1.本实用新型涉及消防技术领域,特别涉及一种流体输送装置的臂架结构以及消防车。
背景技术:
2.现有技术中,在高层建筑灭火情况下,采用折叠式灭火车,而折叠式灭火车需要比较大的高空作业空间。折叠式灭火车在使用时,需要将底部的四个固定支架伸出,固定支架固定后,再开始折叠伸缩;折叠时,需要先将折叠臂展开,再将灭火机构送达至指定灭火位置,开始输液灭火。
3.现有技术中,存在以下缺限:
4.1)内管伸出时,多级伸缩臂远离回转机构的一端将向下弯曲,使多级伸缩臂发生形变;
5.2)机构复杂,故障率高。
技术实现要素:
6.为此,需要提供一种流体输送装置的臂架结构以及消防车
7.为实现上述目的,本技术提供了一种流体输送装置的臂架结构,包括:第一角度传感器、第二角度传感器、控制单元、多级伸缩臂以及钢丝绞盘结构;
8.所述多级伸缩臂沿自身轴方向延长或者收缩;所述第一角度传感器和第二角度传感器分别置于所述多级伸缩臂中不同级伸缩臂上;
9.所述钢丝绞盘结构包括绞盘、支臂、滑轮和钢丝绳;所述绞盘置于所述多级伸缩臂的一端,所述多级伸缩臂另一端与所述绞盘通过所述钢丝绳连接,所述支臂设置在所述多级伸缩臂上,所述支臂远离所述多级伸缩臂的一端设置有所述滑轮,所述钢丝绳绕过所述滑轮,且所述绞盘用于收放所述钢丝绳;所述控制单元与所述第一角度传感器、第二角度传感器和绞盘电连接。
10.进一步地,还包括回转机构,所述多级伸缩臂置于所述回转机构上,且所述多级伸缩臂一端与所述回转机构铰接。
11.进一步地,所述钢丝绞盘结构还包括:多个滑轮;所述多级伸缩臂远离所述回转机构的一端上设置滑轮;
12.所述钢丝绳一端固定于所述绞盘上,所述钢丝绳另一端依次绕过支臂端部的所述滑轮、所述多级伸缩臂端部的所述滑轮以及所述支臂端部的所述滑轮,并固定于所述多级伸缩臂上。
13.进一步地,所述支臂可转动的设置在所述多级伸缩臂上。
14.进一步地,所述支臂上还设置有液压杆,所述液压杆一端与所述支臂可转动连接,所述液压杆另一端与所述多级伸缩臂可转动连接。
15.进一步地,所述多级伸缩臂中每一级伸缩臂的大小依次变小,绞盘设置在最大的
一级伸缩臂上。
16.进一步地,所述多级伸缩臂包括:第一管体、第二管体和驱动机构;所述第一管体与所述第二管体之间相互滑动嵌套;所述第二管体可伸缩的设置在所述第一管体的一端,所述驱动机构置于所述第一管体上,且所述驱动机构用于驱动所述第二管体于所述第一管体内伸缩。
17.进一步地,所述第二管体相对于所述第一管体的壁设置有螺纹,所述第一管体上设置有驱动机构,所述驱动机构包括旋转体以及连接组件,所述旋转体设置有螺纹,所述旋转体的螺纹为传力螺旋,所述第二管体的螺纹与所述旋转体的螺纹相互配合,所述连接组件用于将所述旋转体与所述第一管体之间进行轴向上的相对固定,所述旋转体可绕其自身的旋转中心旋转;
18.其中,所述旋转体被设置成当旋转体绕其自身的旋转中心旋转时,所述旋转体的螺纹与所述第二管体的螺纹做咬合运动,通过彼此螺纹咬合运动向第二管体施加轴向驱动力,使得所述第二管体相对于所述第一管体发生轴向的相对运动。
19.进一步地,所述驱动机构还包括:动力源,所述动力源用于驱动所述旋转体绕其自身的旋转中心旋转。
20.为实现上述目的,本技术提供一种消防车,包括车辆底盘、车体、以及上述任意一项实施例中的所述一种流体输送装置的臂架结构;
21.所述车体设置于所述车辆底盘上,所述车辆底盘用于向所述消防车提供动力;
22.所述流体输送装置的旋转结构设置于所述车体上。
23.区别于现有技术,上述技术方案,通过所述钢丝绞盘结构、控制单元、第一角度传感器以及第二角度传感器的设置,防止当所述多级伸缩臂向外延伸时,所述多级伸缩臂远离所述回转机构的一端向下弯曲以及形变;同时提高所述多级伸缩臂的举升高度。
附图说明
24.图1为消防车臂架第一段结构图;
25.图2为消防车臂架第二段结构图;
26.图3为所述第一管体和第二管体剖视图;
27.图4为消防车结构图;
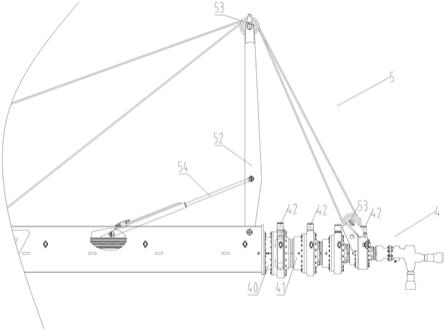
28.图5为图4中a处放大图;
29.图6为图4中b处放大图。
30.附图标记说明:
31.1、回转机构;
32.2、第一角度传感器;
33.3、第二角度传感器;
34.4、多级伸缩臂;
35.40、第一管体;
36.41、第二管体;
37.42、驱动机构;
38.420、旋转体;
39.5、钢丝绞盘结构;
40.50、绞盘;
41.51、钢丝绳;
42.52、支臂;
43.53、滑轮;
44.54、液压杆。
具体实施方式
45.为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
46.请参阅图1至图6,本实用新型公开了一种流体输送装置的臂架结构,包括:第一角度传感器2、第二角度传感器3、控制单元、多级伸缩臂4以及钢丝绞盘结构5;
47.所述多级伸缩臂4沿自身轴方向延长或者收缩;所述第一角度传感器2 和第二角度传感器3分别置于所述多级伸缩臂中不同级伸缩臂上;
48.所述钢丝绞盘结构5包括绞盘50、支臂52、滑轮53和钢丝绳51;所述绞盘50置于所述多级伸缩臂4的一端,所述多级伸缩臂4另一端与所述绞盘 50通过所述钢丝绳51连接,所述支臂52设置在所述多级伸缩臂4上,所述支臂52远离所述多级伸缩臂4的一端设置有所述滑轮53,所述钢丝绳绕过所述滑轮53,且所述绞盘50用于收放所述钢丝绳51;所述控制单元与所述第一角度传感器2、第二角度传感器3和绞盘50电连接;
49.其中,所述第一角度传感器2与第二角度传感器3分别用于检测所述多级伸缩臂4中不同级伸缩臂的角度值;所述控制单元用于计算两个角度值之差,并判断两个角度值之差是否处大于第一预设角度值;若两个角度值之差大于第一预设角度值,所述控制单元驱动所述绞盘50收紧钢丝绳51使得两个角度值之差小于第二预设角度值。
50.在某些实施例中,还包括回转机构1,所述多级伸缩臂4置于所述回转机构1上,且所述多级伸缩臂4一端与所述回转机构1铰接。
51.需要说明的是,所述回转机构1置于消防车上,所述回转机构1可以水平旋转至任意方向,且所述多级伸缩臂4随所述回转机构1转动;所述多级伸缩臂4的一端与所述回转机构1可转动连接,使所述多级伸缩臂4可绕转动连接部转动。所述多级伸缩臂4通过滑动套设的多个管体,实现所述多级伸缩臂4的伸缩功能。当所述多级伸缩臂4延伸时,所述绞盘50上的钢丝绳 51将被所述多级伸缩臂4远离所述回转机构1的一端拉出。优选的,所述第一角度传感器与第二角度传感器分别置于所述多级伸缩臂4的两端部。
52.其中,多级伸缩臂4可以根据实际伸缩的需求,布置两个以上的管体,两个以上的流体输送管体相互嵌套连接,从而延长多级伸缩臂4的长度。流体输送管体设置有容流体通过的通道。优选地,所述支臂上的滑轮置于所述多级伸缩臂的上方(相对于重力而言,即重力竖直方向上的上方),使得钢丝绳收紧时可以带动多级伸缩臂向上移动。
53.需要说明的是,请参阅图5至图6,所述第一角度传感器2和第二角度传感器3通过内置陀螺仪,测得所述多级伸缩臂4两端的角度值;具体的,所述第一角度传感器2和第二角度传感器3均以水平面为基准面,通过所述第一角度传感器2和第二角度传感器3分别测得所述多级伸缩臂4两级(可以是第一级与最后一级)与水平面的夹角(可以是倾角传感器、加
速度传感器等);优选的,所述第一角度传感器2置于所述多级伸缩臂4靠近所述回转机构1的一端,所述第二角度传感器3置于所述多级伸缩臂4远离所述回转机构1的一端。
54.需要说明的是,所述钢丝绳51从所述多级伸缩臂4上方连接所述多级伸缩臂4远离所述回转机构1的一端与所述绞盘50;所述钢丝绳51缠绕于所述绞盘50上,所述绞盘50用于收放所述钢丝绳51;在所述绞盘50的作用下,所述钢丝绳51可以调整所述多级伸缩臂4延伸后所述多级伸缩臂4远离所述回转机构1一端的角度。具体的,当所述绞盘50收紧所述钢丝绳51时,所述钢丝绳51将向上抬起所述多级伸缩臂4远离所述回转机构1一端;当所述绞盘50放出所述钢丝绳51时,所述多级伸缩臂4远离所述回转机构1一端在重力的所用下,将向下移动。
55.还需要说明的是,所述第一角度传感器2和第二角度传感器3在测出所处位置的角度信息后,将两个角度信息发送至所述控制单元内,所述控制单元通过两个角度计算得出角度差,在通过角度差判断驱动所述绞盘50收紧或者放出所述钢丝绳51。
56.在实际使用中,所述多级伸缩臂4绕旋转部转动,到达所需角度后停止,所述多级伸缩臂4向外延伸,在重力等因素的作用下,所述多级伸缩臂4远离所述回转机构1的一端会向下弯曲,使所述多级伸缩臂4产生形变;此时所述多级伸缩臂4举升的总高度变低,同时还会对所述多级伸缩造成损坏。为了防止形变,提高多级伸缩臂4伸展长度;本技术通过所述钢丝绳51的牵引,减小所述多级伸缩臂4远离所述回转机构1的形变量,同时减小所述多级伸缩臂4的挠度。
57.具体的,当所述多级伸缩臂4向外延伸时,所述第一角度传感器2和第二角度传感器3通过内置陀螺仪,测得所述多级伸缩臂4两端的角度,同时将角度信息发送至所述控制单元内;所述控制单元通过两个角度计算得出所述多级伸缩臂4两端之间的角度差,当两角度差大于第一预设角度值时(在本技术中第一预设角度值优选的为5
°
),驱动所述绞盘50作业,收紧所述钢丝绳51,当所述钢丝绳51被收紧后,所述钢丝绳51将牵引所述多级伸缩臂 4远离所述回转机构1的一端将向上移动。所述第二预设角度值时可以为零值或者负值,当角度差小于所述第二预设角度值时,所述卷盘停止收紧所述钢丝绳。当然,在某些实施例中,所述第一预设角度值可以与所述第二预设角度值相等。
58.上述技术方案,通过所述钢丝绞盘50结构5、控制单元、第一角度传感器2以及第二角度传感器3的设置,防止当所述多级伸缩臂4向外延伸时,所述多级伸缩臂4远离所述回转机构1的一端向下弯曲,使所述多级伸缩臂4 产生形变;同时提高所述多级伸缩臂4的举升高度。
59.请参阅图1至图2,在本实施中,所述钢丝绞盘50结构5还包括:支臂 52和多个滑轮53;所述支臂52可转动的设置在所述多级伸缩臂4上,所述支臂52远离转动端的一端设置有所述滑轮53,所述多级伸缩臂4远离所述回转机构1的一端上设置滑轮53,所述钢丝绳51一端固定于所述钢丝绞盘50 上,所述钢丝绳51另一端依次绕过支臂52端部的所述滑轮53、所述多级伸缩臂4端部的所述滑轮53以及所述支臂52端部的所述滑轮53,并固定于所述多级伸缩臂4的外壁上。所述支臂上的滑轮为定滑轮,所述多级伸缩臂上的所述滑轮为动滑轮。
60.需要说明的是,所述支臂52的设置为所述钢丝绳51提供一个向上的牵引力,以此减小所述钢丝绞盘50施加在所述钢丝绳51上的拉力。在所述支臂52上的所述滑轮53为两个,且两个所述滑轮53上分别设置有一根所述钢丝绳51。
61.在某些实施例中,所述多级伸缩臂中每一级伸缩臂的大小由外之内依次变小,绞盘设置在最大的一级伸缩臂上。
62.需要进一步说明的是,由于所述钢丝绳51的两端均与所述多级伸缩臂4 最大的伸缩臂连接,所述多级伸缩臂4远离所述回转机构1的一端是被两根钢丝绳51牵引,所述多级伸缩臂4端部所受的重力将被所述钢丝绳51经所述支臂52传导至所述多级伸缩臂4最大的伸缩臂上,使所述多级伸缩臂4最大的伸缩臂成为受力主体。
63.当然,在另一些实施例中,所述钢丝绞盘50结构5可以不设有所述支臂 52,即,所述钢丝绳51直接连接所述绞盘50以及所述多级伸缩臂4远离所述回转机构1的一端;所述钢丝绳51一端绕设在所述绞盘50上,另一端绕过所述多级伸缩臂4上的滑轮53固定于所述多级伸缩臂4上。当两角度差大于第一预设角度值时,所述绞盘50启动,拉动所述钢丝绳51,在较大拉力的作用下,所述多级伸缩臂4远离所述回转机构1一端将受力上抬,减小所述多级伸缩臂4发生形变。在本实施例中,还可在所述钢丝绳51上设置动滑轮减小所述绞盘50的拉力。
64.请参阅图4,在本实施例中,所述支臂52上还设置有液压杆54,所述液压杆54一端与所述支臂52可转动连接,所述液压杆54另一端与所述多级伸缩臂4可转动连接。需要说明的是,所述液压杆54驱动所述支臂522伸起,使所述支臂52与所述第多级伸缩臂4成非零夹角;优先的,当所述支臂52 伸起后与所述多级伸缩臂4相互垂直。
65.请参阅图3,在本实施例中,所述多级伸缩臂4包括:第一管体40、第二管体41和驱动机构42;所述第一管体40与所述第二管体41之间相互滑动嵌套;所述第二管体41可伸缩的设置在所述第一管体40的一端,所述驱动机构42置于所述第一管体40上,且所述驱动机构42用于驱动所述第二管体 41于所述第一管体40内伸缩。需要说明的是,在消防车中,多级伸缩臂4内是具有多个管体,且相互滑动嵌套设置,本技术以其中两个管体为例,所述第一管体40为最大的伸缩臂,第二管体41为最大的伸缩臂内的伸缩臂。因此在所述第二管体41端部同样就有驱动机构42,所述第一管体40外壁同样可有具有导向槽以及螺纹。
66.请参阅图3,在本实施例中,所述驱动机构42包括旋转体420以及连接组件,所述旋转体420设置有螺纹,所述旋转体420的螺纹为传力螺旋,所述第二管体41的螺纹与所述旋转体420的螺纹相互配合,所述连接组件用于将所述旋转体420与所述第一管体40之间进行轴向上的相对固定,所述旋转体420可绕其自身的旋转中心旋转;其中,所述旋转体420被设置成当旋转体420绕其自身的旋转中心旋转时,所述旋转体420的螺纹与所述第二管体 41的螺纹做咬合运动,通过彼此螺纹咬合运动向第二管体41施加轴向驱动力,使得所述第二管体41相对于所述第一管体40发生轴向的相对运动。所述驱动机构42还包括:动力源,所述动力源用于驱动所述旋转体420绕其自身的旋转中心旋转。所述动力源为旋转蜗轮以及蜗杆,所述蜗杆设置在所述旋转蜗轮的一侧,所述旋转蜗轮与所述旋转体420固定连接,所述蜗杆与所述旋转蜗轮相啮合。
67.需要说明的是,所述旋转体420为旋转螺母,旋转螺母上设置有内螺纹,通过旋转螺母内螺纹与所述第二管体41外螺纹的配合设置在第二管体41上。旋转螺母通过旋转螺母内螺纹与所述第二管体41外螺纹的配合,套在所述第二管体41上,只要可以驱动旋转螺母的转动,就可以控制所述第二管体41 在第一管体40内的伸缩。
68.还需要说明的是,所述旋转体420一侧设置有所述动力源,动力源用于驱动所述旋
转体420转动。所述动力源包括旋转蜗轮以及蜗杆,蜗杆设置在旋转蜗轮的一侧,旋转蜗轮与旋转螺母固定连接,蜗杆与旋转蜗轮相啮合。此时,通过蜗轮与蜗杆的配合,可以利用蜗轮蜗杆减速机的原理,利用齿轮的速度转换,将电机或马达的回转数减速到所要的回转数,并得到较大转矩,便于驱动旋转螺母的转动。在其他实施例中,旋转蜗轮与蜗杆可以被旋转齿盘与齿轮代替,齿轮设置在旋转齿盘的一侧,旋转齿盘与旋转螺母固定连接,齿轮与旋转齿盘相啮合。此时,只要驱动齿轮的转动,即可驱动旋转螺母的转动,也在本实施例的保护范围内。
69.在其他实施例中,旋转蜗轮与蜗杆可以被旋转摩擦盘与摩擦轮替代,摩擦轮设置在旋转摩擦盘的一侧,旋转摩擦盘与旋转螺母固定连接,摩擦轮与旋转摩擦盘相接触。此时,只要驱动摩擦轮的转动,即可驱动旋转螺母的转动,也在本实施例的保护范围内。
70.还需要说明的是,蜗杆、齿轮或摩擦轮由液压马达、气动马达、电机,其中任意一种提供动力。在某些实施例中,所述驱动机构42还包括盖体,盖体用于遮蔽驱动机构42。此时,盖体用于对驱动机构42防尘、防水。
71.所述连接组件包括轴承,所述轴承的一侧与所述第一管体40的轴向位置上固定连接,所述轴承的另一侧活动支撑所述旋转体420。
72.在实际使用中,所述驱动机构42使用过程为:开启动力源,动力源驱动蜗杆转动,蜗杆带动旋转蜗轮旋转,旋转蜗轮带动旋转体420旋转,从而实现第二管体41在第一管体40内的伸缩,然后再第一管体40内输液体,从而对着火点进行灭火。灭火完成后,通过动力源驱动蜗杆转动,对第二管体41 收回,完成操作。
73.在某些实施例中,所述驱动机构42包括连接组件,所述连接组件用于将所述旋转体420与所述第一管体40之间进行轴向上的相对固定。所述连接组件包括轴承,所述轴承的一侧与所述第一管体40的轴向位置上固定连接,所述轴承的另一侧活动支撑所述旋转体420。
74.需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型的专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。