技术特征:
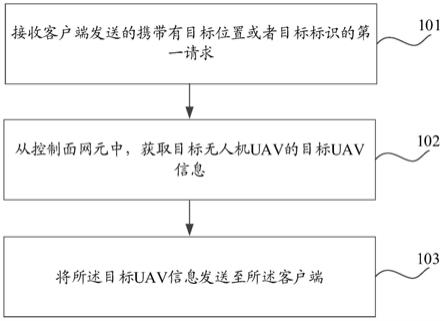
1.一种无人机信息处理方法,应用于无人机飞行使能子系统ufes,其特征在于,所述方法包括:接收客户端发送的携带有目标位置或者目标标识的第一请求;从控制面网元中,获取目标无人机uav的目标uav信息;其中,目标uav为与所述目标位置接近的uav或包括所述目标标识的uav或包括所述目标标识的uav;所述控制面网元包括:所述ufes、统一数据管理udm网元、网络功能开放nef网元以及与接入和移动性管理功能amf网元中的至少一种;将所述目标uav信息发送至所述客户端。2.根据权利要求1所述的无人机信息处理方法,其特征在于,所述目标uav为与所述目标位置接近的uav,包括:所述目标uav为与所述目标位置距离最小的uav,或所述目标uav为与所述目标位置距离在第一预设距离范围内的uav。3.根据权利要求2所述的无人机信息处理方法,其特征在于,所述uav信息包括uav标识、飞行路径信息以及跟踪信息中的至少一种;所述从控制面网元中,获取目标无人机uav的目标uav信息,包括:从控制面网元中,获取uav的uav标识以及跟踪信息;根据所述uav标识对所述uav进行定位,确定位置与所述目标位置距离最小的目标uav或与所述目标位置距离在第一预设距离范围内的目标uav,并确定所述目标uav的目标uav信息;或从控制面网元中,获取与所述目标位置距离最小的目标uav或与所述目标位置距离在第一预设距离范围内的目标uav的目标uav标识;根据所述目标uav标识,从所述udm网元中获取所述目标uav的跟踪信息。4.根据权利要求3所述的无人机信息处理方法,其特征在于,所述从控制面网元中,获取uav的uav标识以及跟踪信息,包括:若所述控制面网元包括所述udm网元,从所述udm网元中,获取uav标识以及uav的跟踪信息。5.根据权利要求3所述的无人机信息处理方法,其特征在于,若所述控制面网元包括所述ufes或所述nef网元,所述从控制面网元中,获取uav的uav标识以及跟踪信息之前,所述方法包括:从所述udm网元或所述nef网元中,获取uav的uav信息;所述从控制面网元中,获取uav的uav标识以及跟踪信息,包括:根据所述uav信息,确定跟踪信息包括所述目标位置的uav,获取所述uav的uav信息。6.根据权利要求3所述的无人机信息处理方法,其特征在于,若所述控制面网元包括所述amf网元以及所述udm网元,所述从控制面网元中,获取uav的uav标识以及跟踪信息,包括:确定服务区域包括所述目标位置的amf网元;通过所述amf网元,确定无人机uav的uav标识;根据所述uav标识,从所述udm网元中获取所述uav的跟踪信息。
7.根据权利要求6所述的无人机信息处理方法,其特征在于,所述通过所述amf网元,确定无人机uav的uav标识,包括:向网络存储功能nrf网元发送携带有所述目标位置的发现服务请求消息;接收所述nrf网元发送的发现服务响应消息,获取所述发现服务响应消息中携带的第一响应信息;所述第一响应信息包括:amf网元的amf标识,或所述amf标识以及与所述目标位置对应的小区标识;根据所述amf标识,向所述amf网元发送携带有所述目标位置的第一服务请求;接收所述amf网元发送的携带有第二响应信息的第一请求回复;所述第二响应信息包括uav标识或与所述目标位置对应的终端标识;根据所述第二响应信息,确定无人机uav的uav信息。8.根据权利要求7所述的无人机信息处理方法,其特征在于,若所述第二响应信息包括所述uav信息,所述uav信息为所述amf网元根据所述目标位置确定的,或根据所述小区标识确定的。9.根据权利要求7所述的无人机信息处理方法,其特征在于,若所述第二响应信息包括所述终端标识,所述根据所述第二响应信息,确定无人机uav的uav信息,包括:根据预设对应关系,确定与所述终端标识对应的无人机uav,以及所述uav的uav信息。10.根据权利要求3所述的无人机信息处理方法,其特征在于,若所述控制面网元包括所述amf网元,所述从控制面网元中,获取与所述目标位置距离最小的目标uav,包括:向网络存储功能nrf网元发送携带有所述目标位置的发现服务请求消息;接收所述nrf网元发送的发现服务响应消息,获取所述发现服务响应消息中携带的amf标识;根据所述amf标识,向所述amf网元的发送携带有所述目标位置的uav请求;接收所述amf网元发送的携带有目标uav标识的uav响应;所述目标uav标识为所述amf网元根据所述目标位置确定的。11.根据权利要求1所述的无人机信息处理方法,其特征在于,所述从控制面网元中,获取目标无人机uav的目标uav信息,包括:向所述uav发送第一跟踪信息获取请求,并接收所述uav反馈的跟踪信息或者飞行路径信息;和/或向amf网元发送第二跟踪信息获取请求,并接收所述amf网元反馈的uav追的跟踪信息;其中,所述跟踪信息为所述amf网元根据所述第二跟踪信息获取请求,触发无线接入网ran向ue发送第一飞行路线请求,并接收所述ue反馈的跟踪信息;或所述跟踪信息为所述amf网元根据所述第二跟踪信息获取请求,向uav发送第二飞行路线请求,并接收所述uav反馈的跟踪信息。12.一种无人机信息处理方法,应用于接入和移动性管理功能amf网元,其特征在于,所述方法包括:接收无人机飞行使能子系统ufes发送的无人机uav请求,获取所述uav请求中携带的目标位置;确定与所述目标位置对应目标小区,并确定所述目标小区内的目标uav;
向所述ufes发送所述目标uav的标识信息;所述标识信息包括uav标识以及所述目标uav的终端标识中的至少一种。13.根据权利要求12所述的无人机信息处理方法,其特征在于,所述方法还包括:接收所述ufes发送的第二跟踪信息获取请求;向uav发送飞行路线请求,并接收所述uav根据所述飞行路线请求反馈的跟踪信息或者飞行路线信息;向所述ufes反馈所述跟踪信息或者飞行路线信息。14.根据权利要求13所述的无人机信息处理方法,其特征在于,所述向uav发送飞行路线请求,并接收所述uav根据所述飞行路线请求反馈的跟踪信息,包括:触发无线接入网ran向ue发送第一飞行路线请求,并接收所述ue反馈的跟踪信息;或向uav发送第二飞行路线请求,并接收所述uav反馈的跟踪信息。15.一种终端,其特征在于,包括存储器,收发机,处理器:存储器,用于存储计算机程序;收发机,用于在所述处理器的控制下收发数据;处理器,用于读取所述存储器中的计算机程序并执行以下操作:接收客户端发送的携带有目标位置或者目标标识的第一请求;从控制面网元中,获取目标无人机uav的目标uav信息;其中,目标uav为与所述目标位置接近的uav或包括所述目标标识的uav或包括所述目标标识的uav;所述控制面网元包括:人机飞行使能子系统ufes、统一数据管理udm网元、网络功能开放nef网元以及与接入和移动性管理功能amf网元中的至少一种;将所述目标uav信息发送至所述客户端。16.根据权利要求15所述的终端,其特征在于,所述目标uav为与所述目标位置接近的uav,包括:所述目标uav为与所述目标位置距离最小的uav,或所述目标uav为与所述目标位置距离在第一预设距离范围内的uav。17.根据权利要求16所述的终端,其特征在于,所述uav信息包括uav标识、飞行路径信息以及跟踪信息中的至少一种;所述从控制面网元中,获取目标无人机uav的目标uav信息,包括:从控制面网元中,获取uav的uav标识以及跟踪信息;根据所述uav标识对所述uav进行定位,确定位置与所述目标位置距离最小的目标uav或与所述目标位置距离在第一预设距离范围内的目标uav,并确定所述目标uav的目标uav信息;或从控制面网元中,获取与所述目标位置距离最小的目标uav或与所述目标位置距离在第一预设距离范围内的目标uav的目标uav标识;根据所述目标uav标识,从所述udm网元中获取所述目标uav的跟踪信息。18.根据权利要求17所述的终端,其特征在于,所述从控制面网元中,获取uav的uav标识以及跟踪信息,包括:若所述控制面网元包括所述udm网元,从所述udm网元中,获取uav标识以及uav的跟踪信息。
19.根据权利要求17所述的终端,其特征在于,若所述控制面网元包括所述ufes或所述nef网元,所述从控制面网元中,获取uav的uav标识以及跟踪信息之前,所述终端包括:从所述udm网元或所述nef网元中,获取uav的uav信息;所述从控制面网元中,获取uav的uav标识以及跟踪信息,包括:根据所述uav信息,确定跟踪信息包括所述目标位置的uav,获取所述uav的uav信息。20.根据权利要求17所述的终端,其特征在于,若所述控制面网元包括所述amf网元以及所述udm网元,所述从控制面网元中,获取uav的uav标识以及跟踪信息,包括:确定服务区域包括所述目标位置的amf网元;通过所述amf网元,确定无人机uav的uav标识;根据所述uav标识,从所述udm网元中获取所述uav的跟踪信息。21.根据权利要求20所述的终端,其特征在于,所述通过所述amf网元,确定无人机uav的uav标识,包括:向网络存储功能nrf网元发送携带有所述目标位置的发现服务请求消息;接收所述nrf网元发送的发现服务响应消息,获取所述发现服务响应消息中携带的第一响应信息;所述第一响应信息包括:amf网元的amf标识,或所述amf标识以及与所述目标位置对应的小区标识;根据所述amf标识,向所述amf网元发送携带有所述目标位置的第一服务请求;接收所述amf网元发送的携带有第二响应信息的第一请求回复;所述第二响应信息包括uav标识或与所述目标位置对应的终端标识;根据所述第二响应信息,确定无人机uav的uav信息。22.根据权利要求21所述的终端,其特征在于,若所述第二响应信息包括所述uav信息,所述uav信息为所述amf网元根据所述目标位置确定的,或根据所述小区标识确定的。23.根据权利要求21所述的终端,其特征在于,若所述第二响应信息包括所述终端标识,所述根据所述第二响应信息,确定无人机uav的uav信息,包括:根据预设对应关系,确定与所述终端标识对应的无人机uav,以及所述uav的uav信息。24.根据权利要求17所述的终端,其特征在于,若所述控制面网元包括所述amf网元,所述从控制面网元中,获取与所述目标位置距离最小的目标uav,包括:向网络存储功能nrf网元发送携带有所述目标位置的发现服务请求消息;接收所述nrf网元发送的发现服务响应消息,获取所述发现服务响应消息中携带的amf标识;根据所述amf标识,向所述amf网元的发送携带有所述目标位置的uav请求;接收所述amf网元发送的携带有目标uav标识的uav响应;所述目标uav标识为所述amf网元根据所述目标位置确定的。25.根据权利要求15所述的终端,其特征在于,所述从控制面网元中,获取目标无人机uav的目标uav信息,包括:向所述uav发送第一跟踪信息获取请求,并接收所述uav反馈的跟踪信息或者飞行路径信息;和/或向amf网元发送第二跟踪信息获取请求,并接收所述amf网元反馈的uav追的跟踪信息;
其中,所述跟踪信息为所述amf网元根据所述第二跟踪信息获取请求,触发无线接入网ran向ue发送第一飞行路线请求,并接收所述ue反馈的跟踪信息;或所述跟踪信息为所述amf网元根据所述第二跟踪信息获取请求,向uav发送第二飞行路线请求,并接收所述uav反馈的跟踪信息。26.一种终端,其特征在于,包括存储器,收发机,处理器:存储器,用于存储计算机程序;收发机,用于在所述处理器的控制下收发数据;处理器,用于读取所述存储器中的计算机程序并执行以下操作:接收无人机飞行使能子系统ufes发送的无人机uav请求,获取所述uav请求中携带的目标位置;确定与所述目标位置对应目标小区,并确定所述目标小区内的目标uav;向所述ufes发送所述目标uav的标识信息;所述标识信息包括uav标识以及所述目标uav的终端标识中的至少一种。27.根据权利要求26所述的终端,其特征在于,所述终端还包括:接收所述ufes发送的第二跟踪信息获取请求;向uav发送飞行路线请求,并接收所述uav根据所述飞行路线请求反馈的跟踪信息或者飞行路线信息;向所述ufes反馈所述跟踪信息或者飞行路线信息。28.根据权利要求27所述的终端,其特征在于,所述向uav发送飞行路线请求,并接收所述uav根据所述飞行路线请求反馈的跟踪信息,包括:触发无线接入网ran向ue发送第一飞行路线请求,并接收所述ue反馈的跟踪信息;或向uav发送第二飞行路线请求,并接收所述uav反馈的跟踪信息。29.一种无人机信息处理装置,应用于无人机飞行使能子系统ufes,其特征在于,所述装置包括:请求接收模块,用于接收客户端发送的携带有目标位置或者目标标识的第一请求;信息获取模块,用于从控制面网元中,获取目标无人机uav的目标uav信息;其中,目标uav为与所述目标位置接近的uav或包括所述目标标识的uav或包括所述目标标识的uav;所述控制面网元包括:所述ufes、统一数据管理udm网元、网络功能开放nef网元以及与接入和移动性管理功能amf网元中的至少一种;信息发送模块,用于将所述目标uav信息发送至所述客户端。30.一种无人机信息处理装置,应用于接入和移动性管理功能amf网元,其特征在于,所述装置包括:位置获取模块,用于接收无人机飞行使能子系统ufes发送的无人机uav请求,获取所述uav请求中携带的目标位置;目标确定模块,用于确定与所述目标位置对应目标小区,并确定所述目标小区内的目标uav;标识发送模块,用于向所述ufes发送所述目标uav的标识信息;所述标识信息包括uav标识以及所述目标uav的终端标识中的至少一种。31.一种处理器可读存储介质,其特征在于,所述处理器可读存储介质存储有计算机程序,所述计算机程序用于使所述处理器执行权利要求1至14中任一项所述的方法。
技术总结
本申请实施例提供了一种无人机信息处理方法及装置、终端。所述方法包括:接收客户端发送的携带有目标位置或者目标标识的第一请求;从控制面网元中,获取目标无人机UAV的目标UAV信息;其中,目标UAV为与所述目标位置接近的UAV或包括所述目标标识的UAV或包括所述目标标识的UAV;所述控制面网元包括:所述UFES、统一数据管理UDM网元、网络功能开放NEF网元以及与接入和移动性管理功能AMF网元中的至少一种;将所述目标UAV信息发送至所述客户端。本申请实施例解决了现有技术中,难以实现对未知具体信息的UAV进行定位的问题。体信息的UAV进行定位的问题。体信息的UAV进行定位的问题。
技术研发人员:侯云静
受保护的技术使用者:大唐移动通信设备有限公司
技术研发日:2020.08.13
技术公布日:2022/3/3
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。