1.本发明涉及一种水泥块清理装置,尤其涉及一种建筑用模板水泥块清理装置。
背景技术:
2.建筑模板是一种临时性支护结构,按设计要求制作,使混凝土结构、构件按规定的位置、几何尺寸成形,保持其正确位置,并承受建筑模板自重及作用在其上的外部荷载,进行模板工程的目的,是保证混凝土工程质量与施工安全、加快施工进度和降低工程成本,浇混凝土结构施工用的建筑模板,是保证混凝土结构按照设计要求浇筑混凝土成形的一种临时模型结构,它要承受混凝土结构施工过程中的水平荷载和竖向荷载。
3.建筑模板是混凝土浇筑成形的模壳和支架,所以在浇筑工作完成后,建筑模板上将会留有许多水泥块,这将会影响下一次的浇筑工作,所以人们需要对建筑模板进行清理,人们需要借助工具对水泥块刮落,随后还需要人们手动将清水喷洒在模板上,同时还需要对水泥块和废水进行清理,这样不仅增加工作量,同时加快对体力的消耗。
4.为此,我们设计了一种实现自动刮落水泥块、自动喷洒清水和自动擦拭清水的建筑用模板水泥块清理装置。
技术实现要素:
5.为了克服传统模板水泥块清理装置无法自动刮落水泥块、无法自动喷洒清水和无法自动擦拭清水的缺点,本发明提供一种实现自动刮落水泥块、自动喷洒清水和自动擦拭清水的建筑用模板水泥块清理装置。
6.本发明是这样实现的,一种建筑用模板水泥块清理装置,包括:支撑座,支撑座上设有刮出机构;第一转轴,刮出机构上转动式设有第一转轴;刮刀,第一转轴上设有刮刀;移动机构,支撑座下侧设有移动机构;卡位机构,支撑座上设有卡位机构;推料机构,支撑座上设有推料机构。
7.可选地,还包括:导向杆,支撑座内部两侧均设有导向杆;第一滑块,两根导向杆上均滑动式设有第一滑块;第一减速电机,一侧的第一滑块上安装有第一减速电机,第一减速电机输出轴与第一转轴连接;光敏传感器,支撑座上设有光敏传感器。
8.可选地,移动机构包括:第一轴承座,支撑座上两侧均设有第一轴承座;第二转轴,两个第一轴承座中部均转动式设有第二转轴;
第一导向轮,两根第二转轴上均设有第一导向轮;第二轴承座,支撑座下部两侧均设有第二轴承座;第三转轴,两个第二轴承座上均转动式设有第三转轴;第二导向轮,两根第三转轴中部均设有第二导向轮;第一支撑架,支撑座下部设有第一支撑架;第二减速电机,第一支撑架上部安装有第二减速电机;第四转轴,第二减速电机输出轴上连接有第四转轴,第四转轴与第一支撑架转动式连接;第一绕线轮,第四转轴上两侧均设有第一绕线轮;拉绳,第一绕线轮与第一滑块之间连接有拉绳,拉绳数量为两根,拉绳与第一导向轮和第二导向轮滑动式连接;连接块,两个第一滑块上部之间连接有连接块;第一固定块,支撑座上部设有第一固定块,第一固定块与连接块滑动式连接;第一弹簧,第一固定块上绕有第一弹簧,第一弹簧两端分别与连接块和第一固定块连接。
9.可选地,卡位机构包括:距离传感器,支撑座上设有距离传感器;第二支撑架,支撑座中部设有第二支撑架;第一电动推杆,第二支撑架中部安装有第一电动推杆;挡料块,第一电动推杆伸缩杆上连接有挡料块。
10.可选地,推料机构包括:滑槽,支撑座上两侧均设有滑槽;第二滑块,两个滑槽之间滑动式连接有第二滑块;伸缩杆,第二滑块上两侧均设有伸缩杆;楔形块,两根伸缩杆顶端均设有楔形块;第二弹簧,两根伸缩杆上均绕有第二弹簧,第二弹簧两端分别与第二滑块和伸缩杆连接;第三支撑架,支撑座上设有第三支撑架;第三减速电机,第三支撑架上部安装有第三减速电机;第三轴承座,支撑座中部设有第三轴承座;第五转轴,第三轴承座上部转动式设有第五转轴,第五转轴与第三减速电机输出轴连接;第二绕线轮,第五转轴上设有第二绕线轮,第二绕线轮与第二滑块连接;第二固定块,支撑座上两侧均设有第二固定块,第二固定块与第二滑块滑动式连接;第三弹簧,两个第二固定块上均绕有第三弹簧,第三弹簧两端分别与第二固定块和第二滑块连接。
11.作为本发明的一种优选的技术方案,清洁机构包括:第四支撑架,支撑座上两侧均设有两个第四支撑架;
水箱,四个第四支撑架之间连接有水箱;第五支撑架,支撑座上两侧均设有两个第五支撑架;导流管,同侧的两个第五支撑架之间连接有导流管;电磁阀,两根导流管上部均设有电磁阀。
12.作为本发明的一种优选的技术方案,擦料机构包括:水流量传感器,一侧的导流管上设有水流量传感器;第六支撑架,支撑座中部设有第六支撑架;第二电动推杆,第六支撑架中部安装有第二电动推杆;第三固定块,支撑座上两侧均设有第三固定块;滑杆,两个第三固定块上均滑动式设有滑杆;擦料板,两根滑杆之间连接有擦料板;第四弹簧,两根滑杆上均绕有第四弹簧,第四弹簧两端分别与第三固定块和擦料板连接。
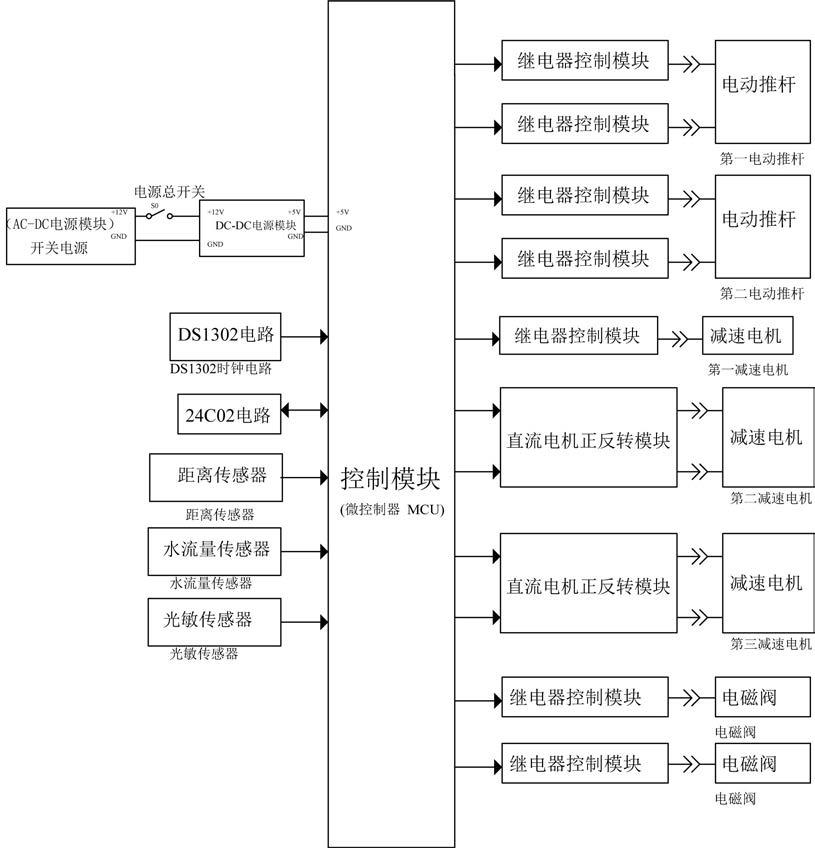
13.作为本发明的一种优选的技术方案,支撑座上侧中部安装有控制箱,控制箱内安装有开关电源、控制模块和电源模块,开关电源为建筑用模板水泥块清理装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;光敏传感器、距离传感器和水流量传感器均与控制模块通过电性连接,第一减速电机、第一电动推杆、第二电动推杆和电磁阀均与控制模块通过继电器控制模块连接,第二减速电机和第三减速电机均与控制模块通过直流电机正反转模块连接。
14.本发明提供了一种建筑用模板水泥块清理装置。具备以下有益效果:1、本发明通过第一滑块带动第一减速电机、第一转轴和刮刀向前运动,使得刮刀对模块上的水泥块进行刮落,实现刮刀刮落水泥块效果;2、本发明通过控制模块控制第一电动推杆伸缩杆静止,使得挡料块对模板进行卡位,防止模板发生位置偏移,实现挡料块卡位模板效果;3、本发明通过电磁阀打开导流管通道,清水通过水箱流入导流管中,清水再通过导流管喷洒在模板上,清水对刮落的水泥块进行清洗,实现清水清洗水泥块效果;4、本发明通过擦料板带动滑杆向下运动,第四弹簧被拉伸,擦料板向下运动到与模板接触后,擦料板对模板上残留的清水进行擦拭,实现擦料板擦拭残留清水效果。
附图说明
15.图1为本发明的立体结构示意图。
16.图2为本发明去除支撑座后的立体结构示意图。
17.图3为本发明的刮出机构剖面立体结构示意图。
18.图4为本发明的移动机构剖面立体结构示意图。
19.图5为本发明的卡位机构剖面立体结构示意图。
20.图6为本发明的推料机构第一视角剖面立体结构示意图。
21.图7为本发明的推料机构第二视角剖面立体结构示意图。
22.图8为本发明的清洁机构剖面立体结构示意图。
23.图9为本发明的擦料机构剖面立体结构示意图。
24.图10为本发明的电路框图。
25.图11为本发明的电路原理图。
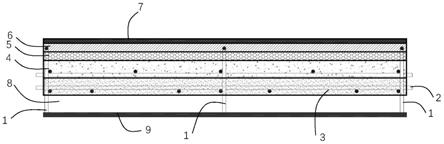
26.图中附图标记的含义:1:支撑座,2:控制箱,3:刮刀,4:第一转轴,5:刮出机构,51:导向杆,52:第一滑块,53:第一减速电机,54:光敏传感器,6:移动机构,61:第一轴承座,62:第二转轴,63:第一导向轮,64:第二轴承座,65:第三转轴,66:第二导向轮,67:第一支撑架,68:第二减速电机,69:第一绕线轮,610:第四转轴,611:拉绳,612:连接块,613:第一固定块,614:第一弹簧,7:卡位机构,71:距离传感器,72:第二支撑架,73:第一电动推杆,74:挡料块,8:推料机构,81:滑槽,82:第二滑块,83:伸缩杆,84:第二弹簧,85:楔形块,86:第三支撑架,87:第三减速电机,88:第三轴承座,89:第二绕线轮,810:第五转轴,811:第二固定块,812:第三弹簧,9:清洁机构,91:第四支撑架,92:水箱,93:第五支撑架,94:导流管,95:电磁阀,10:擦料机构,101:水流量传感器,102:第六支撑架,103:第二电动推杆,104:第三固定块,105:滑杆,106:第四弹簧,107:擦料板。
具体实施方式
27.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
28.请参阅图1-图11,本发明提供一种技术方案:一种建筑用模板水泥块清理装置,包括有支撑座1、刮刀3、第一转轴4、刮出机构5、移动机构6、卡位机构7和推料机构8,支撑座1上设有刮出机构5,刮出机构5上转动式设有第一转轴4,第一转轴4上设有刮刀3,支撑座1下侧设有移动机构6,支撑座1后侧设有卡位机构7,支撑座1上设有推料机构8。
29.刮出机构5包括有导向杆51、第一滑块52、第一减速电机53和光敏传感器54,支撑座1内部左右两侧均设有导向杆51,两根导向杆51上均滑动式设有第一滑块52,右侧的第一滑块52上安装有第一减速电机53,第一减速电机53输出轴与第一转轴4连接,支撑座1后部右侧设有光敏传感器54。
30.移动机构6包括有第一轴承座61、第二转轴62、第一导向轮63、第二轴承座64、第三转轴65、第二导向轮66、第一支撑架67、第二减速电机68、第一绕线轮69、第四转轴610、拉绳611、连接块612、第一固定块613和第一弹簧614,支撑座1前部左右两侧均设有第一轴承座61,两个第一轴承座61中部均转动式设有第二转轴62,两根第二转轴62上均设有第一导向轮63,支撑座1下部左右两侧均设有第二轴承座64,两个第二轴承座64上均转动式设有第三转轴65,两根第三转轴65中部均设有第二导向轮66,支撑座1前侧下部设有第一支撑架67,第一支撑架67上部后侧安装有第二减速电机68,第二减速电机68输出轴上连接有第四转轴610,第四转轴610与第一支撑架67转动式连接,第四转轴610前后两侧均设有第一绕线轮69,第一绕线轮69与第一滑块52之间连接有拉绳611,拉绳611数量为两根,拉绳611与第一导向轮63和第二导向轮66滑动式连接,两个第一滑块52上部之间连接有连接块612,支撑座1上部设有第一固定块613,第一固定块613与连接块612滑动式连接,第一固定块613上绕有第一弹簧614,第一弹簧614两端分别与连接块612和第一固定块613连接。
31.卡位机构7包括有距离传感器71、第二支撑架72、第一电动推杆73和挡料块74,支
撑座1前部左侧设有距离传感器71,支撑座1后侧中部设有第二支撑架72,第二支撑架72中部安装有第一电动推杆73,第一电动推杆73伸缩杆83上连接有挡料块74。
32.推料机构8包括有滑槽81、第二滑块82、伸缩杆83、第二弹簧84、楔形块85、第三支撑架86、第三减速电机87、第三轴承座88、第二绕线轮89、第五转轴810、第二固定块811和第三弹簧812,支撑座1左右两侧均设有滑槽81,两个滑槽81之间滑动式连接有第二滑块82,第二滑块82左右两侧均设有伸缩杆83,两根伸缩杆83顶端均设有楔形块85,两根伸缩杆83上均绕有第二弹簧84,第二弹簧84两端分别与第二滑块82和伸缩杆83连接,支撑座1后部左侧设有第三支撑架86,第三支撑架86上部安装有第三减速电机87,支撑座1后侧中部设有第三轴承座88,第三轴承座88上部转动式设有第五转轴810,第五转轴810与第三减速电机87输出轴连接,第五转轴810上设有第二绕线轮89,第二绕线轮89与第二滑块82连接,支撑座1左右两侧均设有第二固定块811,第二固定块811与第二滑块82滑动式连接,两个第二固定块811上均绕有第三弹簧812,第三弹簧812两端分别与第二固定块811和第二滑块82连接。
33.还包括有清洁机构9,清洁机构9包括有第四支撑架91、水箱92、第五支撑架93、导流管94和电磁阀95,支撑座1左右两侧均设有两个第四支撑架91,四个第四支撑架91之间连接有水箱92,支撑座1左右两侧均设有两个第五支撑架93,同侧的两个第五支撑架93之间连接有导流管94,两根导流管94上部均设有电磁阀95。
34.还包括有擦料机构10,擦料机构10包括有水流量传感器101、第六支撑架102、第二电动推杆103、第三固定块104、滑杆105、第四弹簧106和擦料板107,左侧的导流管94上设有水流量传感器101,支撑座1后侧中部设有第六支撑架102,第六支撑架102中部安装有第二电动推杆103,支撑座1后部左右两侧均设有第三固定块104,两个第三固定块104上均滑动式设有滑杆105,两根滑杆105之间连接有擦料板107,两根滑杆105上均绕有第四弹簧106,第四弹簧106两端分别与第三固定块104和擦料板107连接。
35.还包括有控制箱2,支撑座1上侧中部安装有控制箱2,控制箱2内安装有开关电源、控制模块和电源模块,开关电源为建筑用模板水泥块清理装置供电,开关电源的输出端与电源模块通过电性连接,电源模块上通过线路连接有电源总开关,控制模块和电源模块通过电性连接;控制模块上连接有ds1302时钟电路和24c02电路;光敏传感器54、距离传感器71和水流量传感器101均与控制模块通过电性连接,第一减速电机53、第一电动推杆73、第二电动推杆103和电磁阀95均与控制模块通过继电器控制模块连接,第二减速电机68和第三减速电机87均与控制模块通过直流电机正反转模块连接。
36.本发明的工作原理是,当人们想要对水泥块进行清理时,可使用这种建筑用模板水泥块清理装置,首先,使用者按下电源总开关,将本装置上电,接着使用者将模板放在支撑座1上,并向后推动模板,模板向后运动到与卡位机构7接触后,使得卡位机构7对模板进行卡紧,模板遮住的光线达到刮出机构5的预设值时,使得控制模块控制刮出机构5运转,刮出机构5带动第一转轴4转动,第一转轴4带动刮刀3转动,与此同时,控制模块控制移动机构6运转十秒钟,移动机构6带动刮出机构5向前运动,刮出机构5带动刮刀3和第一转轴4向前运动,刮刀3在向前运动的过程中,刮刀3将模板上的水泥块进行刮落,水泥块刮落完成后,当刮出机构5向前运动的距离达到卡位机构7的预设值时,使得控制模块控制推料机构8运转,推料机构8对模板进行向后推送,与此同时,控制模块控制卡位机构7向下运动,卡位机构7向下运动脱离模板,使得模板向后运动脱离支撑座1,十秒钟后,控制模块控制移动机构
6反向运转,移动机构6带动刮出机构5向后运动到恢复原位,使用者再次按下电源总开关,将本装置断电。
37.使用者将模板放在支撑座1上后,模板遮挡的光线达到光敏传感器54的预设值时,使得控制模块控制第一减速电机53工作,第一减速电机53输出轴带动第一转轴4和刮刀3转动,接着使用者向前推动第一滑块52,第一滑块52带动第一减速电机53、第一转轴4和刮刀3向前运动,使得刮刀3对模块上的水泥块进行刮落,当第一滑块52向前运动的距离达到卡位机构7的预设值时,使得控制模块控制第一减速电机53静止,刮刀3随之停止转动,水泥块刮落完成后,使用者向后推动第一滑块52,第一滑块52带动第一减速电机53、第一转轴4和刮刀3向后运动到恢复原位。
38.使用者将模板放在支撑座1上后,模板遮挡的光线达到光敏传感器54的预设值时,使得控制模块控制第二减速电机68工作十秒,第二减速电机68输出轴带动第四转轴610转动,第四转轴610带动第一绕线轮69转动,第一绕线轮69拉动拉绳611,使得第一绕线轮69对拉绳611进行缠绕,拉绳611带动第二导向轮66转动,第二导向轮66带动第三转轴65转动,拉绳611带动第一导向轮63转动,第一导向轮63带动第二转轴62转动,拉绳611带动第一滑块52向前运动,第一滑块52带动刮刀3、第一转轴4和第一减速电机53向前运动,第一滑块52带动连接块612向前运动,第一弹簧614被压缩,使得刮刀3自动对模板上的水泥块进行刮落,当第一滑块52向前运动的距离达到卡位机构7的预设值时,使得控制模块控制第二减速电机68反向转动十秒钟,第二减速电机68输出轴带动第四转轴610和第一绕线轮69反向转动,第一绕线轮69松开拉绳611,第一弹簧614复位,从而带动连接块612向后运动,连接块612带动第一滑块52向后运动,第一滑块52带动第一减速电机53、第一转轴4和刮刀3向后运动,第一滑块52拉动拉绳611,拉绳611带动第二转轴62、第一导向轮63、第三转轴65和第二导向轮66反向转动,十秒钟后,控制模块控制第二减速电机68静止,以上动作随之停止。
39.使用者将模板放置在支撑座1上后,并向后推动模板,模板向后运动到与挡料块74接触后,使用者停止推动模板,当第一滑块52向前运动时,第一滑块52向前运动的距离达到距离传感器71的预设值时,使得控制模块控制第一电动推杆73伸缩杆向下缩短一秒钟,第一电动推杆73伸缩杆带动挡料块74向下运动,一秒钟后,控制模块控制第一电动推杆73伸缩杆静止四十秒钟,四十秒钟后,控制模块控制第一电动推杆73伸缩杆向上伸长一秒钟,第一电动推杆73伸缩杆带动挡料块74向上运动,一秒钟后,控制模块控制第一电动推杆73伸缩杆静止,使得挡料块74对模板进行卡位,防止模板发生位置偏移。
40.使用者将模板放置在支撑座1上后,并向后推动模板,模板向后运动到与楔形块85接触后,从而带动楔形块85向下运动,楔形块85带动伸缩杆83向下缩短,第二弹簧84被压缩,模板向后运动脱离楔形块85后,第二弹簧84复位,从而带动楔形块85向上运动,楔形块85带动伸缩杆83向上伸长,当第一滑块52向前运动时,第一滑块52向前运动的距离达到距离传感器71的预设值时,使得控制模块控制第三减速电机87工作十秒钟,第三减速电机87输出轴带动第五转轴810转动,第五转轴810带动第二绕线轮89转动,第二绕线轮89拉动第二滑块82,第三弹簧812被压缩,第二滑块82带动伸缩杆83、第二弹簧84和楔形块85向后运动,楔形块85向后运动到与模板接触后,楔形块85对模板进行向后推送,使得模板被推送出支撑座1,十秒钟后,控制模块控制第三减速电机87输出轴反向转动十秒钟,第三减速电机87输出轴带动第五转轴810和第二绕线轮89反向转动,第二绕线轮89松开第二滑块82,第三
弹簧812复位,从而带动第二滑块82、伸缩杆83、第二弹簧84和楔形块85向前运动到恢复原位,十秒钟后,控制模块控制第三减速电机87输出轴静止。
41.使用者将清水注入水箱92后,电磁阀95对阻挡清水流入导流管94中,当第一滑块52向前运动时,第一滑块52向前运动的距离达到距离传感器71的预设值时,使得控制模块控制电磁阀95通电十秒钟,使得电磁阀95打开导流管94通道,清水通过水箱92流入导流管94中,清水再通过导流管94喷洒在模板上,清水对刮落的水泥块进行清洗,十秒钟后,控制模块控制电磁阀95断电,使得电磁阀95关闭导流管94通道,清水无法通过导流管94通道流出。
42.清水流入导流管94中后,当清水的流速达到水流量传感器101的预设值时,使得控制模块控制第二电动推杆103伸缩杆向下伸长一秒钟,第二电动推杆103伸缩杆带动擦料板107向下运动,擦料板107带动滑杆105向下运动,第四弹簧106被拉伸,擦料板107向下运动到与模板接触后,擦料板107对模板上残留的清水进行擦拭,一秒钟后,控制模块控制第二电动推杆103伸缩杆静止,当清水的流速未达到水流量传感器101的预设值时,使得控制模块控制第二电动推杆103伸缩杆向上缩短一秒钟,第二电动推杆103伸缩杆带动擦料板107和滑杆105向上运动,第四弹簧106复位,一秒钟后,控制模块控制第二电动推杆103伸缩杆静止。
43.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。