1.本发明涉及一种基于深度学习的指挥控制网络关键节点识别方法,属于深度学习领域。
背景技术:
2.指挥控制网络关键节点识别是支撑指挥控制体系博弈的重要组成部分和决定作战结果的关键因素。通过干扰或者打击指挥控制网络关键节点,能有有效抑制敌方对于战场态势的获取,从而压制敌方的决策空间,使得我方在指挥控制体系博弈中获得信息优势。
3.现阶段大多指挥控制网络关键节点识别方法主要依赖于专业知识设计目标函数和检测特征,在《面向结构洞的指挥控制网络关键节点识别方法》一文中,在提取指挥控制网络关键节点特征方面具有局限性,需要大量人工参与,并且受到专业背景的影响,导致检测效果有限;同时,传统节点识别方法的评判指标固定,如公开号为cn113411197a的专利《一种无先验拓扑信息的非合作关键节点识别方法》,无法通过学习机制不断提升检测效果;在《基于改进灰狼优化的复杂网络重要节点识别算法》一文中,基于优化算法的指挥控制网络关键节点识别方法的计算量较大,会较大幅度提高指挥控制的决策产生时间,从而影响博弈效果。
技术实现要素:
4.本发明避免背景技术中的问题提出了一种基于深度学习的指挥控制网络关键节点识别方法,该方法构建了适用于指挥控制网络关键节点识别的深度学习卷积神经网络,通过将指挥控制网络中节点的互通次数和通信类型转换为多维数据矩阵,便于神经网络提取识别特征。
5.本发明采用的技术方案为:
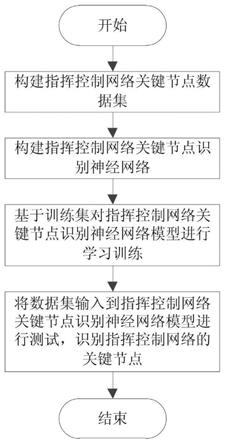
6.一种基于深度学习的指挥控制网络关键节点识别方法,包括以下步骤:
7.步骤1:构建指挥控制网络关键节点数据集;
8.步骤2:基于最小指挥控制网络关键节点识别神经网络模块和分类神经网络模块,构建指挥控制网络关键节点识别神经网络模型;
9.步骤3:基于训练集对指挥控制网络关键节点识别神经网络模型进行学习训练;
10.步骤4:将测试集输入到指挥控制网络关键节点识别神经网络模型进行测试,识别指挥控制网络的关键节点。
11.其中,步骤1中,构建指挥控制网络关键节点数据集的具体方式为:
12.步骤1-1:基于指挥控制网络结构、关键指挥控制节点和通信方式,统计在t次通信下,任意两节点之间,不同通信方式下的互通次数其中n和m分别为通信节点标号,n,m∈n,n为通信节点数,l表示通信方式种类索引,l∈l,l为通信方式种类,t为设定值;
13.步骤1-2:将互通次数数据转换成多维矩阵形式组成样本i:
[0014][0015]
步骤1-3:将关键通信节点标号y作为对应样本的标签;
[0016]
步骤1-4:在指挥控制网络结构相同但关键指挥控制结点不同的情况下,重复步骤1-1到1-3t次,组成数据集,包括样本数据集和标签数据集;其中t为设定值;
[0017]
样本数据集x为:
[0018][0019]
标签数据集y为:
[0020]
y=[y1…yt
]
t
[0021]
步骤1-5:按照设定比例μ,将数据集切分为学习数据集和测试数据集,二者数量分别为和其中表示向上取整。
[0022]
学习数据集的样本数据集为x
′
,维度为
[0023]
学习数据集的标签数据集为y
′
,维度为
[0024]
测试数据集的样本数据集为x
″
,维度为
[0025]
测试数据集的标签数据集为y
″
,维度为
[0026]
其中,步骤2中,构建指挥控制网络关键节点识别神经网络的具体方式为:
[0027]
步骤2-1:搭建最小指挥控制网络关键节点识别神经网络模块;
[0028]
最小指挥控制网络关键节点识别神经网络模块,内部分为主线和支线;数据流向为:输入样本数据分别经过主线和支线并行处理后相加,经过非线性激活层之后得到输出;
[0029]
主线依次包含二维卷积层、归一化层、非线性激活层、二维卷积层、归一化层和squeeze-and-excitation层,其中squeeze-and-excitation层包括全连接层、非线性激活层和全连层;支线包含二维卷积层和归一化层;
[0030]
步骤2-2:搭建分类神经网络模块:
[0031]
分类神经网络模块依次包含dropout层、全连接层、非线性激活层、dropout层、全连层、非线性激活层和全连层;
[0032]
步骤2-3:搭建指挥控制网络关键节点识别神经网络:
[0033]
通过将最小指挥控制网络关键节点识别神经网络模块和分类神经网络模块串行组合,并添加支线构成指挥控制网络关键节点识别神经网络;神经网络主体结构由三个最
小指挥控制网络关键节点识别神经网络模块和一个分类神经网络模块串行构成,在四个模块连接之间插入三条相同的前向支路,前向支路由二维卷积层和归一化层构成。
[0034]
其中,步骤3中,基于训练集对指挥控制网络关键节点识别神经网络模型进行学习训练的具体方式为:
[0035]
步骤3-1:前向传播
[0036]
将多批样本数据x
″′
依次通过指挥控制网络关键节点识别神经网络得到预测的标签数据z的对应概率,其过程描述为z=f(x
″′
),其中基于学习数据集将b个样本学习数据构建为批样本学习数据x
″′
和批样本学习数据标签y
″′
,维度分别为b
×
l
×n×
n和b,b为批数量;f代表指挥控制网络关键节点识别神经网络的数学处理过程;
[0037]
步骤3-2:定义损失函数:
[0038]
损失函数依据预测的标签数据z和标签数据y
″
的差距定义,给出二者之间的误差。
[0039]
步骤3-3:依据损失函数计算误差,根据误差进行反向传播,并对神经网络参数优化;
[0040]
步骤3-4:在测试数据集中评估神经网络的预测正确率,保存正确率最优的神经网络模型和参数。
[0041]
其中,步骤4中,将数据集输入到指挥控制网络关键节点识别神经网络模型进行测试,识别指挥控制网络的关键节点的具体方式为:
[0042]
步骤4-1:加载保存的神经网络模型及参数:
[0043]
步骤4-2:将测试数据集输入到指挥控制网络关键节点识别神经网络模型,得到关键节点对应的标号,实现指挥控制网络的关键节点的识别。
[0044]
本发明相比现有技术具有如下优点:
[0045]
本发明提高了神经网络提取特征的效果和在指挥控制网络关键节点识别上的适应性。
[0046]
本发明可适用于各类指挥控制网络结构中关键节点的检测和识别,为指挥控制网络关键节点识别提供新思路和新方法,提升指挥控制回路的态势判断能力,为指挥控制体系博弈策略的决策制定提供可靠的技术支撑。
附图说明
[0047]
图1为本发明实施例方法的流程图。
[0048]
图2为本发明实施例中指挥控制网络结构、关键节点和通信方式示意图。
[0049]
图3本发明实施例中多维矩阵示意图。
[0050]
图4为本发明实施例中的最小指挥控制网络关键节点识别神经网络模块结构图。
[0051]
图5为本发明实施例中的分类神经网络模块结构图。
[0052]
图6为本发明实施例中的指挥控制网络关键节点识别神经网络结构图。
[0053]
图7为本发明实施例中的基于混淆矩阵的识别结果图。
具体实施方式
[0054]
下面结合附图和具体实施方式对本发明做进一步说明。
[0055]
一种基于深度学习的指挥控制网络关键节点识别方法,其整体流程如图1所示。
[0056]
具体包括如下步骤:
[0057]
步骤1:构建指挥控制网络关键节点数据集。
[0058]
步骤1-1:基于如图2所示的指挥控制网络结构、关键指挥控制节点和通信方式,统计在t=1000次通信下,任意两节点之间,不同通信方式下的互通次数其中n和m分别为通信节点标号,n,m∈n,节点数n=5,l表示通信方式种类索引,共l=3种通信方式。
[0059]
步骤1-2:如图3所示,将互通次数数据转换成多维矩阵形式组成样本i:
[0060][0061]
步骤1-3:将关键通信节点标号y,y∈[1,5]作为对应样本的标签;
[0062]
步骤1-4:在指挥控制网络结构相同但关键指挥控制结点不同的情况下,重复步骤1-1到1-3,生成不同指挥控制网络结构中关键节点的互通次数,每个通信节点重复1000次统计,共重复t=5000次,组成数据集,包括样本数据集和标签数据集,并将数据集随机打乱。
[0063]
样本数据集x为:
[0064][0065]
标签数据集y为:
[0066]
y=[y1…yt
]
t
,y
t
∈[1,5]
[0067]
其中y
t
是5000次标签数据的对应索引,即通信节点编号。
[0068]
步骤1-5:构建学习数据集和测试数据集。按照比例μ=0.98,将数据集切分为学习数据集和测试数据集,二者数量分别为个和个,其中表示向上取整。
[0069]
学习数据集的样本数据集为x
′
,维度为
[0070]
学习数据集的标签数据集为y
′
,维度为
[0071]
测试数据集的样本数据集为x
″
,维度为
[0072]
测试数据集的标签数据集为y
″
,维度为
[0073]
步骤2:构建指挥控制网络关键节点识别神经网络。
[0074]
步骤2-1:搭建最小指挥控制网络关键节点识别神经网络模块f,如图4所示。最小指挥控制网络关键节点识别神经网络模块,内部分为主线和支线。数据流向为:输入样本数
据分别经过主线和支线并行处理后相加,经过非线性激活层之后得到输出。主线包含二维卷积层、归一化层、非线性激活层和squeeze-and-excitation层,其中squeeze-and-excitation层包括二元自适应均值汇聚层、全连接层和非线性激活层。支线包含二维卷积层和归一化层。
[0075]
步骤2-2:搭建分类神经网络模块f
′
,如图5所示。分类神经网络模块包含dropout层、全连接层、非线性激活层、dropout层、全连层、非线性激活层和全连层。
[0076]
步骤2-3:搭建指挥控制网络关键节点识别神经网络f。通过将最小指挥控制网络关键节点识别神经网络模块和分类神经网络模块串行组合,并添加支线构成指挥控制网络关键节点识别神经网络;神经网络主体结构由三个最小指挥控制网络关键节点识别神经网络模块和一个分类神经网络模块串行构成,在四个模块连接之间插入三条相同的前向支路,前向支路由二维卷积层和归一化层构成,如图6所示。
[0077]
步骤3:基于训练集对指挥控制网络关键节点识别神经网络模型进行学习训练。
[0078]
步骤3-1:前向传播。
[0079]
将多批样本数据x
″′
依次通过指挥控制网络关键节点识别神经网络得到预测的标签数据z的对应概率,其过程描述为z=f(x
″′
),其中基于学习数据集将b个样本学习数据构建为批样本学习数据x
″′
和批样本学习数据标签y
″′
,维度分别为b
×
l
×n×
n和b,b为批数量,实施例中取64;f代表指挥控制网络关键节点识别神经网络的数学处理过程;
[0080]
步骤3-2:选择交叉熵函数为损失函数。
[0081]
失函数依据预测的标签数据z和标签数据y
″
的差距定义,给出二者之间的误差。
[0082]
步骤3-3:依据交叉熵函数计算误差,批训练的误差为:
[0083][0084]
其中p为求取对应标签的概率分布,z为多批样本数据x
″′
中单个样本数据x
″′
指挥控制网络关键节点识别神经网络f得到预测的标签数据的对应概率。
[0085]
根据误差进行反向传播,并对神经网络参数优化。
[0086]
步骤3-4:在测试数据集中评估神经网络的预测正确率,即统计测试数据集的样本数据经过神经网络f输出的最大概率对应的估计标签。如果估计标签与标签数据相同,则结果为1;如果估计标签与标签数据不相同,则结果为0。对所有测试数据集进行上述操作后,将结果累加除以测试数据集中的数量,即100。保存正确率最优的神经网络模型和参数,即f
′
。
[0087]
步骤4:将测试集输入到指挥控制网络关键节点识别神经网络模型进行测试,识别指挥控制网络的关键节点。
[0088]
步骤4-1:加载保存的神经网络模型及参数f
′
:
[0089]
步骤4-2:将测试数据集x
″
输入到指挥控制网络关键节点识别神经网络模型,即f
′
(x
″
)。通过label_max[f
′
(x
″
)],得到关键节点对应的标号,定义label_max为求取最大概率所对应的标签。识别结果以混淆矩阵的方式给出,如图7所示,有识别出了指挥控制网络的关键节点。
[0090]
综上所述,本发明通过产生样本数据集、构建训练样本集和测试样本集、构建指挥控制网络节点识别神经网络模型、基于训练集对指挥控制网络节点识别神经网络模型进行
学习训练和将测试集输入到指挥控制节点识别神经网络模型进行测试,输出待识别的指挥控制网络关键节点,准确地判断指挥控制关键节点。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。