1.本实用新型属于无人机控制技术领域,更具体地涉及一种着陆速度跟踪控制系统。
背景技术:
2.滑跑型无人机的着陆控制是整个飞行控制的难点。在着陆时,要求着陆过程平缓,实现对接地速度、下沉速度、姿态、航迹、航向等的精确控制。对于从起飞到着陆的整个过程重量变化不大的无人机,在着陆时按照固定的重量设计着陆速度跟踪控制律,可以满足着陆要求。但对于装载重量大长航时察打型无人机,不仅有机身油箱,还携带机翼副油箱及导弹等攻击武器。从起飞到执行任务结束,其重量变化很大,如果按照常规的设计方法设计着陆速度跟踪控制律则会导致无人机的重量变化大时的接地速度、下沉速度过大,使无人机起落架在着陆时受到严重损伤。因此迫切需要发明一种适应重量变化大的无人机着陆速度跟踪控制方法,使其着陆速度等指标满足着陆要求。
技术实现要素:
3.要解决的技术问题
4.为了避免现有技术的不足之处,本实用新型提出一种着陆速度跟踪控制系统。
5.技术方案
6.一种着陆速度跟踪控制系统,其特征在于包括空速传感器、油量传感器、发动机风门伺服系统和机载计算机;空速传感器测量无人机的飞行空速;油量传感器测量剩余油量;风门舵机用于执行舵面偏转指令;机载计算机采集各传感器的测量信息,将传感器测量信息带入控制律解算出舵面的舵偏角度,控制风门舵机伺服系统驱动舵面偏转。
7.所述的空速传感器安装机翼上。
8.所述的空速传感器的型号为ipt0020a33r。
9.所述的油量传感器安装机箱上。
10.所述的油量传感器的型号为305-df。
11.一种无人机,其特征在于包含上述的着陆速度跟踪控制系统。
12.有益效果
13.本实用新型提出的一种着陆速度跟踪控制系统,首先各个传感器去采集无人机的各项测量信息,然后机载计算机根据各个测量信息解算出风门舵面的舵偏角度,控制风门舵机伺服系统驱动舵面偏转。本系统能够使无人机实现定速下滑,使着陆姿态、速度等指标满足着陆要求。
附图说明
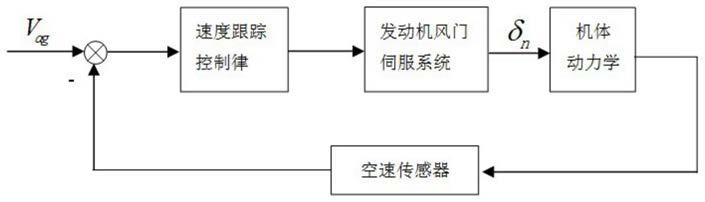
14.图1本实用新型的着陆速度跟踪控制系统
具体实施方式
15.现结合实施例、附图对本实用新型作进一步描述:
16.图1给出了着陆速度跟踪控制系统,该控制系统包括的部件有:空速传感器、油量传感器、风门伺服系统、机载计算机(图中控制律框中)。空速传感器用于测量无人机的飞行空速;油量传感器测量无人机的油量;风门舵机用于执行舵面偏转指令,机载计算机用于采集各个传感器的测量信息,将传感器测量信息带入控制律解算出风门舵面的舵偏角度,控制舵机伺服系统驱动舵面偏转。在着陆速度跟踪控制系统中,机载计算机中运行控制律程序,将采集空速传感器测量的无人机空速、油量传感器测量的油量信息,将空速、油量等信息带入着陆速度跟踪控制律,解算出速度通道的风门舵面偏转角度,当无人机的空速和给定的空速指令值存在偏差时,操纵风门伺服机构偏转舵面,改变无人机的空速,跟踪给定空速指令值。
技术特征:
1.一种着陆速度跟踪控制系统,其特征在于包括空速传感器、油量传感器、发动机风门伺服系统和机载计算机;空速传感器测量无人机的飞行空速;油量传感器测量剩余油量;风门舵机用于执行舵面偏转指令;机载计算机采集各传感器的测量信息,将传感器测量信息带入控制律解算出舵面的舵偏角度,控制风门舵机伺服系统驱动舵面偏转。2.根据权利要求1所述的一种着陆速度跟踪控制系统,其特征在于空速传感器安装机翼上。3.根据权利要求2所述的一种着陆速度跟踪控制系统,其特征在于空速传感器的型号为ipt0020a33r。4.根据权利要求1所述的一种着陆速度跟踪控制系统,其特征在于油量传感器安装机箱上。5.根据权利要求4所述的一种着陆速度跟踪控制系统,其特征在于油量传感器的型号为305-df。
技术总结
本实用新型涉及一种着陆速度跟踪控制系统,属于无人机控制技术领域。包括空速传感器、油量传感器、发动机风门伺服系统和机载计算机;空速传感器测量无人机的飞行空速;油量传感器测量剩余油量;风门舵机用于执行舵面偏转指令;机载计算机采集各传感器的测量信息,将传感器测量信息带入控制律解算出舵面的舵偏角度,控制风门舵机伺服系统驱动舵面偏转。控制风门舵机伺服系统驱动舵面偏转。控制风门舵机伺服系统驱动舵面偏转。
技术研发人员:贾彩娟 田心宇 侯泊江 高朋飞 荆鹏飞 杨嘉涛
受保护的技术使用者:西北工业大学
技术研发日:2021.06.09
技术公布日:2022/3/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。