1.本发明属于无损检测技术领域,涉及声发射时差定位检测技术,特别涉及一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法。
背景技术:
2.低温钛合金气瓶是运载火箭、卫星、飞船等航天飞行器发动机系统的主要增压部件,气瓶工作环境为超低温环境(-253℃),具有工作压力高、质量轻、比强度高、设计安全系数小、可靠性要求高、工作环境恶劣等特点。声发射检测技术的动态无损检测特性可有效避免气瓶将危害性缺陷带入飞行过程,为了保障型号飞行安全,需要在液氮中(-196℃)逐一对钛合金气瓶的整体完整性进行测量和监测。获得二维平面定位信息并在定位信息基础上进行声发射活性和强度分析是准确实现钛合金气瓶超低温环境下声发射损伤严重性实时评价的重要前提。
3.利用最新的光纤环声发射传感技术,可以不借助波导装置,在不低于液氢温度(-253℃)的液体环境下实现对钛合金气瓶的多通道信号采集,这为实现超低温液体环境下的声发射二维平面定位创造了条件。
4.研究发现,在超低温液体环境下进行声发射二维平面定位,需要克服声发射信号传播模式和传播路径复杂、干扰噪声强度大、声发射波速漂移、声速测量干扰多、计算间距难以确定等困难。目前还没有形成超低温液体环境下声发射二维平面定位方法。
技术实现要素:
5.为了克服当前钛合金气瓶超低温声发射检测无法对声发射信号准确定位的不足,本发明人进行了锐意研究,提供了一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,首先通过中心频率、持续时间以及能量等前端滤波器,剔除因超低温液体环境沸腾、声发射波传播模态和传播路径复杂而产生的反射、折射等高强度干扰噪声,再基于声发射时差定位原理,根据试验过程中的环境噪声水平、增益、检测门槛及其定位阵列形式和气瓶结构尺寸等,结合气瓶金属壁声发射波传播模态特征,给出声速、闭锁距离、过定位间距等定位参数的修正方法,从而实现真正危害性缺陷的准确定位。该方法方便可靠、易操作,定位误差不大于相邻传感器间距的5%。
6.本发明提供的技术方案如下:
7.一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,包括如下步骤:
8.s1:在气瓶表面分层布置足够数量的声发射传感器,其中至少两个声发射传感器位于气瓶赤道焊缝两侧;
9.s2:设置综合滤波器,根据中心频率、持续时间及能量要求范围,剔除因超低温液体环境沸腾、声发射波传播模态和传播路径复杂而产生的反射、折射等不符合要求的高强度干扰噪声,将满足中心频率、持续时间及能量要求范围的声发射信号保留并定位;
10.s3:设置超低温状态下的增益、声发射检测门槛和常温下的定位参数,将声发射信号按增益放大后与声发射检测门槛比较,过滤非目标声发射信号;根据常温定位参数确定超低温状态下的定位参数;
11.s4:根据常温下测得传感器布置位置、气瓶结构尺寸以及定位参数,按照超低温液体环境下气瓶金属壁声发射波传播模态特征和衰减量进行综合修正,获得超低温状态下的定位参数;
12.s5:顺序执行完毕上述步骤,基于声发射时差定位原理,结合超低温定位参数,实施超低温液体环境下的钛合金气瓶声发射检测即可实现钛合金气瓶声发射信号的二维平面定位。
13.根据本发明提供的一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,具有以下有益效果:
14.(1)根据本发明提供的一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,通过设置采集信号中心频率范围、持续时间及能量幅值,利用前端滤波器滤除了超低温液体环境沸腾、声发射波传播模态和传播路径复杂而产生的反射、折射等高强度干扰噪声,提高了信号采集准确度;
15.(2)根据本发明提供的一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,通过对不同测量间距下得到的声速并进行修正得到钛合金气瓶在常温环境下声发射检测的声速,并通过结合气瓶金属壁声发射波传播模态特征,给出了声速、闭锁距离、过定位间距等定位参数在超低温液体环境下的修正方法;
16.(3)根据本发明提供的一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,针对钛合金气瓶超低温液体环境下声发射信号难以准确定位问题,基于钛合金气瓶结构及声发射波传播特点成功实现了在超低温液体环境下对钛合金气瓶的二维平面定位,该方法可以给出与损伤相关的声发射信号在钛合金气瓶上的准确二维位置,最大偏差不大于5%传感器间距,这为实现钛合金气瓶超低温环境下声发射损伤严重性实时评价提供了重要数据支撑。
附图说明
17.图1为20l球形钛合金气瓶声发射检测示意图;
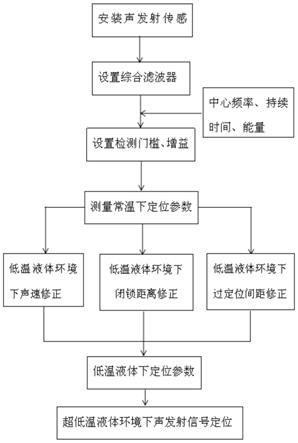
18.图2为本发明流程图;
19.图3为传感器及在赤道焊缝处附近模拟声源的定位效果图。
具体实施方式
20.下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
21.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
22.本发明提供了一种超低温液体环境下的钛合金气瓶声发射二维平面定位方法,该方法首先通过中心频率、持续时间以及能量等前端滤波器,剔除因超低温液体环境沸腾、声
发射波传播模态和传播路径复杂而产生的反射、折射等高强度干扰噪声,再基于声发射时差定位原理,根据试验过程中的环境噪声水平、增益、检测门槛及其定位阵列形式和气瓶结构尺寸等,结合气瓶金属壁声发射波传播模态特征,给出声速、闭锁距离、过定位间距等定位参数的修正方法,从而实现钛合金气瓶在超低温液体环境下的二维平面定位。具体包括如下步骤:
23.s1:在气瓶表面分层布置足够数量的声发射传感器,其中至少两个声发射传感器位于气瓶赤道焊缝两侧;
24.s2:设置综合滤波器,根据中心频率、持续时间及能量要求范围,剔除因超低温液体环境沸腾、声发射波传播模态和传播路径复杂而产生的反射、折射等不符合要求的高强度干扰噪声,将满足中心频率、持续时间及能量要求范围的声发射信号保留并定位;
25.s3:设置超低温状态下的增益、声发射检测门槛和常温下的定位参数,将声发射信号按增益放大后与声发射检测门槛比较,过滤非目标声发射信号;根据常温定位参数确定超低温状态下的定位参数;
26.s4:根据常温下测得传感器布置位置、气瓶结构尺寸以及定位参数,按照超低温液体环境下气瓶金属壁声发射波传播模态特征和衰减量进行综合修正,获得超低温状态下的定位参数;
27.s5:顺序执行完毕上述步骤,基于声发射时差定位原理,结合超低温定位参数,实施超低温液体环境下的钛合金气瓶声发射检测即可实现钛合金气瓶声发射信号的二维平面定位,定位误差不大于相邻传感器间距的5%。
28.在一种优选的实施方式中,所述步骤s1中,按照相邻传感器间距不大于球面周长的二分之一,亦不小于球面周长的八分之一的间隔在气瓶表面分层布置足够数量的声发射传感器。
29.在一种优选的实施方式中,所述步骤s2中,所述中心频率设置为200~450hz,持续时间为10~5000μs,能量为100-1500。
30.在一种优选的实施方式中,所述步骤s2中,按照设定的逻辑规则,将满足中心频率、持续时间及能量要求范围的声发射信号保留并定位,所述逻辑规则包括:声发射信号需满足中心频率为200~450hz且持续时间为10~5000μs或中心频率为200~450hz且能量为100~1500。
31.在一种优选的实施方式中,所述步骤s3中,定位参数包括声速、闭锁距离以及过定位间距。其中,常温下的声速通过以下方式确定:
32.测量常温下空气中的三个不同传感器间距之间的声速,最小传感器间距a1时声速为v1,传感器间距a2时声速为v2,跨越焊缝的最大传感器间距a3时声速为v3,对测量得到的3组声速值进行处理,得到常温空气下的声速
33.在一种优选的实施方式中,所述步骤s3中,所述增益设置为40db,将采集的声发射信号放大100倍。
34.确定在超低温状态下的声发射检测门槛,检测门槛采用下式确定:
35.t=asl
max
25db
36.式中,t为检测门槛,as
max
为采集信号100s内测量的平均信号电平最大值。
37.在一种优选的实施方式中,所述步骤s4中,超低温状态下的声速通过以下方式确定:
38.v=k
·v常温2
39.其中,k为修正因子,ρ为钛合金气瓶密度,σ为钛合金气瓶常温下泊松比,e为钛合金气瓶常温下杨式模量,v
常温
为常温下测试的声速,t
液
为超低温液体环境温度,t
常温
为室温温度。
40.超低温状态下的闭锁距离,通过以下方式确定:测量传感器间距的最大值为a,则闭锁距离a’为:
41.超低温状态下的过定位间距,通过以下方式确定:测量传感器间距的最大值为a,则过定位间距b为:
42.其中,t
液
为超低温液体环境温度,t
常温
为室温温度,a传感器间距的最大值,a’为闭锁距离,b为过定位间距。
43.实施例1
44.液氮环境下的20l球形钛合金气瓶(以下简称气瓶)声发射二维平面定位方法;图1为气瓶声发射传感器安装及检测示意图;按照图2流程图该方法的具体步骤为:
45.步骤s1:本实施例中的气瓶(球面周长为1224mm),按照相邻传感器间距不大于612mm,亦不小于153mm的间隔在气瓶表面分层布置4个声发射传感器,形成矩形平面定位阵列,并牢牢固定;
46.步骤s2:设置综合滤波器,根据中心频率、持续时间及能量要求范围(中心频率在200~450hz,持续时间为10~5000μs,能量为100~1500),按照声发射信号需满足中心频率为200~450hz且持续时间为10~5000μs或中心频率为200~450hz且能量为100~1500的逻辑规则,将满足上述特征的声发射信号保留并进行定位运算,以剔除因超低温液体环境沸腾、声发射波传播模态和传播路径复杂而产生的反射、折射等高强度干扰噪声;
47.步骤s3:综合考虑液氮低温环境下信号峰值幅度,将增益设置为40db,通过在信号传播线路上增加前置放大器实施;在声发射信号特征参数中,上升时间、下降时间、持续时间、振铃计数等参数的表征均取决于门槛电平与信号的交点位置。因此检测门槛值的高低会对这些参数值的大小带来直接的影响,通过采集信号100s内测量的平均信号电平最大值为20db,根据平均信号电平最大值设置检测门槛为45db;将声发射信号按增益放大后,在声
发射处理器中与声发射检测门槛比较,过滤非目标声发射信号;根据常温定位参数确定超低温状态下的定位参数;
48.步骤s4:为了实现液氮低温环境下钛合金气瓶声发射信号准确定位,需要确定液氮下声波的声速,由于液氮下声波传播复杂,测量声发射波速漂移、声速测量干扰多、计算间距难以确定,因此通过测量常温下声波速度并进行修正得到液氮下声波的声速。测量常温下在空气中的三个不同传感器间距之间的声速,最小传感器间距306mm时声速为3100m/s,传感器间距315mm时声速为3088m/s,跨越焊缝的最大传感器间距610mm时声速为3064m/s,对测量得到的3组声速值进行处理,得到常温下声速:
[0049][0050]
根据常温下测得传感器布置位置、气瓶结构尺寸以及声速等定位参数,按照超低温液体环境下气瓶金属壁声发射波传播模态特征和衰减量进行综合修正,利用得到的常温下声速v
常温
,同时测量常温下温度为t
常温
=298.15k,超低温液体环境温度为t
液
=80.15k,测得常温下钛合金气瓶密度ρ=4.45g/cm3,钛合金气瓶泊松比σ=0.33,钛合金气瓶杨式模量e=118gpa,则超低温液体介质中的声速v为:
[0051][0052]
对闭锁距离及过定位间距进行修正:测量传感器间距的最大值为610mm,则闭锁距离a’为
[0053]
过定位间距b为
[0054]
将修正后的声速v、闭锁间距a’,过定位间距b设定为定位参数;
[0055]
步骤s5:完成上述步骤后,进行钛合金气瓶低温声发射实验,基于声发射时差定位原理,结合超低温定位参数,实施超低温液体环境下的钛合金气瓶声发射二维平面定位。靠近传感器及在赤道焊缝处的模拟声源的声发射定位效果图见图3,定位精度均达到了不大于相邻传感器间距的5%。
[0056]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
[0057]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。