1.本发明涉及图像识别计算领域,具体涉及一种锆合金高温氧化显微组织图片识别方法、系统、存储介质。
背景技术:
2.核能是一种清洁高效能源,发展核能是当前我国坚定不移的能源发展战略方针。核燃料元件是核反应堆的屏障核心部件,对反应堆安全性和可靠性有极其重要的影响,包壳是核反应堆的第一道安全。锆合金由于具有低的热中子吸收截面、良好的耐腐蚀性能以及适中的力学性能,是当前水冷核反应堆唯一采用的燃料元件包壳材料,而研究锆合金的氧化规律和高温氧化对锆合金材料性能的影响可以为以锆合金作为燃料元件包壳设计以及反应堆在假想lcoa下的安全评价提供指导和参考依据。
3.在研究锆合金的氧化规律和高温氧化对锆合金材料性能的影响过程中,需要研究者准确分析锆合金在不同氧化气氛、氧化温度、氧化时间下,氧化组织中α相、β相所占比例,并完成氧化膜厚度测量。现有的操作方式为:研究者制备样品后,将样品的待分析面朝向显微镜物镜放置的载物台上,采集并保持待分析的金相照片;然后将待分析的金相图片与专用的数据库中的图片一一比对进行识别,并进行α相、β相面积计算和占比计算,然后输出进行了各相标记的图片及计算结果供研究者分析。此过程不但耗费时间,还会因为人为因素导致图片识别误差,进而导致输出的图片与实际的图片符合度较差,且计算结果也不准确。
技术实现要素:
4.本发明所要解决的技术问题是现有的锆合金高温氧化显微组织的图片识别过程耗时,且输出结果不准确,影响研究者研究,不能为以锆合金作为燃料元件包壳设计以及反应堆在假想lcoa下的安全评价提供准确的指导和参考依据。目的在于提供一种锆合金高温氧化显微组织图片识别方法、系统、存储介质,以解决以上问题。
5.本发明通过下述技术方案实现:
6.本发明的第一个目的是提供一种锆合金高温氧化显微组织图片识别方法,包括
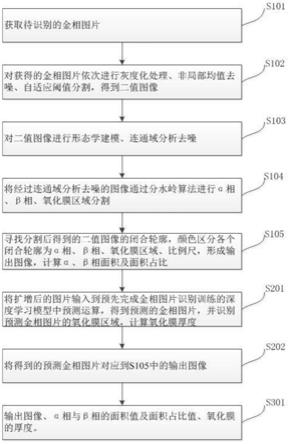
7.s101:获取待识别的金相图片;
8.s102:对获得的金相图片依次进行灰度化处理、非局部均值去噪、自适应阈值分割,得到二值图像;
9.s103:对二值图像进行形态学建模、连通域分析去噪;
10.s104:将经过连通域分析去噪的图像通过分水岭算法进行α相、β相、氧化膜区域分割;
11.s105:寻找分割后得到的二值图像的闭合轮廓,颜色区分各个闭合轮廓为α相、β相、氧化膜区域、比例尺,形成输出图像,并计算各α相、β相的面积及α相、β相的面积占比;
12.s201:将待识别的金相图片扩增后输入到预先完成金相图片识别训练的深度学习模型中预测运算,得到预测的金相图片,并识别预测金相图片的氧化膜区域,计算氧化膜厚
度;
13.s202:将得到的预测金相图片对应到s105中的输出图像;
14.s301:输出图像、α相与β相的面积值及面积占比值、氧化膜的厚度。
15.可选地,所述深度学习模型采用cnn架构的卷积神经网络模型。
16.可选地,所述s201中识别预测金相图片氧化膜区域的方法为:
17.定义卷积神经网络参数θ={θ1,θ2,θ3…
θn};
18.在进行识别训练过程中,利用以下迭代公式更新所述卷积神经网络参数:
[0019][0020]
其中θj代表θj:的迭代,代表一阶导数,lb代表分割损失函数,所述分割损失函数lb用于预测输入到深度学习模型中的待识别的金相图片分割的金相边界与识别训练的金相图片分割的金相边界的重合程度;
[0021]
然后对训练好的卷积神经网络的最后一层进行softmax概率预测,进而预测所得到的预测金相图片的各像素点分类,softmax概率预测值最大的区域即为氧化膜区域;
[0022][0023]
其中xi代表预测的预测金相图片各像素点x属于i类的值,各个预测金相图片的所有像素点分类的softmax概率预测值之和为1。
[0024]
可选地,所述分割的金相边界包括分割的α相、β相、氧化膜区域边界;
[0025]
所述分割损失函数lb的计算过程为:
[0026]
定义金相边界分割过程中的精确率
[0027]
召回率
[0028]
其中b(x)=x-minpool(x);
[0029]
代表金相图片的真实标签,y
pr
代表分割得到的金相图片的预测值,minpool表示最小池化,代表金相图片各相的真实边界,代表金相图片各相的预测边界,sum代表求运算的矩阵和;
[0030]
根据所述精确率p和召回率r计算分割边界的调和平均分数得金相图片的边界损失函数将边界损失函数与交叉熵函数lc进行加法运算,即得分割损失函数lb,其中:
[0031]
调和平均分数
[0032]
边界损失函数
[0033]
分割损失函数ωb,ωc分别代表边界损失函数和交叉熵函数lc的超参数。
[0034]
可选地,所述ωb为0.5,所述ωc为1.0。
[0035]
可选地,所述s201中计算氧化膜厚度的计算方法为:
[0036]
将识别到的氧化膜区域内的像素点提取,并定义氧化膜像素点集合为{(x1,y1),(x2,y2),
…
(xn,yn)},使用n根线与像素点集合相交,计算与各根线相交的像素点数量之和n,氧化膜厚度
[0037]
其中,所述氧化膜像素点集合中的(xn,yn)代表预测金相图片中各个像素点的坐标,各根线为沿空间坐标轴x平行的线,各根线的坐标方程集合为{x=x1,x=x2,
…
x=xn}。
[0038]
可选地,所述深度学习过程包括:
[0039]
将经扩增得到的金相图片输入到在深度学习模型的imagenet数据集上预训练好的resnet101网络中,提取各金相图片的特征向量;
[0040]
将各金相图片的特征向量输入至特征注意力模块fpa中,获得不同尺寸的金相图片的特征信息,将这些特征信息与经卷积处理的原始特征向量融合,记为向量a1;
[0041]
将resnet101网络上的三个不同阶段的特征向量通过全局注意力上采样模块gau处理,得到b1、b2、b3向量;
[0042]
将b1、b2、b3向量分别与向量a1先乘后加运算,再进行上采样处理,得到预测的金相图片。
[0043]
可选地,所述s105中,对于寻找到的每个闭合轮廓内的像素点计数;
[0044]
计算每个闭合轮廓同轴度,将同轴度小于设定阈值threshold的闭合轮廓标记为α相,同轴度大于等于设定阈值threshold的闭合轮廓标记为β相,分别将同属于α相或β相的每个闭合轮廓的像素点数量相加,即得α相或β相的面积,并将各α相或β相的闭合轮廓标注不同的颜色;
[0045]
本发明的第二个目的是提供一种锆合金高温氧化显微组织图片识别系统,包括:
[0046]
图片获取模块,用于获取待识别的金相图片;
[0047]
图片处理模块,通信连接所述图片获取模块,用于对待识别的金相图片进行灰度化处理、非局部均值去噪、自适应阈值分割,以得到二值图像,同时通过形态学建模、连通域分析去噪对二值图像进行降噪处理,对降噪处理的二值图像采用分水岭算法进行相分割,对分割后的二值图像的闭合轮廓进行颜色标注,形成输出图像,并对各闭合轮廓内的像素点计数得到α相或β相的面积、α相、β相的面积占比;
[0048]
图像扩增模块,通信连接所述图片获取模块,用于将获取的待识别的金相图片进行扩增;
[0049]
深度学习模块:通信连接所述图像扩增模块、图像处理模块,用于将得到的扩增图片输入到已完成金相图片识别训练的深度学习模型中预测运算,得到预测金相图片,并识别预测金相图片中的氧化膜区域,计算氧化膜厚度,并用于将得到的预测金相图片对应到图像处理模块得到的输出图像;
[0050]
图像输出模块,通信连接所述图像处理模块、深度学习模块,用于输出图像以及各相面积值、面积占比值、氧化膜厚度。
[0051]
本发明的第三个目的是提供一种计算机可读存储介质,所述存储介质上存储有锆合金的高温氧化显微组织图片识别程序指令,所述程序指令可被一个或多个处理器执行,以实现以上所述的一种锆合金高温氧化显微组织图片识别方法的步骤。
[0052]
本发明与现有技术相比,具有如下的优点和有益效果:
[0053]
(1)本发明提供的一种锆合金高温氧化显微组织图片识别方法及系统和计算机可读存储介质,将图像处理技术与深度学习模型相结合,图像处理技术与深度学习技术并行,可以提高图片识别的准确性,使得输出结果更加准确,并具有良好的再现性,为以锆合金作为燃料元件包壳设计以及反应堆在假想lcoa下的安全评价提供准确的指导和参考依据。且将锆合金高温氧化显微组织图片输入到锆合金高温氧化显微组织图片识别系统,即可快速并迅速地获得输出图片结果;同时经过预先进行金相图片识别训练,可迅速区分各相并计算得到各相的面积以及面积占比,大大降低研究人员的工作量,缩短工作时间。
[0054]
(2)本发明提供的一种锆合金高温氧化显微组织图片识别方法,在深度学习过程中引入分割损失函数lb,可以在深度学习模型中预测待识别的金相图片分割的金相边界与识别训练的金相图片分割的金相边界的重合程度,预测得到的预测金相图片与输出的结果的一致性,解决传统的分水岭分割中的“过分割”现象,提高图片分割精度,进而使输出的预测金相图片更加准确。并通过迭代更新卷积神经网络参数,识别的氧化膜的区域以及计算的膜厚结果也更加准确。
附图说明
[0055]
为了更清楚地说明本发明示例性实施方式的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。在附图中:
[0056]
图1为本发明实施例提供的一种锆合金高温氧化显微组织图片识别方法的流程示意图;
[0057]
图2为本发明实施例提供的一种锆合金高温氧化显微组织图片识别方法的操作流程图;
[0058]
图3为本发明实施例提供的一种锆合金高温氧化显微组织图片识别系统的结构示意图;
[0059]
图4为本发明实施例1输入识别系统的图;
[0060]
图5为本发明实施例1输入识别系统的图经系统识别输出的结果图;
[0061]
图6为本发明实施例2输入识别系统的图;
[0062]
图7为本发明实施例2输入识别系统的图经系统识别输出的结果图;
[0063]
图8为本发明实施例3输入识别系统的图;
[0064]
图9为本发明实施例3输入识别系统的图经系统识别输出的结果图。
具体实施方式
[0065]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本
发明的限定。
[0066]
在以下描述中,为了提供对本发明的透彻理解阐述了大量特定细节。然而,对于本领域普通技术人员显而易见的是:不必采用这些特定细节来实行本发明。在其他实施例中,为了避免混淆本发明,未具体描述公知的结构、电路、材料或方法。
[0067]
在整个说明书中,对“一个实施例”、“实施例”、“一个示例”或“示例”的提及意味着:结合该实施例或示例描述的特定特征、结构或特性被包含在本发明至少一个实施例中。因此,在整个说明书的各个地方出现的短语“一个实施例”、“实施例”、“一个示例”或“示例”不一定都指同一实施例或示例。此外,可以以任何适当的组合和、或子组合将特定的特征、结构或特性组合在一个或多个实施例或示例中。此外,本领域普通技术人员应当理解,在此提供的示图都是为了说明的目的,并且示图不一定是按比例绘制的。这里使用的术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。
[0068]
在本发明的描述中,术语“前”、“后”、“左”、“右”、“上”、“下”、“竖直”、“水平”、“高”、“低”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
[0069]
实施例
[0070]
一种锆合金高温氧化显微组织图片识别方法,包括
[0071]
s101:获取待识别的金相图片;
[0072]
s102:对获得的金相图片依次进行灰度化处理、非局部均值去噪、自适应阈值分割,得到二值图像;
[0073]
s103:对二值图像进行形态学建模、连通域分析去噪;
[0074]
s104:将经过连通域分析去噪的图像通过分水岭算法进行α相、β相、氧化膜区域分割;
[0075]
s105:寻找分割后得到的二值图像的闭合轮廓,颜色区分各个闭合轮廓为α相、β相、氧化膜区域、比例尺,形成输出图像,并计算各α相、β相的面积及α相、β相的面积占比;
[0076]
s201:将待识别的金相图片扩增后输入到预先完成金相图片识别训练的深度学习模型中预测运算,得到预测的金相图片,并识别预测金相图片的氧化膜区域,计算氧化膜厚度;
[0077]
s202:将得到的预测金相图片对应到s105中的输出图像;
[0078]
s301:输出图像、α相与β相的面积值及面积占比值、氧化膜的厚度。
[0079]
具体地,
[0080]
s101:获取待识别的金相图片:制备样品,将样品待分析面朝向显微镜物镜放置的载物台上,采集并保存清晰的样品待分析面的金相照片m张;
[0081]
s 102:
[0082]
(1)灰度化处理:将待识别的金相图片m张按如下公式(一)进行灰度化处理。
[0083]
gray(i,j)=0.299*r(i,j) 0.578*g(i,j) 0.114*b(i,j)
[0084]
其中gray代表灰度图,(i,j)代表各金相图片的坐标,gray(i,j)代表坐标为(i,j)的金相图片的灰度值;r(i,j)代表为金相图片的红通道,g(i,j)代表金相图片的绿通道,b(i,j)代表金相图片的蓝通道。
[0085]
(2)非局部均值去噪:利用非局部均值去噪方法,在去噪的同时能最大程度地保持金相图片的细节特征。
[0086]
具体地非局部均值去噪采用下面的公式(二)进行:
[0087][0088]
其中,nl代表去噪后的金相图像,v(j)代表在搜索窗口的像素点,w(i,j)代表权重,由两点之间的高斯距离决定。具体地可采用本领域现有技术进行,在此不进行赘述。
[0089]
(3)自适应阈值分割:对经非局部均值去噪的金相图片进行自适应阈值分割,得到二值图像。具体地自适应阈值分割方法可采用本领域现有技术,在此不进行赘述。
[0090]
s103:
[0091]
(1)形态学建模:将二值图像通过形态学开运行算、闭预算、膨胀、腐蚀操作,去掉小孔和粘连现象,
[0092]
(2)连通域分析去噪:进行形态学建模后,采用连通分析去噪,进行连通域分析后,计算出每个噪点轮廓的面积,去除面积小于50px的噪点。具体的过程可采用现有技术进行,在此不进行赘述。
[0093]
s104:将去噪后的图像通过分水岭算法进行α相、β相、氧化膜区域分割,得到α相、β相、氧化膜区域分割结果。分水岭算法属于现有技术,在此不进行赘述。
[0094]
s105:寻找分割后得到的二值图像的闭合轮廓,颜色区分各个闭合轮廓为α相、β相、氧化膜区域、比例尺,形成输出图像,并计算各α相、β相的面积及α相、β相的面积占比。
[0095]
具体为:
[0096]
寻找分割后得到的二值图像的闭合轮廓,对于寻找到的每个闭合轮廓内的像素点计数;计算每个闭合轮廓同轴度,为了计算每一个闭合轮廓的同轴度z,找到每一个闭合轮廓的最小外接矩形,获取该矩形的宽度值w、高度值h,则
[0097]
将同轴度与设定的阈值th进行对比,将同轴度小于设定阈值th的闭合轮廓标记为α相,同轴度大于或等于设定阈值th的闭合轮廓标记为β相。将同属于α相的各个闭合轮廓的像素点数量相加即得到α相的面积,记为s
α
;将同属于β相的各个闭合轮廓的像素点数量相加即得到β相的面积,s
β
。并根据α、β相的面积,计算各相占比α/(α β)=s
β
/(s
α
s
β
)、β/(α β)=s
α
/(s
α
s
β
)。
[0098]
同时将所有的属于α相的闭合轮廓进行颜色标记,填充为color3,将所有的属于β相的闭合轮廓进行颜色标记,填充为color4。color3和color4具体的选择根据需要选择即可。
[0099]
对于氧化膜、比例尺区域,采用相同的方法填充颜色。
[0100]
进行颜色区分标记后的图片即为输出图像。
[0101]
s201:将待识别的金相图片扩增后输入到预先完成金相图片识别训练的深度学习模型中预测运算,得到预测的金相图片,并识别预测金相图片的氧化膜区域,计算氧化膜厚度。
[0102]
(1)图像扩增:将已采集的待识别金相照片(包含氧化膜、α相、β相)通过镜像变化、旋转、缩放、随机裁剪、平移变换、高斯噪声扰动,增广至m
×
n张,并可将这m
×
n张图片统一
分辨率大小,可以统一成分辨率为1024*1024大小。
[0103]
(2)深度学习:
[0104]
(a)获取预测金相图片,包括:
[0105]
将经扩增得到的m
×
n张图片输入到在深度学习模型的imagenet数据集上预先训练好的resnet101网络中,提取各金相图片的特征向量;深度学习模型可以采用cnn架构的卷积神经网络模型;
[0106]
将提取的各金相图片的特征向量输入至三层金字塔结构(以3
×
33
×
3,5
×
55
×
5,7
×
77
×
7三个卷积做金字塔结构为例)的特征注意力模块fpa((feature pyramid attention module)中,获得不同尺寸下的金相图片的特征信息,将这些特征信息与经1
×
1卷积处理后的原始特征向量融合,记为向量a1;
[0107]
将resnet101网络上的boock上的三个不同阶段的特征向量通过全局注意力上采样模块gau(global attention upsample)处理,得到b1、b2、b3向量;
[0108]
将b1、b2、b3向量分别与向量a1先乘后加运算,再进行上采样处理,得到预测的金相图片。
[0109]
(b)识别预测金相图片的氧化膜区域:
[0110]
定义卷积神经网络参数θ={θ1,θ2,θ3…
θn};
[0111]
在进行识别训练过程中,利用以下迭代公式实时更新上述的卷积神经网络参数:
[0112][0113]
其中θj代表θj:的迭代,代表一阶导数,lb代表分割损失函数;
[0114]
将经过迭代的、训练好的卷积神经网络参数用于卷积神经网络最后一层的softmax概率预测,此概率预测是预测得到的预测金相图片中各像素点的分类,softmax概率预测值小于1,具体公式为:
[0115][0116]
其中xi代表预测的预测金相图片各像素点x属于i类的值(卷积神经网络最后一层的值),各个预测金相图片的所有像素点分类的softmax概率预测值之和为1,softmax概率预测值最大的区域即为氧化膜区域。
[0117]
由于传统的分水岭算法最大的制约点就是“过分割”,比如一个大晶粒被过度分割为很多小晶粒,在分割过程中会出现划痕,而这些划痕以及图片中的腐蚀坑也会成为分割线的连接点,就会导致图像分割精度降低。
[0118]
本发明实施例在进行锆合金的金相图片的识别训练过程中,引入了分割损失函数lb,用来预测输入到深度学习模型中的待识别的金相图片分割的金相边界与识别训练的金相图片分割的金相边界的重合程度,其中分割的金相边界包括α相边界、β相边界、氧化膜区域边界;lb越小代表重合程度越高,当lb足够小时,表明输入深度学习模型的神经网络训练的金相图片能够产生与正确的识别结果越一致的结果,即预测金相图片。
[0119]
分割损失函数lb具体的计算过程为:
[0120]
定义金相边界分割过程中的精确率(precision)
[0121]
召回率(recall)
[0122]
其中b(x)=x-minpool(x);
[0123]
代表金相图片的真实标签,y
pr
代表分割得到的金相图片的预测值,minpool表示最小池化,b(x)代表一种操作,代表金相图片各相的真实边界,代表金相图片各相的预测边界,sum代表求运算的矩阵和;
[0124]
根据所述精确率p和召回率r计算分割边界的调和平均分数得金相图片的边界损失函数将边界损失函数与交叉熵函数lc进行加法运算,即得分割损失函数lb,其中:
[0125]
调和平均分数
[0126]
边界损失函数
[0127]
分割损失函数ωb,ωc分别代表边界损失函数和交叉熵函数lc的超参数。本发明实施例中ωb为0.5,所述ωc为1.0。
[0128]
其中,调和平均分数
[0129]
最大为1,最小为0,当预测边界和真实边界完全重合时,调和平均分数为1。
[0130]
通过引入分割损失函数lb,可以在识别训练过程中迭代更新卷积神经网络参数,从而预测输入的金相图片与预测金相图片之间的重合程度,避免过分割现象,提高图片分割精度,进而使输出的预测金相图片更加准确,识别的氧化膜的区域以及计算的膜厚结果也更加准确。
[0131]
在识别氧化膜的过程中,需要指出的是,由于有些金相图片中并没有氧化膜,因此在这种情况下是识别不到氧化膜的,此时softmax对应氧化膜的概率预测值接近于0。
[0132]
(c)计算识别的氧化膜厚度
[0133]
将识别到的氧化膜区域内的像素点全部提取,并定义氧化膜像素点集合为{(x1,y1),(x2,y2),
…
(xn,yn)},使用n根线与像素点集合相交,计算与各根线相交的像素点数量之和n,氧化膜厚度
[0134]
其中,所述氧化膜像素点集合中的(xn,yn)代表预测金相图片中各个像素点的坐标,各根线为沿空间坐标轴x平行的线,各根线的坐标方程集合为{x=x1,x=x2,
…
x=xn}。
[0135]
实施例1:
[0136]
(1)样品制备、待识别图片获取:分别从锆合金板材上线切割成10mm
×
10mm
×
1.8mm的试样,在水蒸汽氧化气氛下,氧化温度950℃、保温时间3600s下氧化。随后,对氧化后的样品进行编号,镶样,再用1000#的sic水砂纸进行精细研磨,然后再用5%hf 45%hno3 50%h2o的腐蚀液中进行蚀刻,后用清水冲洗干净,烘干后进行金相观察。
[0137]
将样品待分析面朝向显微镜物镜放置的载物台上,采集并保存清晰的样品待分析面的金相照片。
[0138]
(2)图像扩增;
[0139]
(3)深度学习:
[0140]
将扩增得到的待识别的金相图片输入到深度学习模型中进行预测运算,获得预测金相图片;
[0141]
识别氧化膜:
[0142]
定义卷积神经网络参数θ={θ1,θ2,θ3…
θn},在训练过程中,通过迭代公式更新卷积神经网络参数:
[0143]
然后根据卷积神经网络参数对卷积神经网络的最后一层进行softmax概率预测,结果显示softmax概率预测值接近0,表明金相图片中不含有氧化膜。
[0144]
将得到的预测金相图片对应到步骤(4)中的f得到的输出图像,输出图像、α相与β相的面积值及面积占比值、氧化膜的厚度。
[0145]
(4)识别α相、β相、比例尺
[0146]
彩色图片有三个通道,分别为r(红色)、g(绿色)、b(蓝色),记为x[3][h][w]。
[0147]
a、首先依据公式(一)对输入的图片灰度化处理,得到gray[h][w]。
[0148]
b、依据公式(二)去噪得到nl[h][w]。
[0149]
c、自适应阈值分割初步得到二值图像e[h][w]。
[0150]
d、对二值图像e[h][w]进行形态学建模、去噪。其中各相的面积为像素数量之和,下同。
[0151]
e、将经去噪的图像运用分水岭算法进行α相、β相、氧化膜区域分割,得到分割结果。
[0152]
f、使用步骤e中得到的轮廓,从中找到闭合轮廓,颜色区分各个闭合轮廓为α相、β相、氧化膜区域、比例尺,形成输出图像。并对各个闭合轮廓计算同轴度z,我们找到每一个闭合轮廓的最小外接矩形,宽度为w,高度为h。
[0153][0154]
将z《threshold的闭合轮廓标记为α相,反之记为β相。分别将他们的像素点数量相加,分别记为s
α
和s
β
。其中threshold设置为2。
[0155]
计算α相、β相分别占的面积比,并形成输出图像。
[0156]
其中步骤(3)深度学习与步骤(4)识别α相、β相、比例尺是同步进行的。
[0157]
图4、5分别为实施例1输入图片识别系统的图片与从图片识别系统输出的图片结果。
[0158]
表1为实施例1输出的结果:
[0159]
表1
[0160]
氧化膜厚度α面积β面积α/(α β)β/(α β)0461912.0109613.00.808209614627530.19179038537247
[0161]
实施例2
[0162]
(1)样品制备、待识别图片获取:
[0163]
分别从锆合金板材上线切割成10mm
×
10mm
×
1.8mm的试样,在水蒸汽氧化气氛下,氧化温度1200℃、保温时间60s氧化。随后,对氧化后样品进行编号,镶样,再用1000#sic水砂纸进行精细研磨,然后再用5%hf 45%hno3 50%h2o腐蚀液中进行蚀刻,后用清水冲洗干净,烘干后进行金相观察。
[0164]
将样品待分析面朝向显微镜物镜放置的载物台上,采集并保存清晰的样品待分析面的金相照片。
[0165]
其余过程同实施例1。
[0166]
图6、图7分别为实施例2输入图片识别系统的图与从图片识别系统输出的图片。
[0167]
表2为实施例2输出的结果:
[0168]
表2
[0169]
氧化膜厚度α面积β面积α/(α β)β/(α β)0524624.0109077.00.172126917899770.82787308210023
[0170]
实施例3
[0171]
(1)样品制备、待识别图片获取:
[0172]
分别从锆合金板材上线切割成10mm
×
10mm
×
1.8mm的试样,在干燥空气氧化气氛下,氧化温度1200℃、保温时间60s氧化。随后,对氧化后样品进行编号,镶样,再用1000#sic水砂纸进行精细研磨,然后再5%hf 45%hno3 50%h2o腐蚀液中进行蚀刻,后用清水冲洗干净,烘干后进行金相观察。
[0173]
将样品待分析面朝向显微镜物镜放置的载物台上,采集并保存清晰的样品待分析面的金相照片。
[0174]
然后计算氧化膜的厚度:
[0175]
将识别到的氧化膜区域内的像素点全部提取,并定义氧化膜像素点集合为{(x1,y1),(x2,y2),
…
(xn,yn)},使用10根线与像素点集合相交,计算与各根线相交的像素点数量之和n,氧化膜厚度
[0176]
其中,所述氧化膜像素点集合中的(xn,yn)代表预测金相图片中各个像素点的坐标,各根线为沿空间坐标轴x平行的线,各根线的坐标方程集合为{x=x1,x=x2,
…
x=x
10
}。
[0177]
其余过程同实施例1。
[0178]
图8、图9分别为实施例3输入图片识别系统的图与从图片识别系统输出的图片。
[0179]
表3为实施例3输出的结果:
[0180]
表3
[0181]
氧化膜厚度α面积β面积α/(α β)β/(α β)74.8μm255578.0184769.50.58040070626040.4195992937396
[0182]
实施例4
[0183]
一种锆合金高温氧化显微组织图片识别系统,包括:
[0184]
图片获取模块,用于获取待识别的金相图片;
[0185]
图片处理模块,通信连接图片获取模块,用于对待识别的金相图片进行灰度化处理、非局部均值去噪、自适应阈值分割,以得到二值图像,同时通过形态学建模、连通域分析去噪对二值图像进行降噪处理,对降噪处理的二值图像采用分水岭算法进行相分割,对分
割后的二值图像的闭合轮廓进行颜色标注,形成输出图像,并对各闭合轮廓内的像素点计数得到α相或β相的面积、α相、β相的面积占比;
[0186]
图像扩增模块,通信连接图片获取模块,用于将获取的待识别的金相图片进行扩增;
[0187]
深度学习模块:通信连接图像扩增模块、图像处理模块,用于将得到的扩增图片输入到已完成金相图片识别训练的深度学习模型中预测运算,得到预测金相图片,并识别预测金相图片中的氧化膜区域,计算氧化膜厚度,并用于将得到的预测金相图片对应到图像处理模块得到的输出图像;
[0188]
图像输出模块,通信连接图像处理模块、深度学习模块,用于输出图像以及各相面积值、面积占比值、氧化膜厚度。
[0189]
实施例5
[0190]
本实施例提供了一种计算机可读存储介质,存储介质上存储有锆合金的高温氧化显微组织图片识别程序指令,程序指令可被一个或多个处理器执行,以实现如实施例1~3任一个的锆合金高温氧化显微组织图片识别方法的步骤。
[0191]
本发明中未涉及的方法、过程、设备等均为已知技术,在此不进行赘述。
[0192]
本领域普通技术人员可以理解实现上述事实和方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,涉及的程序或者所述的程序可以存储于一计算机所可读取存储介质中,该程序在执行时,包括如下步骤:此时引出相应的方法步骤,所述的存储介质可以是rom/ram、磁碟、光盘等等。
[0193]
以上的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。