1.本实用新型涉及基于步进电机驱动的静音模块化智能机械仿生眼睛领域,尤其涉及基于步进电机驱动的静音模块化智能机械仿生眼睛。
背景技术:
2.眼睛作为仿生机器人、展示类模特以及人型玩具等产品所必须的结构,其使用寿命、运行噪音、灵活度和逼真度可以直接决定产品的档次。
3.目前,市面上应用最多、技术最成熟的仿生眼睛结构驱动方式为有源式舵机,此类产品通过舵机驱动各活动部件,模仿眼睛动作。
4.现有的仿生眼睛中,所使用的有源舵机寿命极为有限,以舵机作为驱动器,眼睛结构无法长期稳定工作,舵机在运行过程中噪音较大,眼睛结构在安静环境下的使用体验不佳。
5.因此,有必要提供基于步进电机驱动的静音模块化智能机械仿生眼睛解决上述技术问题。
技术实现要素:
6.本实用新型提供基于步进电机驱动的静音模块化智能机械仿生眼睛,解决了现有的仿生眼睛使用有源舵机使用寿命有限,噪音大,工作不稳定的问题。
7.为解决上述技术问题,本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛,包括:安装架;
8.眼球组件,所述眼球组件设置于所述安装架的一侧,所述眼球组件包括眼球,所述眼球一侧顶部分别固定连接有第一球头螺丝和第二球头螺丝,所述眼球一侧的底部且位于所述第一球头螺丝的下方设置有第三球头螺丝,所述第三球头螺丝的表面设置有连接杆,所述连接杆的一端与所述安装架的一侧连接;
9.眼睑组件,所述眼睑组件设置于所述眼球的表面且位于所述安装架相对的一侧;
10.第一驱动装置,所述第一驱动装置设置于所述安装架的一侧,所述安装架的表面且位于所述第一驱动装置相对的一侧设置有第二驱动装置,所述安装架的底部设置有第三驱动装置,所述安装架的表面且位于所述第三驱动装置的上方设置有第四驱动装置。
11.优选的,所述眼睑组件包括两个连接件,两个所述连接件之间分别设置有上眼睑和下眼睑。
12.优选的,所述第一驱动装置包括第一电机,所述第一电机输出轴的一端通过联轴器固定连接有第一转动块,所述第一转动块的一侧连接有第一拉杆,所述第一拉杆的一端与第三球头螺丝连接。
13.优选的,所述第二驱动装置包括第二电机,所述第二电机输出轴的一端通过联轴器固定连接有第二转动块,所述第二转动块的一侧连接有第二拉杆,所述第二拉杆的一端与所述第二球头螺丝连接。
14.优选的,所述第三驱动装置包括第三电机,所述第三电机输出轴的一端通过联轴器固定连接有第三转动块,所述第三转动块的一端连接有第三拉杆,所述第三拉杆的一端与所述下眼睑的一侧连接。
15.优选的,所述第四驱动装置包括第四电机,所述第四电机输出轴的一端通过联轴器固定连接有第四转动块,所述第四转动块的一侧连接有第四拉杆,所述第四拉杆的一端与所述上眼睑的一侧连接。
16.优选的,所述安装架表面的一侧设置有传感器。
17.优选的,所述眼球的表面设置有更换组件,所述更换组件包括更换件,所述更换件的一侧固定连接有卡块,所述眼球的表面开设有与所述卡块相适配的卡槽。
18.优选的,所述更换件的一侧设置有固定组件,所述固定组件包括固定件,所述眼球的内部开设有与所述固定件相适配的固定槽。
19.与相关技术相比较,本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛具有如下有益效果:
20.本实用新型提供基于步进电机驱动的静音模块化智能机械仿生眼睛,使用第一驱动装置、第二驱动装置、第三驱动装置和第四驱动装置使得产品使用寿命得到极大提升,运用在仿生机器人、展示类模特以及人型玩具中可以长时间不间断展示运行,并且实现无噪音运行,可以在特殊环境使用,应用范围更广泛,步进电机驱动下,动作更为流畅,具有更好的展现效果,采用模块化设计思想,眼睑和眼球等运动方式可以随意组合,设计灵活性更强。
附图说明
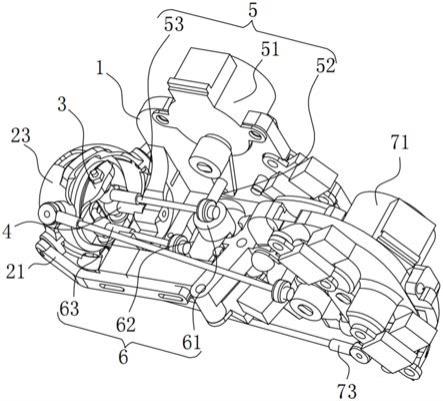
21.图1为本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛的第一实施例的结构示意图;
22.图2为图1所示的装置整体的正视图;
23.图3为图1所示的装置整体的俯视图;
24.图4为图1所示的眼睑组件的结构示意图;
25.图5为图1所示的眼球组件的结构示意图;
26.图6为本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛的第二实施例的结构示意图;
27.图7为图6所示的卡槽的结构示意图;
28.图8为图6所示的更换组件的结构示意图;
29.图9为图8所示的a部放大示意图。
30.图中标号:1、安装架,2、眼睑组件,21、连接件,22、下眼睑,23、上眼睑,3、眼球组件,31、眼球,32、第一球头螺丝,33、第二球头螺丝,34、第三球头螺丝,4、连接杆,5、第一驱动装置,51、第一电机,52、第一转动块,53、第一拉杆,6、第二驱动装置,61、第二电机,62、第二转动块,63、第二拉杆,7、第三驱动装置,71、第三电机,72、第三转动块,73、第三拉杆,8、第四驱动装置,81、第四电机,82、第四转动块,83、第四拉杆,9、传感器,10、更换组件,101、更换件,102、卡块,103、卡槽,11、固定组件,111、固定件,112、固定槽。
具体实施方式
31.下面结合附图和实施方式对本实用新型作进一步说明。
32.第一实施例
33.请结合参阅图1、图2、图3、图4和图5,其中,图1为本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛的第一实施例的结构示意图;图2为图1所示的装置整体的正视图;图3为图1所示的装置整体的俯视图;图4为图1所示的眼睑组件的结构示意图;图5为图1所示的眼球组件的结构示意图。基于步进电机驱动的静音模块化智能机械仿生眼睛,包括:安装架1;
34.眼球组件3,所述眼球组件3设置于所述安装架1的一侧,所述眼球组件3包括眼球31,所述眼球31一侧顶部分别固定连接有第一球头螺丝32和第二球头螺丝33,所述眼球31一侧的底部且位于所述第一球头螺丝32的下方设置有第三球头螺丝34,所述第三球头螺丝34的表面设置有连接杆4,所述连接杆4的一端与所述安装架1的一侧连接;
35.请结合图5可以得知眼球组件3左和上球头螺丝负责与电机连杆相接,中间球头螺丝处于眼球球心,与固定杆相接,整个眼球结构围绕中间球头螺丝转动,眼球后片负责固定眼球和球头螺丝。
36.眼睑组件2,所述眼睑组件2设置于所述眼球31的表面且位于所述安装架1相对的一侧;
37.第一驱动装置5,所述第一驱动装置5设置于所述安装架1的一侧,所述安装架1的表面且位于所述第一驱动装置5相对的一侧设置有第二驱动装置6,所述安装架1的底部设置有第三驱动装置7,所述安装架1的表面且位于所述第三驱动装置7的上方设置有第四驱动装置8。
38.所述眼睑组件2包括两个连接件21,两个所述连接件21之间分别设置有上眼睑23和下眼睑22。
39.在两个连接件21表面的一侧均对称开设有两个滑动槽,在安装架1外表面的两侧对称固定连接有两个与滑动槽相适配的定位块,上眼睑23和下眼睑22与两个连接件21之间为转动连接。
40.所述第一驱动装置5包括第一电机51,所述第一电机51输出轴的一端通过联轴器固定连接有第一转动块52,所述第一转动块52的一侧连接有第一拉杆53,所述第一拉杆53的一端与第三球头螺丝34连接。
41.第一电机51通过螺纹栓与安装架1表面的左上角位置螺纹连接,第一电机51步进电机,第一转动块52与第一拉杆53之间通过转动件转动连接,第一拉杆53与第三球头螺丝34之间为螺纹连接。
42.所述第二驱动装置6包括第二电机61,所述第二电机61输出轴的一端通过联轴器固定连接有第二转动块62,所述第二转动块62的一侧连接有第二拉杆63,所述第二拉杆63的一端与所述第二球头螺丝33连接。
43.第二电机61通过螺纹栓与安装架1的底部螺纹连接,第二转动块62与第二拉杆63之间也通过转动件转动连接,第二电机61也为步进电机,第二拉杆63的一端与第二球头螺丝33之间也为螺纹连接。
44.所述第三驱动装置7包括第三电机71,所述第三电机71输出轴的一端通过联轴器
固定连接有第三转动块72,所述第三转动块72的一端连接有第三拉杆73,所述第三拉杆73的一端与所述下眼睑22的一侧连接。
45.第三电机71通过螺纹栓与安装架1的右侧螺纹连接,第三转动块72与第三拉杆73的一端通过转动件转动连接,第三拉杆73的一端通过转动轴与下眼睑22表面的一侧转动连接,第三电机71也为步进电机。
46.所述第四驱动装置8包括第四电机81,所述第四电机81输出轴的一端通过联轴器固定连接有第四转动块82,所述第四转动块82的一侧连接有第四拉杆83,所述第四拉杆83的一端与所述上眼睑23的一侧连接。
47.第四电机81通过螺纹栓与安装架1的右下方螺纹连接,第四转动块82与第四拉杆83的一端通过转动件转动连接,第四拉杆83的一端通过转动轴与上眼睑23的一侧通过转动轴转动连接,第四电机81也为步进电机。
48.所述安装架1表面的一侧设置有传感器9。
49.在安装架1的表面且位于第一电机51、第二电机61、第三电机71和第四电机81相对的一侧均固定安装有传感器9,四个传感器9可以单独控制第一电机51、第二电机61、第三电机71和第四电机81进行工作。
50.传感器9可以控制驱动装置的活动范围。
51.驱动装置每只眼睛部署四套步进电机组件,分别控制眼球左右转动、眼球上下转动、上眼睑闭合以及下眼睑闭合,电机传感器用于电机运行位置的校准,摇臂连接件与电机摇臂固定后,不可活动;摇臂连接件与电机连杆可在一定范围进行相对万象转动。
52.本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛,其工作原理如下:
53.工作时,当眼球31进行左右移动时分别启动第一电机51和第二电机61带动第一转动块52和第二转动块62进行转动,当第一转动块52和第二转动块62转动时带动第一拉杆53和第二拉杆63进行前后移动,当第一拉杆53和第二拉杆63前后移动时通过传感器9的信息控制第一拉杆53和第二拉杆63拉动距离,从而通过第三球头螺丝34和第二球头螺丝33拉动眼球31在上眼睑23和下眼睑22的内部进行移动。
54.当需要对上眼睑23和下眼睑22进行上下移动完成眨眼操作者时,启动第三电机71和第四电机81带动第三转动块72和第四转动块82进行转动,当第三转动块72和第四转动块82转动时拉动第三拉杆73和第四拉杆83进行前后移动,当第三拉杆73和第四拉杆83前后移动时通过安装架1一侧的传感器9控制第三拉杆73和第四拉杆83前后移动的范围,当第三拉杆73和第四拉杆83在传感器9控制的范围内往复移动时即可带动上眼睑23和下眼睑22上下移动完成眨眼操作。
55.与相关技术相比较,本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛具有如下有益效果:
56.本实用新型提供基于步进电机驱动的静音模块化智能机械仿生眼睛,使用第一驱动装置5、第二驱动装置6、第三驱动装置7和第四驱动装置8使用的寿命得到极大提升,运用在仿生机器人、展示类模特以及人型玩具中可以长时间不间断展示运行,并且实现无噪音运行,可以在特殊环境使用,应用范围更广泛,步进电机驱动下,动作更为流畅,具有更好的展现效果,采用模块化设计思想,使得眼睑和眼球等运动方式可以随意组合,设计灵活性更
强。
57.第二实施例
58.请结合参阅图6、图7、图8和图9,基于本技术的第一实施例提供的基于步进电机驱动的静音模块化智能机械仿生眼睛,本技术的第二实施例提出另基于步进电机驱动的静音模块化智能机械仿生眼睛。第二实施例仅仅是第一实施例优选的方式,第二实施例的实施对第一实施例的单独实施不会造成影响。
59.具体的,本技术的第二实施例提供的基于步进电机驱动的静音模块化智能机械仿生眼睛的不同之处在于,基于步进电机驱动的静音模块化智能机械仿生眼睛,所述眼球31的表面设置有更换组件10,所述更换组件10包括更换件101,所述更换件101的一侧固定连接有卡块102,所述眼球31的表面开设有与所述卡块102相适配的卡槽103。
60.在眼球31的内部且位于卡槽103相对的一侧开设有暗槽,卡块102的形状为字母t,在眼球31的表面且位于暗槽相对的一侧开设有环形槽,方便卡块102的移动。
61.所述更换件101的一侧设置有固定组件11,所述固定组件11包括固定件111,所述眼球31的内部开设有与所述固定件111相适配的固定槽112。
62.固定件111包括安装腔,在安装腔的内部设置有固定块,在固定块的一侧固定连接有拉动杆,在拉动杆的表面且位于安装腔的表面套设有弹簧,在更换件101的表面开设有与拉动杆相适配的凹槽,方便拉动杆的放置。
63.本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛,其工作原理如下:
64.使用时,当需要对眼球31的表面安装更换件101时,操作者首先拉动更换件101内部的固定件111移动至更换件101的内部,当固定件111移动至更换件101的内部后再将更换件101一侧的卡块102与眼球31表面的卡槽103相接处重合,当卡块102与卡槽103相接处重合后操作者在通过转动更换件101与眼球31内部的暗槽重合固定,当卡块102移动至暗槽的内部后操作者再松掉固定件111,使固定件111与眼球31表面的固定槽112重合固定即可。
65.与相关技术相比较,本实用新型提供的基于步进电机驱动的静音模块化智能机械仿生眼睛具有如下有益效果:
66.本实用新型提供基于步进电机驱动的静音模块化智能机械仿生眼睛,在眼球31的表面设置更换组件10能够在眼球31的表情进行更换,也对眼球31起到保护的作用,在更换件101的一侧设置卡块102配合眼球31内部的卡槽103能方便对更换件101进行安装和拆卸,在更换件101的一侧设置固定组件11能提高更换件101的稳定性。
67.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。