一种基于机器人的表计读数识别方法
【技术领域】
1.本技术涉及计算机技术领域,尤其涉及一种基于机器人的表计读数识别方法。
背景技术:
2.在工业化生产场景中会存在大量的计量表计,由于表计的应用广泛,如温度计、压力计、液位计等。随着数字化应用的进程推进,要求对计量表计实现数字化抄表读数,目前表计自动巡查大部分通过加装定制摄像头实现表计定时读取,此类技术方案存在设备安装工作量大,维护繁琐,点位扩展性不强。
技术实现要素:
3.本发明的目的在于提供一种基于机器人的表计读数识别方法,实现多点位、多场景、多类型表计读数识别。
4.本发明提供了一种基于机器人的表计读数识别方法,包括如下步骤:
5.s1,由机器人收集表计的样本图像数据;
6.s2,对样本图像数据进行清洗、标注;
7.s3,通过深度学习算法训练样本图像数据,获得表计读数识别模型;
8.s4,由机器人巡检,收集表计的巡检图像数据;
9.s5,自动调用表计读数识别模型,计算得出表计当前的读数。
10.进一步地,所述步骤s1包括如下步骤:
11.s11,通过机器人巡检配置工具,对厂区内需要自动巡检的表计进行点位配置;
12.s12,机器人依据图像识别调整机器人位姿和/或调整摄像头方向,使得摄像头中心与表计中心对应;
13.s13,机器人拍摄至少一张表计图像,并记录拍摄时对应的机器人位姿数据。
14.进一步地,所述步骤s2中标注包括对表计类别进行标注。
15.进一步地,所述步骤s2中标注包括对表计最大量程、表计最小量程进行标注。
16.进一步地,所述步骤s2中对样本图像数据进行清洗包括对样本图像数据进行比例变换、旋转变换、位移变换、光线变换和图像合成。
17.进一步地,所述步骤s3进行深度学习时,在多张表计图像中选择出最精确的图像作为巡检点样本图像。
18.进一步地,所述步骤s3中表计读数识别模型包括用于识别表计类型的表计类型自动识别模型;在机器人巡检时,先调用表计类型自动识别模型识别表计类型,再对表计进行拍照,收集图像数据;
19.进一步地,所述步骤s5表计读数识别模型采用霍夫变换检测直线,提取指针图像,通过最小二乘法拟合指针与最大量程和表计最小量程的角度,结合识别出的表计最大量程和表计最小量程,计算出表计当前读数。
20.进一步地,所述采用霍夫变换检测直线之前,先依据巡检点样本图像特征校准机
器人云台位置,使得巡检图像与巡检点样本图像采集位置一致。
21.进一步地,还包括:
22.s6,将表计当前读数反馈至业务管理后台,由警告预警模块进行表计读数异常校验;所述表计读数异常指表计当前读数不在该表计允许的范围内;
23.s7,当表计读数异常时,进行人工校验,当表计实际结果与表计读数识别模型反馈的结果不一致时,将图像数据标注,并加入样本图像数据,重复步骤s2至s3来训练更新表计读数识别模型。
24.与现有技术相比,本技术有如下优点:
25.通过深度学习建立表计读数识别模型,通过机器人实时巡检,自动调用表计读数识别模型,准确识别表计种类,计算表计当前读数;实现多点位、多场景、多类型表计读数识别;减少人工抄表可能的疏漏,有效降低劳动强,降低电厂运维成本;并依据异常校验更新样本图像数据,提高算法的鲁棒性。
【附图说明】
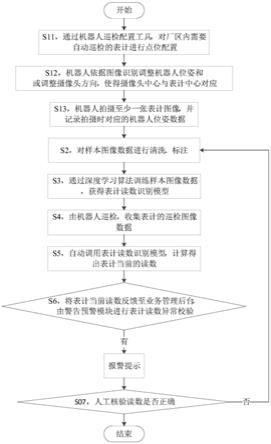
26.图1为本发明基于机器人的表计读数识别方法的流程图。
【具体实施方式】
27.为让本发明的上述特征和优点能更明显易懂,下文特举实施例,并配合附图,作详细说明如下,但本发明并不限于此。
28.如图1所示,一种基于机器人的表计读数识别方法,包括如下步骤:
29.s1,由机器人收集表计的样本图像数据;具体包括,
30.s11,通过机器人巡检配置工具,对厂区内需要自动巡检的表计进行点位配置;配置表计所在的具体位置;
31.s12,机器人依据图像识别调整机器人位姿和/或调整摄像头方向,使得摄像头中心与表计中心对应;通过识别表计面板四周和指针,计算出表计中心点,调整机器人位姿和/或调整摄像头方向,使得摄像头轴心与表计中心重合,保证拍摄的图片指针无偏斜;机器人拍摄表计的方向非常重要,如有角度偏差容易造成读数误差大。
32.s13,机器人拍摄至少一张表计图像,并记录拍摄时对应的机器人位姿数据;机器人可拍摄多张表计图像,同时记录拍摄时对应的机器人位姿数据,进行深度学习时,在多张表计图像中选择出最精确的图像作为巡检点样本图像,机器人巡检收集表计的图像数据时采用巡检点样本图像对应的机器人位姿;
33.s2,对样本图像数据进行清洗、标注;对表计类别、表计最大量程和表计最小量程进行标注;对样本图像数据进行比例变换、旋转变换、位移变换、光线变换和图像合成;比例变换改变图像尺寸,即长和宽,可以按照比例即按照长宽比来改变图像大小,也可以不按照图像长宽比按照需求来放大或者缩小图像;旋转变换将图像上所有的点都绕一个固定的点换同一方向,转动同一个角度;位移变换将图像所有的像素坐标分别加上指定的水平偏移量和垂直偏移量;光线变换调整图像的明亮度;图像合成将对角度的图像进行融合;最终得到统一标准的图像。
34.s3,通过深度学习算法训练样本图像数据,获得表计读数识别模型;表计读数识别
模型包括用于识别表计类型的表计类型自动识别模型,表计类型自动识别模型通过特征提取和分类算法得出每种表计的特征,可快速识别表计类型;表计读数识别模型通过巡检点样本图像对巡检图像进行图像校准,采用霍夫变换检测直线,提取指针图像,通过最小二乘法拟合指针与最大量程和表计最小量程的角度,结合识别出的表计最大量程和表计最小量程,计算出表计当前读数。
35.s4,由机器人巡检,收集表计的图像数据;在机器人巡检时,先调用表计类型自动识别模型识别表计类型,可以快速定位表计区域,快速找到表计中心,对表计进行正面拍照,收集图像数据;并去除图像干扰信息;保证图像数据清洗、完整、无偏斜;根据巡检点样本图像特征校准机器人云台位置,使得采集图像与巡检点样本图像位置保持一致。
36.s5,自动调用表计读数识别模型,表计读数识别模型通过巡检点样本图像对巡检图像进行图像校准,采用霍夫变换检测直线,提取指针图像,通过最小二乘法拟合指针与最大量程和表计最小量程的角度,结合识别出的表计最大量程和表计最小量程,计算出表计当前读数。
37.s6,将计算出的表计当前读数反馈至业务管理后台,由警告预警模块进行表计读数异常校验;所述表计读数异常指表计当前读数不在该表计允许的范围内。
38.s7,当表计读数异常时,进行人工校验,当表计实际结果与表计读数识别模型反馈的结果不一致时,将图像数据标注,并加入样本图像数据,重复步骤s2至s3来训练更新表计读数识别模型。
39.本方法的另一实施例
40.s1,由机器人收集表计的样本图像数据;具体包括,
41.s11,通过机器人巡检配置工具,对厂区内需要自动巡检的表计进行点位配置,同时配置表计最大量程和最小量程;
42.s12,机器人依据图像识别调整机器人位姿和/或调整摄像头方向,使得摄像头中心与表计中心对应;
43.s13,机器人拍摄至少一张表计图像,并记录拍摄时对应的机器人位姿数据;
44.s2,对样本图像数据进行清洗、标注;对表计类别进行标注;。
45.s3,通过深度学习算法训练样本图像数据,获得表计读数识别模型;
46.s4,由机器人巡检,收集表计的图像数据;
47.s5,自动调用表计读数识别模型,表计读数识别模型通过巡检点样本图像对巡检图像进行图像校准,采用霍夫变换检测直线,提取指针图像,通过最小二乘法拟合指针与最大量程和表计最小量程的角度,结合识别出的表计最大量程和表计最小量程,计算出表计当前读数。
48.s6,将计算出的表计当前读数反馈至业务管理后台,由警告预警模块进行表计读数异常校验;所述表计读数异常指表计当前读数不在该表计允许的范围内。
49.s7,当表计读数异常时,进行人工校验,当表计实际结果与表计读数识别模型反馈的结果不一致时,将图像数据标注,并加入样本图像数据,重复步骤s2至s3来训练更新表计读数识别模型。
50.当某一类表计数量较大时,可直接通过机器人巡检配置工具配置该类表计的最大量程和表计最小量程,计算表计当前的读数时,直接采用配置数据中的最大量程和表计最
小量程,无需模型识别表计最大量程和表计最小量程,这样可以大幅减少计算量,同时也未增加很多的人工作量。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。