1.本发明涉及线扫相机技术领域,尤其涉及一种激光测距矫正线扫相机与测量点位置的方法。
背景技术:
2.随着社会与科技的不断进步,工业生产的规模与自动化程度也随之不断提高,例如对生产的工件进行扫描检测和分类时,可以采用较为自动化的方式进行,在此过程中就需要用到线扫相机,线扫相机又叫线扫描相机,其可以对工件的表面进行扫描,并通过计算机系统对其进行比对,从而可以完成对工件的检测和分类,提升工件生产的效率与准确率。
3.在实际生产过程中,产品的机械安装往往存在一定误差,或者产品自身高度不协调,表面不够平整,使得线扫相机在使用过程中其理想图像采集的平面与实际图像采集平面在一些范围内存在偏差,而两个平面之间的高度差超过当前的景深,就会造成部分区域的存在视角差,进而线扫相机获得目标图像质量就不够理想,导致测量和检测的结果与实际存在一定的偏差,测量和检测的结果不够准确,无法对目标产品做出正确的测量或检测。现有工业应用中,相机与定位工件平面一般通过机械调平配合机械定位的方式进行调平处理,整体调平难度系数大、耗时长等问题,而且部分产品自身表面存在翘曲等问题,采用一般机械压平时,容易导致机械压平部分与产品之间的压力和摩擦较大,进而容易对产品造成压痕甚至划伤等情况,给产生的制造带来新的问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种激光测距矫正线扫相机与测量点位置的方法。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种激光测距矫正线扫相机测量点位置的方法,包括以下步骤:
7.s1、设备初始化,将线扫相机自适应采集系统安装在设备上,将驱动部分全部复位,硬件模块初始化;
8.s2、测量准备,根据设计安装高度调整线扫相机焦距,以及实施外部补光等操作;
9.s3、设备调试,调整激光发生器的位置,确保激光测量位置在产品上,且两个测量点不可以重合,在视野测量产品上距离越远越准确,调整完成后设定两个激光发生器的初始距离;
10.s4、运行系统,启动线扫相机自适应采集系统,实时测量当前测量位置变化,反馈给视觉收集部分和计算部分进行比对运算,得到的位置补偿数据由驱动部分进行修正,确保相机与测量位置保持相应的位置关系;
11.上述激光测距矫正线扫相机测量点位置过程中所使用到的线扫相机自适应采集系统包括图像采集模块、激光测距模块、位置调整模块和计算机处理模块,所述图像采集模块用于对产品实施图像采集,所述激光测距模块用于对图像采集模块与产品之间的相对位
置进行测量,所述位置调整模块用于驱动图像采集模块进行调整,所述计算机处理模块用于对激光测距模块测量的位置与初始状态进行比对以及控制位置调整模块带动图像采集模块的位置进行调整。
12.优选地,所述图像采集模块包括相机主体和镜头,所述激光测距模块包括第一激光测距仪和第二激光测距仪,所述图像采集模块和激光测距模块的外部安装有保护外壳,且外壳上设置有补光机构,并且保护外壳通过连接件安装在一组可以移动和转动的底座上。
13.优选地,所述第一激光测距仪和第二激光测距仪上分别安装有进行位置移动的驱动部分,且第一激光测距仪和第二激光测距仪通过同轴导光机构保证激光测量点可以在视野内进行测距。
14.优选地,所述位置调整模块包括第一电机、第二电机和第三电机,且第一电机、第二电机和第三电机的输出端分别通过辅助调节机构与图像采集模块和激光测距模块连接,并且第一电机、第二电机和第三电机上分别设置有制动机构。
15.优选地,所述计算机处理模块包括视觉与运控处理模块,且计算机处理模块分别与图像采集模块、激光测距模块、位置调整模块电性连接,并且计算机处理模块上设置有触控面板。
16.本发明具有以下有益效果:
17.1、通过线扫相机自适应采集系统包含图像采集模块,激光测距模块,位置调整模块,计算机处理模块,使得图像采集模块在对产品的表面进行图像采集时,可以通过激光测距模块进行测距矫正,并通过计算机处理模块控制位置调整模块带动图像采集模块实时调整其位置,从而可以避免因测量平面与相机不平行或高度不稳定而引起的图像不清晰,从而导致微小缺陷的漏检或分类错误;
18.2、通过计算机处理模块分别与图像采集模块,激光测距模块以及位置调整模块的电性连接,使得图像采集模块和激光测距模块可以将实时采集的图像和位置信息输送至计算机处理模块,计算机处理模块经过比对运算后可以自动控制位置调整模块对图像采集模块的位置进行对应调整,整个过程中通过计算机处理模块进行运算协调,从而使得整体自动化程度较高。
附图说明
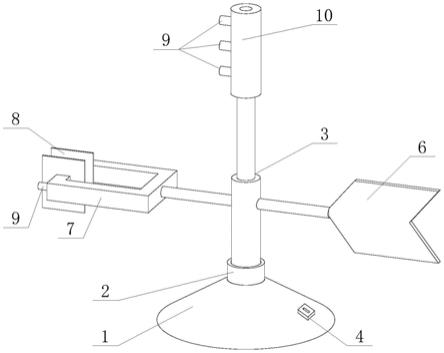
19.图1为本发明提出的线扫描自适应测量面系统的组成结构示意图;
20.图2为本发明提出的线扫描自适应测量面系统的工作流程示意图。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
22.一种激光测距矫正线扫相机测量点位置的方法,包括以下步骤:
23.s1、设备初始化,将线扫相机自适应采集系统安装在设备上,将驱动部分全部复位,硬件模块初始化;
24.s2、测量准备,根据设计安装高度调整线扫相机焦距,以及实施外部补光等操作;
25.s3、设备调试,调整激光发生器的位置,确保激光测量位置在产品上,且两个测量点不可以重合,在视野测量产品上距离越远越准确,调整完成后设定两个激光发生器的初始距离;
26.s4、运行系统,启动线扫相机自适应采集系统,实时测量当前测量位置变化,反馈给视觉收集部分和计算部分进行比对运算,得到的位置补偿数据由驱动部分进行修正,确保相机与测量位置保持相应的位置关系;
27.参照图1-2,上述激光测距矫正线扫相机测量点位置过程中所使用到的线扫相机自适应采集系统包括图像采集模块、激光测距模块、位置调整模块和计算机处理模块,图像采集模块用于对产品实施图像采集,激光测距模块用于对图像采集模块与产品之间的相对位置进行测量,位置调整模块用于驱动图像采集模块进行调整,计算机处理模块用于对激光测距模块测量的位置与初始状态进行比对以及控制位置调整模块带动图像采集模块的位置进行调整。
28.需要说明的是,图像采集模块包括相机主体和镜头,激光测距模块包括第一激光测距仪和第二激光测距仪,图像采集模块和激光测距模块的外部安装有保护外壳,且外壳上设置有补光机构,并且保护外壳通过连接件安装在一组可以移动和转动的底座上,保护外壳可以对图像采集模块和激光测距模块进行连接和保护,使得图像采集模块和激光测距模块可以一同安装在底座上,进而使得底座活动时可以带动图像采集模块和激光测距模块进行活动,图像采集模块上的镜头部分、激光测距模块上的第一激光测距仪和第二激光测距仪的激光发射区域分别从保护外壳中伸出,从而使得图像采集模块和激光测距模块可以分别实施实时图像采集和激光测距,进而配合完成后续操作。
29.第一激光测距仪和第二激光测距仪上分别安装有进行位置移动的驱动部分,且第一激光测距仪和第二激光测距仪通过同轴导光机构保证激光测量点可以在视野内进行测距,使得第一激光测距仪和第二激光测距仪可以分别进行移动,进而使得其之间的间距发生变化,从而在面对部分产品进行测距时,可以通过调整第一激光测距仪和第二激光测距仪之间的间距保证发射的两组激光不会处于同一位置处,进而可以针对产品测算出图像采集模块与产品之间的相对位置,从而便于后续生成初始状态位置信息的比对模型。
30.位置调整模块包括第一电机、第二电机和第三电机,且第一电机、第二电机和第三电机的输出端分别通过辅助调节机构与图像采集模块和激光测距模块连接,并且第一电机、第二电机和第三电机上分别设置有制动机构,使得第一电机、第二电机和第三电机可以带动图像采集模块和激光测距模块的底座进行多方位活动,从而可以根据产品的形状和位置对图像采集模块和激光测距模块的位置进行调整,使得其处于对应位置上,进而使得图像采集模块采集的图像具有比对价值,同时第一电机、第二电机和第三电机为伺服电机,可以进行往复转动,从而配合辅助调节机构进行往复方向上的调节,并且在调节完成后,第一电机、第二电机和第三电机上的制动机构可以分别带动其输出轴部分进行固定,进而保证图像采集模块和激光测距模块调整后的稳固性,从而保证后续图像采集模块采集图像的清晰,激光测距模块测量位置信息的准确性。
31.计算机处理模块包括视觉与运控处理模块,且计算机处理模块分别与图像采集模块、激光测距模块、位置调整模块电性连接,并且计算机处理模块上设置有触控面板,使得图像采集模块和激光测距模块采集的图像和测量的位置信息可以通过电信号的方式传输
至计算机处理模块上,计算机处理模块包括视觉与运控处理模块,视觉与运控模块中的运控部分是将激光反馈的高度变化反馈给计算机处理模块,计算得到的电机矫正参数发给执行电机校正相机理论位置,视觉与运控模块中的运控部分用于协助获取质量较好的图像,而视觉处理模块会根据采集到的图像进行一些具体的分析,从而配合后续识别检测。
32.该方法在实施时,如图1-2所示,将线扫相机自适应测量面系统通过螺杆等可拆卸的方式安装在生产设备上,方便后续进行拆卸维护,其中图像采集模块和激光测距模块通过其外部的保护壳安装在活动底座上,通过计算机处理模块上设置有触控面板,第一电机、第二电机和第三电机的输出端分别通过辅助调节机构与图像采集模块和激光测距模块上的底座连接,以及计算机处理模块分别与位置调整模块上第一电机、第二电机和第三电机的电性连接,通过触控面板控制第一电机、第二电机和第三电机带动图像采集模块和激光测距模块调整至初始位置处,通过图像采集模块上设置有补光机构,将补光机构打开,将图像采集模块上的镜头根据产品位置调整至指定焦距,便于后续相机主体能够获取足够清晰的图像,同时打开激光测距模块上的第一激光测距仪和第二激光测距仪,通过第一激光测距仪和第二激光测距仪上分别安装有进行位置移动的驱动部分,且第一激光测距仪和第二激光测距仪通过同轴固件的方式进行安装,通过该驱动部分控制第一激光测距仪和第二激光测距仪进行移动,直至第一激光测距仪和第二激光测距仪发射的激光可以同时照射至产品上,并且照射点为不重合状态,通过计算机处理模块与激光测距模块的电性连接,操作人员可以通过计算机处理模块上的触控面板将此时的第一激光测距仪和第二激光测距仪设置为初始比对状态,激活整个线扫相机自适应采集系统,当产品放置在被测量位置时,激光测距模块可以通过第一激光测距仪和第二激光测距仪发生的激光对实时距离进行测算,并将数据以电信号的方式传导至计算机处理模块上,图像采集模块可以将采集的图像以电信号的方式传导至计算机处理模块上,计算机处理模块上的视觉与运控处理模块通过解码将电信号重新转换成位置和图像信息并与初始状态进行比对,当位置信息与初始状态对应时,视觉与运控处理模块将图像信息进一步进行比对,对产品实施检测与测量,当位置信息与初始状态不对应时,视觉与运控处理模块通过运输得出调整方向与幅度并向位置调整模块发送调整命令,位置调整模块通过其上的第一电机、第二电机和第三电机带动底座发生对应活动,同时激光测距模块实时进行工作,并将位置信息实时输送至计算机处理模块,直至位置信息与预期符合,此时图像采集模块再次采集图像并输送至计算机处理模块供其进行后续比对检测和测量;
33.具体的,该方法可以应用于面板制造业手机、平板电脑等显示面板的高精度缺陷检测和分类,现有的显示屏面板在检验时一般是依靠人工进行目测焊接完毕的电路板,检查是否有无虚焊短路现象,相较于现有方式该方法由于不是依靠人为目测,准确率与效率更高,且更加节省生产过程中的人工成本;
34.具体的,该方法可以应用于半导体制造业晶圆上微小缺陷的高精度检测和分类,现有的半导体制造业晶圆上微小缺陷在检验时一般是采用多个工业相机配合,以及通过转盘带动晶圆转动进行检测,该方法在使用时可以只使用一组,在使用过程中,将计算机处理模块上的初始位置信息设置为多组,通过转盘带动晶圆转动,该方法在针对不同面进行检测时,可以采用不同初始位置信息对图像采集模块采集模块进行调整,从而减少检测设备的使用量,进而避免检测过程过于复杂,设备成本较高;
35.具体的,该方法可以应用于轴承、凸轮等曲面的高精度检测和分类,现有轴承、凸轮等曲面检测时一般是采用机械定位的方式进行,在实际使用过程中,需要逐一对轴承或者凸轮等进行固定,并通过检测部分对其进行贴合检测,整个过程较为繁琐,使用该方法时可以直接采用图像采集模块采集对应位置处的图片信息,并通过计算机处理模块对采集的图片与预期产品的图片进行后续比对,不需要对轴承、凸轮等产品进行固定并调整检测部分与产品贴合进行检测,更加方便快捷。
36.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。