一种用于bim翻模的图像分割方法、电子设备及存储介质
技术领域
1.本发明涉及bim翻模技术领域,具体而言,涉及一种用于bim翻模的图像分割方法、电子设备及存储介质。
背景技术:
2.bim即建筑信息模型,是建筑工程领域的新工具,bim的核心是通过建立虚拟的建筑工程三维模型,利用数字化技术,为这个模型提供完整的、与实际情况一致的建筑工程信息库。该信息库不仅包含描述建筑物构件的几何信息、专业属性及状态信息,还包含了非构件对象的状态信息。借助这个包含建筑工程信息的三维模型,大大提高了建筑工程的信息集成化程度,从而为建筑工程项目的相关利益方提供了一个工程信息交换和共享的平台。
3.因此,近年来,随着bim技术的兴起,各种大型的建筑工程均开始使用bim技术对工程项目进行管理,这其中包括大型体育场馆、机场、火车站、汽车站、商城以及写字楼等;但是由于目前主流的设计图均由cad进行绘制,故而需要将cad绘制的二维设计图翻模为三维图像,而在翻模时,我们首先需要将设计图进行分割,在分别对其构件进行分类整合,才能将一个完整的设计图翻模出来。因此,图像分割是翻模过程中不可或缺的重要步骤。
4.但是在大型建筑工程中,设计图中的构件组成十分繁杂,现有的针对设计图的图像分割方法在遇到这种情况时,分割的准确性不高,并且分割的效率较低,难以满足大型建筑工程中设计图图像分割的要求。因此本技术期望提出一种能够实现快速且准确的图像分割方法。
技术实现要素:
5.本发明的目的在于提供一种用于bim翻模的图像分割方法、电子设备及存储介质,其能够对cad图像进行准确的分割,并且在运算时间以及收敛性方面具有较好的效果。
6.本发明的实施例通过以下技术方案实现:
7.第一方面,提供一种用于bim翻模的图像分割方法,包括如下步骤:
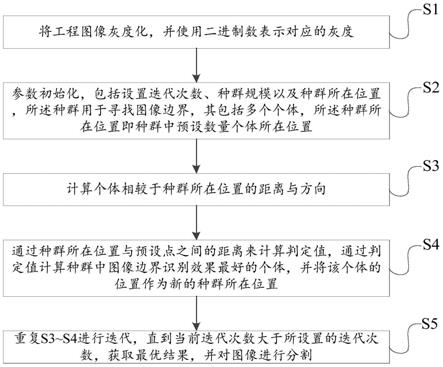
8.s1.将工程图像灰度化,并使用二进制数表示对应的灰度;
9.s2.参数初始化,包括设置迭代次数、种群规模以及种群所在位置,所述种群用于寻找图像边界,其包括多个个体,所述种群所在位置即种群中预设数量个体所在位置;
10.s3.计算个体相较于种群所在位置的距离与方向;
11.s4.通过种群所在位置与预设点之间的距离来计算判定值,通过判定值计算种群中图像边界识别效果最好的个体,并将该个体的位置作为新的种群所在位置;
12.s5.重复s3~s4进行迭代,直到当前迭代次数大于所设置的迭代次数,获取最优结果,并对图像进行分割。
13.进一步的,将s4中的所述预设点设置为原点,即所述判定值的取值空间与所述灰度的取值空间相同。
14.进一步的,所述使用二级制数表示对应的灰度具体为,将灰度图像分为2的n次幂
级灰度,并采用n位二进制数编码表示各级灰度值。
15.进一步的,所述s3具体为,通过预设的寻找步长与方向,以种群所在位置分别确定种群中的各个体相较于种群所在位置的距离与方向,如下式(1),
16.xi=x
axis
r,yi=y
axis
r
ꢀꢀꢀ
(1)
17.其中,x
axis
表示种群所在位置的横坐标,y
axis
表示种群所在位置的纵坐标,i表示种群中的第i个个体,0≤i≤种群中个体数,r为迭代步进值。
18.进一步的,s4中所述判定值通过个体位置与所述预设点之间的距离计算获取,如下式(2)(3),
[0019][0020]
si=1/diꢀꢀꢀ
(3)
[0021]
其中,di表示个体位置与所述预设点之间的距离,sprt表示开平方,x0表示预设点的横坐标,y0表示预设点的纵坐标,si表示判定值。
[0022]
进一步的,s4中通过判定值计算种群中图像边界识别效果最好的个体具体为,将判定值遗传算法中的适应度函数计算获取适应度值,以适应度值最大的个体作为种群中图像边界识别效果最好的个体。
[0023]
进一步的,s5中所述对图像进行分割具体为,采用一维最大熵的值作为适应度函数对图像进行分割。
[0024]
第二方面,提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述用于bim翻模的图像分割方法的步骤。
[0025]
第三方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述用于bim翻模的图像分割方法的步骤。
[0026]
本发明实施例的技术方案至少具有如下优点和有益效果:
[0027]
通过本技术的方法,可以在设计图组成复杂的大型建筑工程场景中,实现设计图图像的快速准备分割,并且该方法由于采用非十进制的方式表示灰度值,使得该方法运算速度更快,且收敛性更好。
附图说明
[0028]
图1为本发明提供的用于bim翻模的图像分割方法的流程示意图。
具体实施方式
[0029]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0030]
提供一种用于bim翻模的图像分割方法,如图1所示,包括如下步骤:
[0031]
s1.将工程图像灰度化,并使用二进制数表示对应的灰度,具体为,将灰度图像分为2的n次幂级灰度,并采用n位二进制数编码表示各级灰度值。
[0032]
在本技术中,优选的将灰度图像分为2的8次幂级灰度,即采用8位二进制数编码表
示各级灰度值,即00000000对应灰度值为0,11111111对应灰度值为255。
[0033]
s2.参数初始化,包括设置迭代次数、种群规模以及种群所在位置,所述种群用于寻找图像边界,其包括多个个体,所述种群所在位置即种群中预设数量个体所在位置。
[0034]
s3.计算个体相较于种群所在位置的距离与方向,具体为,通过预设的寻找步长与方向,以种群所在位置分别确定种群中的各个体相较于种群所在位置的距离与方向,如下式(1),
[0035]
xi=x
axis
r,yi=y
axis
r
ꢀꢀꢀ
(1)
[0036]
其中,x
axis
表示种群所在位置的横坐标,y
axis
表示种群所在位置的纵坐标,i表示种群中的第i个个体,0≤i≤种群中个体数,r为迭代步进值。
[0037]
s4.通过种群所在位置与预设点之间的距离来计算判定值,当预设点设置为原点时,则所述判定值的取值空间与所述灰度的取值空间相同;所述判定值通过个体位置与所述预设点之间的距离计算获取,如下式(2)(3),
[0038][0039]
si=1/diꢀꢀꢀ
(3)
[0040]
其中,di表示个体位置与所述预设点之间的距离,sprt表示开平方,x0表示预设点的横坐标,y0表示预设点的纵坐标,si表示判定值;通过判定值计算种群中图像边界识别效果最好的个体,具体为,将判定值遗传算法中的适应度函数计算获取适应度值,以适应度值最大的个体作为种群中图像边界识别效果最好的个体;并将该个体的位置作为新的种群所在位置。
[0041]
s5.重复s3~s4进行迭代,直到当前迭代次数大于所设置的迭代次数,获取最优结果,并对图像进行分割,具体为,采用一维最大熵的阈值作为适应度函数对图像进行精准的分割。
[0042]
对于采用最大熵阈值分割的原理如下:
[0043]
给定一个特定的阈值q(0<=q<k-1),对于该阈值所分割的两个图像区域c0,c1,其估算的概率密度函数可表示为如下式(4)、(5)、(6)、(7):
[0044][0045][0046][0047][0048]
p0(q),p1(q)分别表示的是q阈值分割的背景和前景像素的累计概率,两者之和为1。背景和前景对应的熵表示如下式(8)、(9):
[0049]
[0050][0051]
在该阈值下,图像总熵为下式(10):
[0052]
h(q)=h0(q) h1(q)
ꢀꢀꢀ
(9)
[0053]
计算所有分割阈值下的图像总熵,找到最大的熵,将最大熵对应的分割阈值作为最终的阈值,图像中灰度大于此阈值的像素作为前景,否则作为背景。
[0054]
分割阈值的选取是困难的,我们在算法中选取了256个分割阈值,也就是256级灰度,从第1级灰度一直计算到第256级灰度,因此有256个图像总熵,找到最大的总熵及其位置。
[0055]
另,本技术提供一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述用于bim翻模的图像分割方法的步骤。
[0056]
本技术还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述用于bim翻模的图像分割方法的步骤。
[0057]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
