1.本发明属于室内定位的技术领域,尤其涉及一种室内基于ibeacon设备的两点定位方法。
背景技术:
2.目前,针对一些大型地下停车场、大型商场等地方,由于室内环境的信好较差,无法精准定位的问题,基于ibeacon的定位方案是目前最常用的室内定位方法,其应用三角质心定位算法来实现定位,以三个ibeacon设备为信标节点,获取与设备相对应的所处平面模型上的坐标位置,最后得出所测未知节点的位置。在圆周定位模型中,理论上如果知道未知节点到三个信标节点的物理距离,那么以该三个信标节点为圆心,到未知节点的物理距离为半径建立三个圆周模型,则未知节点即处于三个圆周模型的交叉处。该三角质心定位算法中,需要通过3个ibeacon设备取其交点才能确定定位目标的位置,该3点取值计算较为复杂,且设备个数较多无疑增加了室内定位的成本。
技术实现要素:
3.本发明的目的在于提出一种室内基于ibeacon设备的两点定位方法,只需要两个ibeacon设备,借助方向定位,即可实现室内定位。
4.具体技术方案如下:
5.一种室内基于ibeacon设备的两点定位方法,包括步骤:
6.s1、在室内环境相隔一段距离,分别放置ibeacon设备a及ibeacon设备b;
7.s2、用户进入室内环境区域内,打开手机蓝牙,获取ibeacon设备a及ibeacon设备b分别到用户手机目标位置的距离l1、l2;
8.s3、分别以ibeacon设备a为圆心,距离l1为半径画圆,以ibeacon设备b为圆心距离l2为半径画圆,从而获得2个相交点m、n,其中一个相交点即为用户手机目标位置;
9.s4、用户手机目标位置移动一小段距离,获取ibeacon设备a及ibeacon设备b分别到用户手机目标位置的距离l3、l4;
10.s5、分别以ibeacon设备a为圆心,距离l3为半径画圆,以ibeacon设备b为圆心距离l4为半径画圆,从而获得2个相交点m1、n2,其中一个相交点即为用户手机目标位置;
11.s6、通过两次获得的相交点,将距离较近的两点合并组成mm1向量和nn1向量;
12.s7、通过将mm1向量、nn1向量与步骤s4用户手机目标位置移动一小段距离时手机自带传感器指向的方向进行方向对比,其相同方向的即为正确的用户手机目标位置移动向量,对应获取的相交点即为用户手机目标位置。
13.本发明利用了手机自带的方向传感器确定移动方向,结合2个ibeacon设备计算的定位位置,实现室内定位,相较于三角质心定位算法更方便,且减少使用1个ibeacon设备,也减少了定位成本,其定位方法极其方便,准确。
附图说明
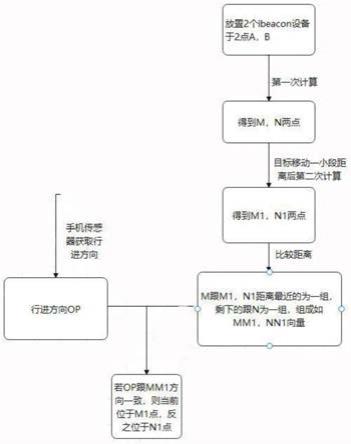
14.图1为本发明的流程示意图;
15.图2未本发明定位过程的计算示意图。
具体实施方式
16.下面结合附图和具体实施方式对本发明作进一步详细的说明。
17.如图1及2所示,一种室内基于ibeacon设备的两点定位方法,包括步骤:
18.s1、在室内环境相隔一段距离,分别放置ibeacon设备a及ibeacon设备b;为保证设备的高度跟目标手机高度基本处于水平面,保持a,b两点大概1.5m左右距离,不要设置金属类遮挡物;
19.s2、用户进入室内环境区域内,打开手机蓝牙,进行第一次定位计算,获取ibeacon设备a及ibeacon设备b分别到用户手机目标位置的距离l1、l2;
20.s3、分别以ibeacon设备a为圆心,距离l1为半径画圆,以ibeacon设备b为圆心距离l2为半径画圆,从而获得两个相交点m、n,其中一个相交点即为用户手机目标位置;此时m、n两个点中其中一点为目标真实位置,但目前未知是哪个点;
21.s4、用户手机目标位置移动一小段距离,进行第二次定位计算,获取ibeacon设备a及ibeacon设备b分别到用户手机目标位置的距离l3、l4;
22.s5、分别以ibeacon设备a为圆心,距离l3为半径画圆,以ibeacon设备b为圆心距离l4为半径画圆,从而获得两个相交点m1、n2,其中一个相交点即为用户手机目标位置;此时m1、n2两个点中其中一点为目标真实位置,但目前未知是哪个点;
23.s6、通过两次获得的相交点,将距离较近的两点合并组成mm1向量和nn1向量,意味着目标这段时间内是从m移动到m1,或者是从n移动到n1,但尚未可知;
24.s7、通过将mm1向量、nn1向量与步骤s4用户手机目标位置移动一小段距离时手机自带传感器指向的op行进方向进行方向对比,其相同方向的即为正确的用户手机目标位置移动向量,对应获取的相交点即为用户手机目标位置。
25.本发明利用了手机自带的方向传感器确定移动方向,结合两个ibeacon设备计算的定位位置,实现室内定位,相较于三角质心定位算法更方便,且减少使用一个ibeacon设备,也减少了定位成本。
26.本实施例中,步骤s4及s7中,用户手机目标位置移动一小段距离时,也可以通过指南针来确定行进方向,从而与mm1向量、nn1向量进行方向对比。
27.应当理解,以上所描述的具体实施例仅用于解释本发明,并不限定于本发明。由本发明的精神所引伸出的显而易见的变化或变动,仍处于本发明的保护范围之中。
技术特征:
1.一种室内基于ibeacon设备的两点定位方法,包括步骤:s1、在室内环境相隔一段距离,分别放置ibeacon设备a及ibeacon设备b;s2、用户进入室内环境区域内,打开手机蓝牙,获取ibeacon设备a及ibeacon设备b分别到用户手机目标位置的距离l1、l2;s3、分别以ibeacon设备a为圆心,距离l1为半径画圆,以ibeacon设备b为圆心距离l2为半径画圆,从而获得2个相交点m、n,其中一个相交点即为用户手机目标位置;s4、用户手机目标位置移动一小段距离,获取ibeacon设备a及ibeacon设备b分别到用户手机目标位置的距离l3、l4;s5、分别以ibeacon设备a为圆心,距离l3为半径画圆,以ibeacon设备b为圆心距离l4为半径画圆,从而获得2个相交点m1、n2,其中一个相交点即为用户手机目标位置;s6、通过两次获得的相交点,将距离较近的两点合并组成mm1向量和nn1向量;s7、通过将mm1向量、nn1向量与步骤s4用户手机目标位置移动一小段距离时手机自带传感器指向的方向进行方向对比,其相同方向的即为正确的用户手机目标位置移动向量,对应获取的相交点即为用户手机目标位置。2.根据权利要求1所述的一种室内基于ibeacon设备的两点定位方法,其特征在于,步骤s4及s7中,用户手机目标位置移动一小段距离时,也可以通过指南针来确定行进方向。
技术总结
本发明提供一种室内基于ibeacon设备的两点定位方法,在室内放置ibeacon设备A、B;目标进入后,获取ibeacon设备A、B分别到目标位置的距离L1、L2;分别以ibeacon设备A、B为圆心距离L1、L2为半径画圆,获得2个相交点M、N;目标位置移动一小段距离,获取ibeacon设备A、B分别到目标位置的距离L3、L4;分别以ibeacon设备A、B为圆心距离L3、L4为半径画圆,获得2个相交点M1、N2;通过两次获得的相交点,将距离较近的两点合并组成MM1向量和NN1向量;通过将MM1、NN1向量与手机自带传感器指向的方向进行方向对比,其相同方向的即为正确的目标位置移动向量,对应获取的相交点即为目标位置,其定位方法极其方便,准确。准确。准确。
技术研发人员:袁恩胜
受保护的技术使用者:贵州电子商务云运营有限责任公司
技术研发日:2021.11.18
技术公布日:2022/3/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
