技术研发日:2021.09.08
技术公布日:2022/3/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。