用于载具的灵活电池系统
背景技术:
1.新型电池供电的载具正在以新的设计和/或配置进行开发。例如,kitty hawk公司已经开发了电池供电的多旋翼机,如果需要,其能够从水上起飞和/或在水上降落。将合期望的是新型的电池系统和/或架构,其可以在这种新的载具设计和/或配置的框架或约束中工作,并且还改进了载具的使用和/或管理的一些方面。
附图说明
2.在以下详细描述和附图中公开了本发明的各种实施例。
3.图1a是电池供电载具的一个实施例的透视图;图1b是电池供电载具的一个实施例的侧视图;图2是示出配置多个电池的过程的一个实施例的流程图,所述电池向载具中的多个电动机供电;图3是示出灵活电池系统的一个实施例的示意图;图4是示出灵活电池系统的一个实施例的示意图,其中,电池和电动机处于并联配置中;图5是示出配置多个电池的过程的一个实施例的流程图,包括有响应于在预期载具起步时生成的配置指令而将至少一些电池并联连接在一起;图6是示出电池串联的灵活电池系统的一个实施例的示意图;图7是示出配置多个电池的过程的一个实施例的流程图,包括有响应于预期对多个电池充电时生成的配置指令而将至少一些电池串联连接在一起;图8是示出灵活电池系统的一个实施例的示意图,其中,坏的电池被隔离;图9是示出配置多个电池的过程的一个实施例的流程图,包括有隔离故障电池;图10a是示出灵活电池系统的一个实施例的示意图,其中,一组电池串联连接在一起,而另一组电池并联连接在一起;图10b是示出由第一组电池供电的第一组一个或多个电动机和由第二组一个或多个电池供电的第二组一个或多个电动机的一个实施例的示意图;图11是示出配置由第一组电池供电的第一组一个或多个电动机和由第二组一个或多个电池供电的第二组一个或多个电动机的过程的一个实施例的流程图。
具体实施方式
4.本发明可以以多种方式来实施,包括作为过程;装置;系统;物质组合物;在计算机可读存储介质上实现的计算机程序产品;和/或处理器,诸如被配置成执行指令的处理器,所述指令存储在耦合到处理器的存储器上和/或由耦合到处理器的存储器提供。在本说明书中,这些实现方式或者本发明可以采取的任何其他形式都可以被称为技术。通常,在本发明的范围内,可以改变所公开的过程的步骤顺序。除非另外说明,否则被描述为被配置成执行任务的诸如处理器或存储器的组件可以被实现为临时被配置成在给定时间执行该任务
的通用组件或被制造为执行该任务的特定组件。如本文所使用的,术语“处理器”是指被配置成处理诸如计算机程序指令之类的数据的一个或多个设备、电路和/或处理核。
5.下面提供本发明的一个或多个实施例的详细描述以及示出本发明原理的附图。结合这些实施例描述本发明,但本发明不局限于任何实施例。本发明的范围仅由权利要求来限定,并且本发明包含许多替代、修改和等效物。在以下描述中阐述了许多具体细节,以便提供对本发明的透彻理解。这些细节是出于示例的目的而提供的,并且本发明可以根据权利要求来实施,而不需要这些具体细节中的一些或全部。为了清楚起见,没有详细描述与本发明相关的技术领域中已知的技术材料,使得不会不必要地模糊本发明。
6.本文描述了用于载具中或由载具使用的灵活电池系统的各种实施例。在一些实施例中,接收(例如,通过电池配置控制器)与配置多个电池相关联的配置指令,所述多个电池向载具中的多个电动机供电。多个电池如配置指令所指定的那样进行配置,其中,多个电池能够以多种配置进行配置,包括:(1)第一配置,其中,多个电池中的至少一些并联地电连接在一起,以及(2)第二配置,其中,多个电池中的至少一些串联地电连接在一起。在一些情况下,载具中的所有电动机都由整组电池来供电。或者,一组电动机可由一组电池来供电,而另一组电动机可由另一组电池来供电。如下面将更详细描述的,各种配置在各种情况下可能是有用的和/或有益的。
7.图1a是电池供电载具的一个实施例的透视图。在所示的示例中,多旋翼机(100a)是电池供电的载具,如果需要,其能够在水上执行起飞和降落。多旋翼机具有两个中空的浮体或浮筒(102a),其为多旋翼机提供足够的排水量以使其具有正浮力并浮在水上。或者,如果需要,多旋翼机也可以从固体地面起飞或降落在固体地面上。
8.图1b是电池供电载具的一个实施例的侧视图。图1b继续了图1a的示例。在该示例中,载具(100b)中的每个浮体(102b)用于保持五个电池104。进行了(将电池储存在浮体(102b)中而不是机身(106)中的)这种设计选择,部分是因为它可以实现与电动机(108)较短的电连接,所述电动机(108)分散在浮体(102b)顶部和悬臂(110)远端。这也可以使回收系统(例如,一个或多个降落伞)可以存储在驾驶舱后的机身(106)中。
9.与使用单个较大的电池相比,使用多个较小的电池的设计选择也在载具对浮体内部的受限访问的情况下起作用。为了防止水侵入浮体(其还包含其他水敏感电组件,例如控制电动机的印刷电路板),对浮体内部的访问被限制到浮体顶部上的三个访问端口(112)。利用这些相对较小的访问端口,与插入单个较大的电池相比,插入多个较小的电池会更加容易。
10.在该载具的较早版本中,每个电池(104)都与对应的电动机(108)配对,使得每个电池仅向一个电动机供电,并且每个电动机仅由一个电池来供电。然而,如将在下面更详细地描述的,出于充电目的、安全性、更好的飞行性能等,可能期望一种灵活的或可配置的电池系统(例如,其中,电池和/或电动机能够以各种方式电连接在一起)。以下附图描述了这种灵活电池系统的各种示例。
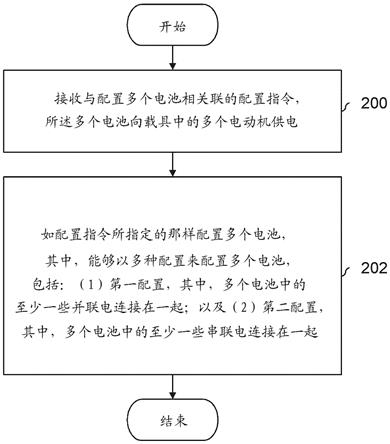
11.图2是示出了配置多个电池的过程的一个实施例的流程图,所述电池向载具中的多个电动机供电。例如,图1a和1b中的多旋翼机100a和100b中的10个电池可以以各种方式配置以向10个电动机(例如,图1b中的108)供电。
12.在200,接收与配置多个电池相关联的配置指令,所述多个电池向载具中的多个电
动机供电。在一些实施例中,基于载具的状态,生成配置指令。例如,如果载具正在充电,则对应的配置指令(例如,使得电池以充电所期望的方式被配置)被发送到控制可配置电连接器的控制器。或者,如果载具正在起动(例如,预计起飞),则对应于飞行和/或有助于飞行性能的配置指令可以被发送到控制可配置电连接器的控制器。
13.在202,如配置指令所指定的那样配置多个电池,其中,能够以多种配置来配置多个电池,包括:(1)第一配置,其中,多个电池中的至少一些并联(例如,电)连接在一起,以及(2)第二配置,其中,多个电池中的至少一些串联(例如,电)连接在一起。例如,如果至少一些电池并联连接在一起,则当一个电动机比其他电动机汲取明显更多的功率时,该(第一)配置可以改善飞行性能。下面更详细地描述这种情况的一个示例。
14.图3是示出了灵活电池系统的一个实施例的示意图。为了简化和便于解释,此示例和本文描述的一些其他示例仅包括了两个电池和两个电动机。当然,其他实施例可以包括不同数量的电池和/或电动机。
15.电池配置控制器(300)例如从诸如飞行控制器或中央控制器之类的某个其他控制器(例如,其知道载具是否在地面上并且将要充电、将很快起飞等)接收配置指令,并且相应地配置电连接器(302)。
16.电池(304a和304b)的正和负连接器(例如,b1 、b1-、b2 和b2-)连接到可配置电连接器(302)。例如,可配置电连接器可包括一个或多个开关,其允许电池连接(例如,b1 、b1-、b2 和b2-)以各种方式(例如,并联或串联)连接在一起。可配置电连接器(302)中的开关是由电池配置控制器(300)控制的。
17.类似地,到电动机(306a和306b)的正和负电源(例如,m1ps 、m1ps-、m2ps 和m2ps-)连接到可配置电连接器(302)并且可以使用可配置电连接器(302)以各种方式来配置。例如,到第一和第二电动机(306a和306b)的电源可以是共享电源(例如,b1 和b2 电连接,并且b1-和b2-电连接),或者到两个电动机的电源可以是电隔离的(例如,b1 和b2 电隔离,并且b1-和b2-电隔离)。
18.暂时回到图2中的步骤202,在飞行期间当一个电动机比另一个电动机消耗明显更多的功率时,第一配置(其中至少一些电池并联连接在一起)可能是合期望的。下面的附图示出了这种配置的一个示例,并且其在飞行期间可能是合期望的以改善飞行性能。
19.图4是示出了灵活电池系统的一个实施例的示意图,其中,电池和电动机处于并联配置。为了可读性,图3中所示的电池配置控制器(300)和可配置电连接器(302)未在该图中示出。然而,应当理解,控制器(例如,图3中的300)配置一个或多个可配置电连接器(例如,图3中的302),诸如开关,以便产生这里所示的配置。图4示出了(第一)配置的一个示例,其中,多个电池中的至少一些并联地电连接在一起(参见图2中的步骤202)。
20.当载具飞行并且电动机之一(在该示例中为第二电动机(406))比另一个电动机(在该示例中为第一电动机(404))消耗更多的功率时,这里所示的配置可能是合期望的。例如,附接到第二电动机(406)的螺旋桨可产生比附接到第一电动机(404)的螺旋桨更大的推力和/或更快地转动。
21.在较旧版本的载具(未示出)中,第一电池(400)将仅向第一电动机(404)供电,并且第二电池(402)将仅向第二电动机(406)供电。然而,如果电动机之一大大地汲取其电池,那么,即使系统中的其他电池没有被完全利用,它也将被该(单个)电池的电流限制或其他
容量或性能限制所限制或以其他方式封顶。例如,如果载具正在转弯或侧倾,则一些电动机将比载具中的其他电动机工作负荷更大,因此一些电池将比其他电池被更充分地利用。通过如这里所示将电池和电动机并联连接在一起,可以在超过单个电池的程度或限度上容纳更耗电的电动机(例如406)。例如,如果每个电池仅连接到一个电动机,则驱动负荷更大的电动机(406)将限于1
×
单个电池的功率上限或限制。利用这里所示的并联布置,功率上限可以增加到严格大于1
×
单个电池(例如,1.1
×
、1.2
×
等)的某值。换句话说,通过改变电池的布置,在给定各个电池的相同电池容量的情况下,一些电动机可以被供应更多的电力。这是合期望的,因为它改善了飞行性能(例如,更好的侧倾或转向),而不会明显增加重量和/或需要更昂贵的电池。
22.在一些实施例中,在起飞之前,将灵活电池系统置于这里所示的配置(或一些其他类似配置)中。以下附图以流程图更一般地和/或形式地描述了这一点。
23.图5是示出配置多个电池的过程的一个实施例的流程图,包括有响应于在预期载具起步时生成的配置指令而将至少一些电池并联连接在一起。与图2的示例一样,在一些实施例中,该过程由一些电池配置控制器(例如,图3中的300)来执行。
24.在500,接收与配置多个电池相关联的配置指令,所述多个电池向载具中的多个电动机供电,其中,配置指令是在预期载具起步时生成的。
25.例如,可以存在一些中央控制器或飞行控制器,当载具处于某个飞行前状态(例如,在地面上、准备好起飞)时,其生成配置指令(例如,载具即将起飞的指令、至少一些电池应当被置于并联配置的指令等),并且将其发送到电池配置控制器。
26.在502,如配置指令所指定的那样配置多个电池,其中,能够以多种配置来配置多个电池,包括:(1)第一配置,其中,多个电池中的至少一些并联连接在一起,以及(2)第二配置,其中,多个电池中的至少一些串联连接在一起,并且响应于接收到预期载具起步而生成的配置指令,多个电池被配置在所述第一配置中,其中,多个电池中的至少一些并联连接在一起。
27.例如,如上在图4中所述,以这种方式配置电池可以通过使一些耗电电动机(例如,图4中的406)在一些情况下(例如,当(一个或多个)其他电动机(例如,图4中的404)消耗较少量的功率并且电池具有可用的容量或资源时)能访问超过单个电池的功率来改善飞行性能。
28.暂时回到图2中的步骤202,当电池被充电时,第二配置(其中至少一些电池串联连接在一起)可能是合期望的。下面的附图示出了这种配置的一个示例,并且其在充电期间可能是合期望的。
29.图6是示出了电池串联的灵活电池系统的一个实施例的示意图。例如,图3中的电池配置控制器300可以设置可配置电连接器(302),其可以包括一个或多个开关,以创建这里所示的电配置。如前所述,为了可读性,未示出电池配置控制器(例如,图3中的300)和至少一些可配置电连接器(例如,图3中的302)。
30.在这种配置中,两个电池(600和602)串联连接在一起。例如,开关或其他可配置电连接器可设置或配置成使得一个电池的负连接器(例如,b1-)电连接到另一电池的正连接器(例如,b2 )。
31.与串联连接的电池(600和602)并联连接的充电器(604)对电池进行充电。在该示
例中,为了防止在充电期间从充电器(604)到电动机(606和608)的任何电流,与二极管(614和616)并联的开关(610和612)被置于充电器和每个电动机之间。在这里所示的状态中,开关(610和612)是打开的,使得从充电器到每个电动机的唯一可能路径是经由二极管,并且二极管的定向防止了任何电流在该模式下流入电动机。
32.在图3的示例中,开关(图6中的610和612)和二极管(图6中的614和616)被包括在可配置电连接器(图3中的302)中。开关(图6中的610和612)的状态(例如,打开与闭合)由图3中的电池配置控制器300来控制。
33.在图4的示例中,电池配置控制器可以闭合开关(图6中的610和612),使得电池(图4中的400和402)可以在飞行期间向电动机(图4中的404和406)供电。
34.在充电期间将电池置于如这里所示的串联配置是有帮助的,因为它降低了充电器的成本并且增加了可以使用的商业上可用的充电器的数量。例如,在其中每个电池仅向对应的电动机供电(并且配置不能改变)的上述较老的固定布置中,单个充电器能执行充电,但是商业上可用的选项很少且现有的很昂贵。如果在充电期间将上述灵活电池系统置于串联配置(例如,参见图6),则增加商业“现货供应”充电选项的数量。
35.类似地,即使可以使用单个充电器对图4所示的并联配置进行充电,但由于更高的所需电流,从导线和连接产生的热将明显增加。这意味着这种充电器将需要更耐热(并且昂贵)的组件来适应这种情况。而且,在较低电压下所需的较高电流会明显影响载具上的电线重量(例如,以适应预期流过电线的较高电流)、以及许多推进系统热性能组件(例如,其必须能够处理更多热且因此需要更昂贵的组件)。相反,如果灵活电池系统被置于串联配置(参见例如图6),则电池系统可以使用较低电流以较高电压进行充电,这对于各种原因(例如,减少导线重量、较便宜的热组件等)是更合期望的。
36.在一些实施例中,可以在预期充电时生成将电池置于该配置的配置指令。以下附图以流程图更形式地和/或一般地示出了这种情况的一个示例。
37.图7是示出了配置多个电池的过程的一个实施例的流程图,包括有响应于预期对多个电池充电而生成的配置指令将至少一些电池串联连接在一起。在一些实施例中,该过程由一些电池配置控制器(例如,图3中的300)来执行。
38.在700,接收与配置多个电池相关联的配置指令,所述多个电池向载具中的多个电动机供电,其中,配置指令是在预期对多个电池充电时生成的。
39.例如,配置指令可以响应于检测到充电端口上的某个帽或盖已被移除、或者响应于充电器的(例如,公)连接器被耦合到或插入到载具的(例如,母)充电端口中而生成。
40.在702,如配置指令所指定的那样配置多个电池,其中,能够以多种配置来配置多个电池,包括:(1)第一配置,其中,多个电池中的至少一些并联连接在一起,以及(2)第二配置,其中,多个电池中的至少一些串联连接在一起,并且响应于接收到预期对多个电池进行充电而生成的配置指令,多个电池被配置在所述第二配置中,其中,多个电池中的至少一些串联连接在一起。
41.例如,参见图6所示的配置。如图6的示例所示,在一些实施例中,电池配置控制器(例如,图3中的300)在到电动机(例如,图6中的606和608)的一些连接或输入处设置一个或多个开关(例如,图6中的610和612),使得在充电期间没有电力被供应到静止电动机。
42.在一些情况下,电池配置控制器改变开关和/或可配置电连接器以电隔离故障或
坏的电池。下面的附图描述了这种情况的一个示例。
43.图8是示出了其中坏电池被隔离的灵活电池系统的一个实施例的示意图。在所示的示例中,载具处于飞行中。在这里所示的状态之前,电池和电动机处于图4所示的配置中。在该示例中,在飞行期间,第二电池(802)坏了。如果第二电池保持与系统的其余部分电连接,则好的第一电池(800)将由于坏的第二电池(802)的较低电压而向其发送电流。然而,到坏的第二电池(802)的额外电流将仅仅使其进一步劣化(例如,更多地升温)。为了防止这种情况(或至少减轻损坏),电池配置控制器改变开关和/或可配置电连接的设置,使得第二电池与系统的其余部分电隔离(即,不再连接),如本文所示。第一电池(800)保持连接到电动机(804和806),使得两个电动机都可用于载具降落。
44.此外,这里所示的配置是有帮助的,因为所有的电动机仍然能访问电池。在其中每个电池仅向单个对应的电动机供电(并且连接不能被重新配置)的较老的固定配置中,坏的电池将导致“电动机故障”状况,因为对应的电动机(螺旋桨)将失去其电池。代替具有(作为一个示例)10个操作电动机(螺旋桨),仅9个电动机(螺旋桨)将是可操作的。相反,本文描述的灵活电池系统可以在不失去电动机(螺旋桨)的情况下隔离坏的电池。
45.该示例的另一益处是它可以比一些其他系统更快地隔离坏的电池。例如,一些其他系统可能尝试使用无源设备,诸如保险丝(例如,与每个电池串联一个),以电隔离坏的电池。当过多的电流流过保险丝和电池时,保险丝断裂并且电池被电隔离。然而,在该示例中,如果电压传感器(例如,电池两端)检测到给定电池具有低于某个电压阈值的电压,或者如果温度传感器录下了高于某个温度阈值的温度,则检测到或以其他方式标记出坏的电池。
46.类似地,在一些实施例中,系统可以被配置成响应于检测到故障(例如,在电动机控制器、推进单元等中)而(快速地)在具有某种类型的故障的电动机周围创建开路和/或电隔离该电动机。注意,如果需要,这可以在不电隔离任何电池的情况下实现。
47.在一些实施例中,存在多个温度传感器,包括与电池的(金属)壳体或容器相邻的一个或多个外部温度传感器810(其适于检测故障电池何时是靠近壳体的最外面电池之一)、以及在电池的层之间的一个或多个内部温度传感器812(例如,其适于检测故障电池何时是靠近层的中心的最里面电池之一)。
48.一旦检测到电池故障(例如,使用温度阈值和/或电压阈值),就生成适当的配置指令并将其发送到电池配置控制器,并且相应地设置开关或其他可配置电连接器(即,以隔离坏的电池)。
49.以下附图以流程图更形式地和/或一般地描述了这一点。
50.图9是示出了配置多个电池的过程的一个实施例的流程图,包括有隔离故障电池。在一些实施例中,该过程由电池配置控制器(例如,图3中的300)来执行。
51.在900,接收与配置多个电池相关联的配置指令,所述多个电池向载具中的多个电动机供电,其中,响应于检测到多个电池中的故障电池而生成配置指令。
52.例如,可以使用以下中的一个或多个在步骤900处检测故障电池:电压阈值或温度阈值(如上所述)。在一些实施例中,多个电池中的每个电池包括内部温度传感器(例如,在电池容器内部、嵌套在电池的层之间)和外部温度传感器(例如,在电池容器外部)。
53.在902,如配置指令所指定的那样配置多个电池,其中,能够以多种配置来配置多个电池,包括:(1)第一配置,其中,多个电池中的至少一些并联连接在一起,以及(2)第二配
置,其中,多个电池中的至少一些串联连接在一起,并且响应于接收到响应于检测到故障电池而生成的配置指令,多个电池被配置在第三配置中,其中,故障电池与多个电池中的其他电池隔离。例如,参见图8。
54.暂时回到图1a和1b,与在那里示出的示例性多旋翼机相关联的设计选择或约束是螺旋桨处于固定角度并且不能倾斜。因此,如果多旋翼机在空中悬停较长的时间段,考虑到载具的重心、螺旋桨的分布、螺旋桨的角度等,这给两个最前面的发动机带来了沉重的负担。相反,在所示的载具的持续高速向前飞行期间,最后部的电动机最受力。在一些实施例中,灵活电池系统以由以下附图描述的方式配置电池以及到电动机的电源(如所描述的),以更好地处理长期操作向前飞行(或者,作为替选,使用略微不同的配置进行悬停)。
55.图10a是示出了灵活电池系统的一个实施例的示意图,其中,一组电池串联连接在一起,而另一组电池并联连接在一起。如上所述,如果这里示出的多旋翼机以高速向前飞行了延长的时间段,这将对最后部的电动机施加压力,从该视图中仅示出了其中一个电动机(例如1000a)。在该示例中,为了适应这一点,电池配置控制器(未示出以保持附图的可读性)配置一个或多个开关和/或可配置电连接器(类似地未示出以保持可读性),以产生这里所示的配置。在一些实施例中,在起飞之前执行用于将系统置于该配置的决定和配置改变本身(例如,因为在飞行中改变电池配置可能是有挑战性的)。
56.第一组电池(1002a和1004a)串联连接在一起以产生较高电压电池,在这种情况下是单个电池的电压的两倍。然后,串联电池用于为(例如,左或右)最后部的电动机(1002a)供电,使得该电动机具有单个电池电压的两倍的电源。
57.其余电池(1006a、1008a和1010a)用于共同地为载具那一侧的四个最前面的电动机(1012a、1014a、1016a和1018a)供电。由于该组中的电池并联连接在一起,所以供应给这四个电动机的电压是1
×
单个电池的电压,而不是2
×
单个电池的电压。
58.暂时回到图3,应当注意,到电动机(306a和306b)的电源线(例如,m1ps 、m1ps-、m2ps 和m2ps-)来自可配置电连接器(302)。这使系统具有由一组电池(例如,图10a中的串联连接电池1002a和1004a)供电的一组电动机(例如,图10a中的1000a)和由另一组电池(例如,图10a中的并联电池1006a、1008a和1010a)供电的另一组电动机(例如,图10a中的1012a、1014a、1016a和1018a)。
59.下面的图更清楚地示出了电连接。
60.图10b是示出了由第一组电池供电的第一组一个或多个电动机和由第二组一个或多个电池供电的第二组一个或多个电动机的一个实施例的示意图。图10b继续了图10a的示例,其更清楚地示出了图10a中的电连接。
61.如上所述,两个电池(1002b和1004b)被配置成彼此串联,并且串联连接的电池被用于当多旋翼机在延长的时间段内处于以高速向前飞行模式时为最后部的电动机(1000b)供电。这种布置的好处是,串联连接的电池(1002b和1004b)的较高电压意味着需要向电动机(1000b)供应较少电流,这继而意味着电动机产生较少热。
62.其他三个电池(1006b、...、1010b)在系统的另一电独立部分中并联连接在一起。这些电池向其他四个电动机(1012b、...、1018b)供电。
63.在一些实施例中,电动机(1000b)、电动机控制器和/或螺旋桨被设计成受益于串联连接的电池(1002b和1004b)。更具体讲,静态电动机-螺旋桨组合(即,未设计成利用从1
×
至2
×
的电压升压)在电流汲取方面没有受益。必要的推力决定了所需的转矩(通过螺旋桨设计),而转矩需求决定了必要的电流(通过电动机设计)。因此,输送至电动机的三相电流(例如,在0
°
、120
°
和240
°
相位)仍然相同,但是在馈送电动机控制器的dc线路中的电流确实与电压增加成比例地降低。
64.相反,在动态和/或可配置电动机和电动机控制器组合的情况下,电动机的转矩常数可以动态地改变。例如,这可以用6相电动机(例如,在0
°
、60
°
、120
°
、...)和具有适当控制策略的电动机控制器来完成。这将降低dc线路、电动机控制器和三相线路上的电流,并因此降低热应力。
65.在一个示例性应用中,灵活电池系统被配置成处于图4所示的状态。例如,如果载具处于运动中,则电动机的瞬时或暂时浪涌(例如,当载具侧倾或执行一些其他操作时)可以由图4所示的配置更好地满足,其中,所有电池和电动机在单个电组中彼此并联。
66.相比而言,当对单个电动机(在该示例中,最后部的电动机)有持续的需求时,图10a和10b所示的配置可能更适合。在一个示例中,强风会导致某些电动机的工作负荷更大以在悬停期间维持静态位置,并且预先知道的是,载具将在其即将到来的飞行期间悬停很多。示例性多旋翼机收集实时状况(例如,风速)并且将其与预期方向和/或速度进行比较(例如,如果飞行是自主飞行)。响应于在现场状况下的预测负载,系统可以被配置(例如,在飞行之前)成使得具有最高预测负载的电动机被配置成具有串联电池。
67.在一些其他实施例中,在飞行中进行开关或配置改变。如前所述,可以测量诸如风速和/或期望的载具速度、姿态和/或推力之类的实时状况,其中,模型使用该信息来预测哪个(哪些)电动机将需要更多的功率(例如,根据强风、持续风),并且作为响应,在达到从该电动机汲取的最大功率之前重新配置系统。
68.以下附图以流程图更一般地和/或形式地描述了以上示例。
69.图11是示出了配置由第一组电池供电的第一组一个或多个电动机和由第二组一个或多个电池供电的第二组一个或多个电动机的过程的一个实施例的流程图。与上述示例一样,下面描述的过程可以由电池配置控制器来执行。
70.在1100,接收与配置多个电池相关联的配置指令,所述多个电池向载具中的多个电动机供电。例如,如果多旋翼机将在延长的时间段内在空中悬停,则图10a和10b中所示的这种配置可能是有用的。在一些实施例中,当载具悬停超过特定(即,阈值)时间量时,生成适当的配置指令。
71.在1102,如配置指令所指定的那样配置多个电池,其中,能够以多种配置来配置多个电池,包括:(1)第一配置,其中,多个电池中的至少一些并联连接在一起,以及(2)第二配置,其中,多个电池中的至少一些串联连接在一起。
72.例如,正和负电池连接器(例如,b1 、b1-、b2 和b2-)被接到图3中的可配置电连接器302,并且因此该框中的开关或其他连接器可被设置或配置成实现期望的串联和/或并联电池连接。
73.在1104,多个电动机如配置指令所指定的那样配置,其中,多个电动机能够被配置成如下那样的配置:其中,多个电动机中的第一组一个或多个电动机由多个电池中的第一组一个或多个电池来供电,并且多个电动机中的非重叠的第二组一个或多个电动机由多个电池中的非重叠的第二组一个或多个电池来供电。
74.如上所述,在一些实施例中,在步骤1104,第一组电池(其为第一组电动机供电)处于第一配置,其中,多个电池中的至少一些并联连接在一起。例如,参见图10b中的并联电池1006b-1010b。第二组电池(其为第二组电动机供电)可类似地处于第二配置,其中,多个电池中的至少一些串联连接在一起。例如,参见图10b中的串联电池1002b和1004b。
75.在一些实施例中,响应于接收到响应于与载具处于悬停模式相关联的时间超过时间阈值而生成的配置指令,电池配置控制器在图11中的步骤1104处将多个电池配置成处于其中第一组电动机由第一组电池供电并且非重叠的第二组电动机由非重叠的第二组电池供电的配置。
76.类似地,在一些实施例中,响应于接收到响应于与载具处于向前飞行模式相关联的时间超过时间阈值同时载具速度超过速度阈值(例如,载具已经比速度阈值更快地飞行了比时间阈值更长的时间)而生成的配置指令,电池配置控制器在图11中的步骤1104处将多个电池配置成处于其中第一组电动机由第一组电池供电并且非重叠的第二组电动机由非重叠的第二组电池供电的配置。
77.尽管为了清楚理解的目的已经相当详细地描述了上述实施例,但是本发明并不局限于所提供的细节。还存在实现本发明的许多替选方式。所公开的实施例是说明性的而非限制性的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。