技术特征:
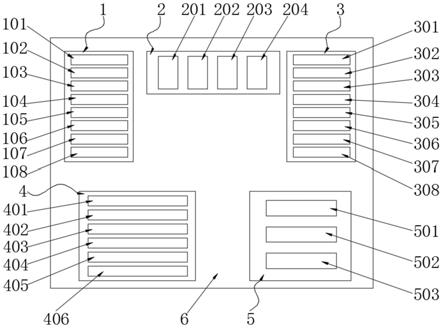
1.高分遥感三维可视化铁路选线辅助决策系统,包括显示屏(6),其特征在于:所述显示屏(6)上依次安装有项目管理模块(1)、高分影像提取模块(2)、平面设计模块(3)、横纵断面设计模块(4)和设计评价模块(5)。2.根据权利要求1所述的高分遥感三维可视化铁路选线辅助决策系统,其特征在于:所述项目管理模块(1)包括三维可视化模块(101)、三维漫游模块(102)、三维建模模块(103)、设计资料管理与输出模块(104)、新建项目模块(105)、打开项目模块(106)、保存项目模块(107)和加载项目模块(108),三维可视化模块(101)位于三维漫游模块(102)上方,且三维漫游模块(102)位于三维建模模块(103)上方,三维建模模块(103)位于设计资料管理与输出模块(104)上方,且设计资料管理与输出模块(104)位于新建项目模块(105)上方,新建项目模块(105)位于打开项目模块(106)上岗,且打开项目模块(106)位于保存项目模块(107)上方,保存项目模块(107)位于加载项目模块(108)上方。3.根据权利要求1所述的高分遥感三维可视化铁路选线辅助决策系统,其特征在于:所述高分影像提取模块(2)包括影像新建模块(201)、影像删除模块(202)、影像加载模块(203)和保存识别模块(204),影像新建模块(201)位于影像删除模块(202)的一侧,且影像删除模块(202)位于影像加载模块(203)的一侧,影像加载模块(203)位于保存识别模块(204)的一侧。4.根据权利要求1所述的高分遥感三维可视化铁路选线辅助决策系统,其特征在于:所述平面设计模块(3)包括手动选线模块(301)、自动选线模块(302)、节点编辑模块(303)、线路新建模块(304)、线路编辑模块(305)、线路删除模块(306)、线路保存模块(307)和智能优化模块(308),手动选线模块(301)位于自动选线模块(302)上方,且自动选线模块(302)位于节点编辑模块(303)的上方,节点编辑模块(303)位于线路新建模块(304)的上方,且线路新建模块(304)位于线路编辑模块(305)的上方,线路编辑模块(305)位于线路删除模块(306)的上方,且线路删除模块(306)位于线路保存模块(307)的上方,线路保存模块(307)位于智能优化模块(308)的上方。5.根据权利要求1所述的高分遥感三维可视化铁路选线辅助决策系统,其特征在于:所述横纵断面设计模块(4)包括断面新建模块(401)、断面编辑模块(402)、断面删除模块(403)、断面保存模块(404)、断面调设模块(405)和断面生成模块(406),断面新建模块(401)位于断面编辑模块(402)上方,且断面编辑模块(402)位于断面删除模块(403)上方,断面删除模块(403)位于断面保存模块(404)上方,且断面保存模块(404)位于断面调设模块(405)上方,断面调设模块(405)位于断面生成模块(406)上方。6.根据权利要求1所述的高分遥感三维可视化铁路选线辅助决策系统,其特征在于:所述设计评价模块(5)包括土石方量计算模块(501)、线路边坡点确定模块(502)和综合评价模块(503),土石方量计算模块(501)位于线路边坡点确定模块(502)上方,且线路边坡点确定模块(502)位于综合评价模块(503)上方。7.高分遥感三维可视化铁路选线辅助决策方法,包括步骤一,新建平面设计线;步骤二,生成初始导向线;步骤三,导向线智能优化;步骤四,节点详细编辑;步骤五,横纵端面设计;步骤六,设计方案评价;步骤七,费用综合评价;其特征在于:其中上述步骤一中,首先利用项目管理模块(1)中的新建项目模块(105)建一个新的项目,随后利用高分影像提取模块(2)得到选线位置的高分遥感三维图像,然后利用三维可视
化模块(101)调取需要选线的位置的遥感三维图像,继而利用平面设计模块(3)中的线路新建模块(304)来设置设计线名称、设计线编号、起点桩号、设计时速、线路宽度等相关参数;其中上述步骤二中,当步骤一中的线路参数设置完成后,利用手动选线模块(301)进行手动选线,利用鼠标点击功能按钮,在三维图像中拾取坐标,设置土石方、桥梁、隧道的单价,然后设置粒子数,总循环数,随即点击确定按钮,随即线路编辑模块(305)根据线路生成方法自动生成一条初始导向线;其中上述步骤三中,当步骤二中的初始导向线生成后,利用智能优化模块(308)采用粒子群算法线路进行优化,即将三维线性优化问题可以归结为研究区域内找寻最佳的线路平面和纵断面参数集的过程,其数学模型描述为:min f(x,y,r,l0,l
c
,h,r),首先通过参数改进:惯性权重,收缩隐私,追踪动态系统:其次混合算法:改进粒子与粒子间的搜寻行为模式:最后以网络拓扑概念引进搜寻时个体当前最优点的方式对粒子群算法进行改进,得到粒子群优化算法,继而利用粒子群优化算法来对线路进行优化计算,包括粒子的基本搜索、静态搜索和轴搜索等步骤进行,实现过程如下:1)初始化粒子维数、粒子规模、搜索范围、速度、最大迭代次数等参数;2)计算每个粒子的适应度;3)将每个粒子的适应值与自身所经历过的最好位置pbest的适应值相比较,如果较好,则将其作为最好的位置,并更新pbest;4)将每个粒子的适应值与全局所经历过的最好位置gbest的适应值相比较,如果较好,则将其作为当前的全局最好位置,并更新gbest;5)更新各个粒子的速度与位置;6)如果满足结束条件,输出gbest,否则返回2);在线路地物的自动规避方面,采用线性相交判别方法实现,基本思路如下:已知(x1,y1),(x2,y2),可确定直线ax by c=0,其中通过对a、b、c三个系数的计算可以得到直线的交点坐标(x,y),检测交点是否在线段上只需要判断(y-y1)/(y-y2)符号即可,若其值为负说明该点在线段上,在线段上则需要对进行规避,具体实现方法如下:如果判断了第i条切垂线上的节点与第i-1条切垂线已寻找到的点的线段与地物矢量多边形的任意一条边相交,则在第i条切垂线上继续寻找满足坡度要求且规避地物的线路节点p
i
,自动规避障碍物之后形成优化后的线路;其中上述步骤四中,当步骤三中的线路优化之后,通过skyline独特的三维漫游模块(102)中的三维漫游功能,查看生成线路的每个节点详细信息,并利用节点编辑模块(303)对坐标、参数、转角等信息查看以及节点处连接线类型的修改;其中上述步骤五中,当步骤四中的详细节点修改完成后,横纵断面设计模块(4)生成该条线路的横纵断面信息,并且预制铁路道路、桥梁、隧道等标准横断面,自动完成横纵断面地面线的提取和计算;其中上述步骤六中,当步骤五中的横纵端面设置完成后,设计评价模块(5)中的土石方量计算模块(501)计算显示并输出已选线路方案土石方量,根据费用模型,综合考虑经济、环境多目标对路线方案进行设计评价,计算模型为:
其中,k
j
为第j类地块的建设单价,(j=1,2,3,...,m),a
j
为道路覆盖的第j类地块的面积,与位置相关的费用c
n
,与长度相关的费用计算思路为:选线阶段假设线路仅由直线单元和圆曲线单元构成,设r
i
为第i个交点圆曲线半径,c
i
(xc
i
,yc
i
)和t
i
(xt
i
,yt
i
)分别为第i个交点处的zy点和yz点,δ
i
为第i个交点处的曲线转角,则线路总长度l
n
为:式中:n为圆曲线总数。与道路相关的费用还包括一些工程费用以及环境相关费用,其中路基土石方费用最为重要,相应路基土石方费用采用下面公式计算:其中,路基横断面面积算法公式如下:a=b
·
δh m
·
δh2式中:b——路基面宽度;δh——路基的填挖方高度,其值为该点的地面高程与格点高程差的绝对值;1:m——边坡的比率;n——路基土石方的计算段数;d
i
——第i段的路基计算长度;c
i
——第i段的路基填挖方费用;a
il
——第i段的路基左侧路基横断面面积;a
ir
——第i段的路基右侧路基横断面面积;综上,综合费用计算就是将线路优化过程中的多因素问题进行统一,转化为线路总费用,则费用模型表示为:c=c
n
c
q
c
l
c
qs
从而得出线路施工所需要的的费用;其中上述步骤七中,当根据步骤六中的费用模型计算处费用后,综合评价模块(503)对总费用、构造物费用、工程费用、占地费用等几个方面来进行费用评价,在选择了输出位置后,输出评价结果。8.根据权利要求7所述的高分遥感三维可视化铁路选线辅助决策方法,其特征在于:所述步骤二中,线路生成方法为:参考hao模型生成初始导向线,通过输入线路起终点坐标s(x
s
,y
s
)、e(x
e
,y
e
),并在设计过程中考虑相关约束,坡度约束、限制连续转弯、控制点高程约束等,假设起点终点分别为s、e,连接起终点se,用m条切垂线等分se,切垂线与线路交于m个不同的点p
i
,这m个点即为线路交点,在m条切垂线上进行线路节点寻优,该方法并定义了两套坐标系统:一是全局坐标系,以正北为x轴,正东为y轴;二是影像局部坐标系,以影像左上角为坐标原点,影像边界分别为x、y轴,具体实现步骤如下:每条切垂线上,记o
i
为第i条切垂线的坐标原点,其坐标为(x
oi
,y
oi
)为:各交点p
i
处处的d
i
存在于不同的一维局部坐标系,为获得线路模型的交点序列,转换到全局坐标系下,加黑色切垂线与x轴的夹角为θ,则p
i
的全局坐标为:
最终通过连接各个交点,形成一条链式折线,得到选线设计的初始导向线。9.根据权利要求7所述的高分遥感三维可视化铁路选线辅助决策方法,其特征在于:所述步骤三中,粒子群算法pso基本原理如下:v
id
=ωv
id
c1random(0,1)(p
id-x
id
) c2random(0,1)(p
gd-x
id
)x
id
=x
id
v
id
其中,ω为惯性因子其值非负,通过调整其值,可以对全局寻优性能和局部寻优性能进行调整,c1和c2为加速常数,前者为每个粒子的个体学习因子,后者为每个粒子的社会学习因子,通常设置c1=c2=2,random(0,1)表示区间[0,1]的随机数,p
id
表示第i个变量的个体极值的第d维,p
gd
表示全局最优解的第d维。
技术总结
本发明公开了高分遥感三维可视化铁路选线辅助决策系统及方法,包括步骤一,新建平面设计线;步骤二,生成初始导向线;步骤三,导向线智能优化;步骤四,节点详细编辑;步骤五,横纵端面设计;步骤六,设计方案评价;步骤七,费用综合评价;本发明利用高分影像提取模块提取线路规划地的高分遥感三维数据源,随后通过三维建模模块构建了基于高分遥感影像的沉浸式三维场景,并且通过三维可视化模块进行显现,增加了线路的直观性,提升了显示效果,并且采用基础HAO模型建立线路初始导向线,并利用RPSO粒子群优化算法对线路平纵面进行了优化,方法简单直接,大大提高了计算的效率,并且降低了误差,提升了计算结果的可靠性。提升了计算结果的可靠性。提升了计算结果的可靠性。
技术研发人员:张蕴灵 龚婷婷 侯芸 宋张亮 孙雨 胡林 杨璇 李旺 赵政帆 董庆豪
受保护的技术使用者:中咨数据有限公司
技术研发日:2021.11.18
技术公布日:2022/3/7
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。