1.本技术是涉及一种创新的基于生物特征技术进行认证的方法与系统,特别是涉及一种书写笔以及对所述书写笔所写的签名进行辨识的签名辨识方法及其系统。
背景技术:
2.签名是一种具有悠远历史的身份验证方法。在电子交易兴起之后,业者也尝试以电子设备、行动设备进行签名认证。但在电子设备、行动设备的触控面板上签名,所能提供的特征种类与数量太少,无法执行正确的身份验证。如果要以电子签名提供足够种类与数量的特征,则需要同时侦测多种特征,并取得大量数据。以这种方式进行身份验证,并不符合商业应用的需求。
3.为解决电子签名无法解决的科技难题,业者发展出“空中签名”。通常是由签名者以肢体在空中做出一定的动作,经由计算机视觉捕捉后,抽取特征,进行身份验证。这种技术主要是基于人类肢体具有多个关节,相同的动作由不同人来做,结果会有不同。
4.但是,现有技术都是以肢体运动产生运动轨迹,再对所述轨迹进行辨认,因此,执行时用户需要较大的操作空间,并不便利。
技术实现要素:
5.本技术的目的是提供一种新颖的签名比对技术,以供执行身份验证。
6.本技术的目的也在于提供一种新颖的书写笔,以用来执行签名比对。
7.根据本技术的其中一目的,提供一种新颖的书写笔。所述书写笔包括本体、书写轨迹的诱发器以及空中签名产生器。本体包括书写端与运动感测端,两者以至少90度的角度相隔。诱发器设置于所述书写端,用于在感应表面上产生书写轨迹。空中签名产生器设置于所述运动感测端,并包括运动感测装置、第一通信装置、控制装置以及电源供应器。运动感测装置用于感测所述运动感测端的三维空间运动,并以预定时间而间隔且连续地输出所述三维空间运动中的至少一个维度的读值。第一通信装置用于以无线或有线方式与外部装置建立通信通道。控制装置连接所述运动感测装置及所述第一通信装置,以用来接收所述运动感测装置的感测结果信息,处理所述感测结果信息,并经由第一通信装置传送至外部装置。其中,所述控制装置还配置成:接收到开始侦测指令后记录当下时间为第一时间、以及获取所述运动感测装置的读值、并于接收到停止感测指令后记录当下时间为第二时间,以产生含有所述第一时间、所述运动感测装置的所述读值及所述第二时间的空中签名档,并启动所述第一通信装置而将所述空中签名档传送至所述外部装置。电源供应器连接所述运动感测装置、所述第一通信装置与所述控制装置,以对所述运动感测装置、所述第一通信装置与所述控制装置提供电力。
8.本技术也提供一种创新的签名辨识方法与签名辨识系统。本技术的签名辨识系统包括至少一个具有上述特征的书写笔以及签名辨认装置。所述签名辨认装置包括:签名数据存储装置、第二通信装置以及签名比对装置。签名数据存储装置用于存储多个参考空中
签名档,各所述参考空中签名档对应到签名账户。第二通信装置用于与所述书写笔的所述第一通信装置建立通信通道,以与所述书写笔交换数据。签名比对装置用于将从所述书写笔收到的所述空中签名档与所述签名数据存储装置中的至少一个参考空中签名档作特征比对,并于特征比对结果的近似值高于特定临界值且所述第一时间与所述第二时间与比对时间之差值小于特定值时,判断所述空中签名档与至少一个所述参考空中签名档来自相同提供者。
9.本技术所提供的签名辨识方法包括以下步骤:启动书写笔;其中,所述书写笔包括本体、诱发器以及空中签名产生器。本体包括书写端与运动感测端,所述书写端与所述运动感测端以握持基准点相隔,所述书写端至所述握持基准点的段与所述运动感测端至所述握持基准点的段形成至少90度的角度。诱发器设置于所述书写端。空中签名产生器设置于所述运动感测端,空中签名产生器包括运动感测装置、第一通信装置以及控制装置。运动感测装置用于感测所述运动感测端的三维空间运动,并以预定定时间而间隔且连续地输出所述三维空间运动的至少一个维度的读值。第一通信装置用于以无线或有线方式与外部装置建立通信通道。控制装置用于记录开始操作的第一时间、以及获取所述运动感测装置的所述读值并记录停止操作的第二时间,以产生含有所述第一时间、所述运动感测装置的所述读值及所述第二时间的空中签名档;记录所述空中签名档;将所述空中签名档与存储多个参考签名档的签名数据存储装置中的其中一个所述参考空中签名档作特征比对;以及在所述特征比对结果的近似值高于特定临界值,且所述第一时间、所述第二时间或其组合与比对时间之差值小于特定值时,判断所述空中签名档与所述参考空中签名档来自相同提供者。
10.在本技术的一些优选实施例中,所述签名辨识方法包括以下步骤:启动书写笔,以接收所述书写笔送来的空中签名档;启动书写轨迹产生装置,所述书写轨迹产生装置捕捉所述书写笔的运动轨迹,产生描述所述运动轨迹的平面签名档;所述平面签名档包括所述运动轨迹的起始时间信息与结束时间信息;将所述书写笔送来的所述空中签名档与存储多个参考签名档的签名数据存储装置中的参考空中签名档进行特征比对,且将从所述书写轨迹产生装置收到的平面签名档与所述签名数据存储装置中的至少一个参考平面签名档进行特征比对;在所述空中签名档与所述参考空中签名档的特征比对结果的近似值高于第一临界值且所述平面签名档与所述参考平面签名档的特征比对结果的近似值高于第二临界值时,判断两空中签名档来自相同提供者;以及输出判断结果。
11.为使能更进一步了解本技术的特征及技术内容,请参阅以下有关本技术的详细说明与附图,然而所提供的附图仅用于提供参考与说明,并非用来对本技术加以限制。
附图说明
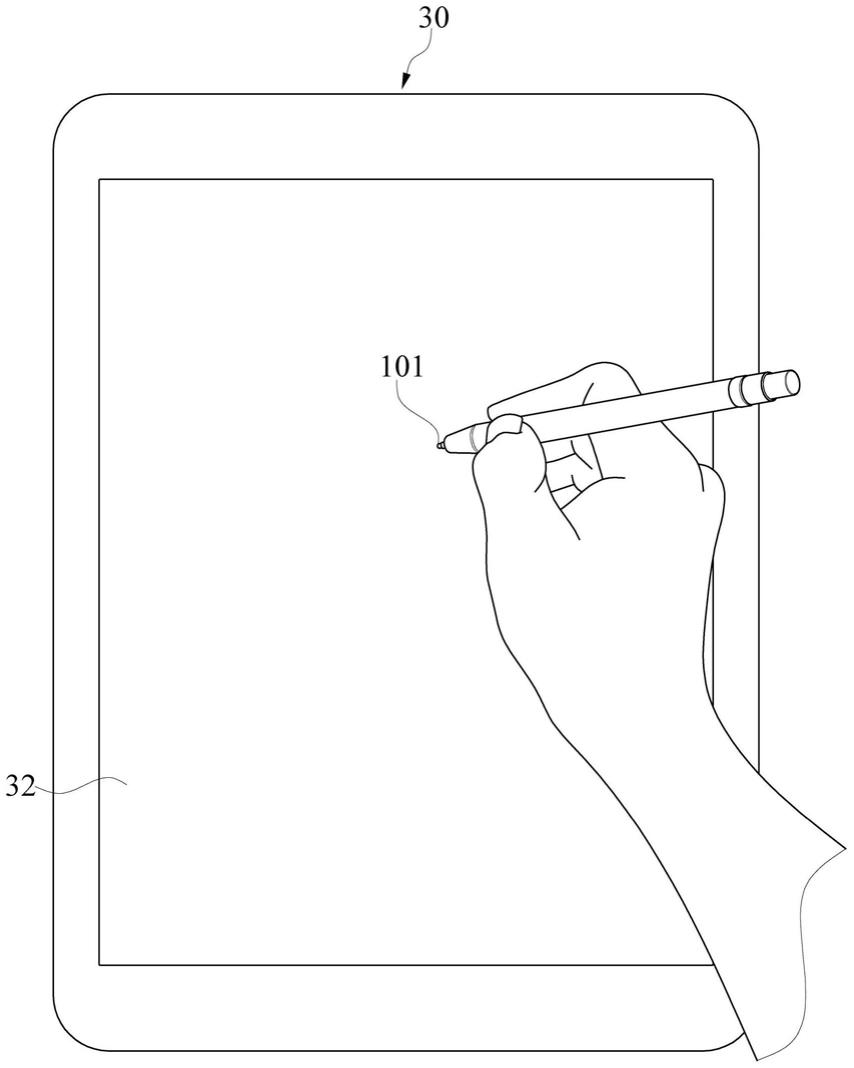
12.图1为本技术实施例的签名辨识系统的使用状态示意图。
13.图2为本技术实施例的书写笔的结构示意图。
14.图3为本技术实施例的签名辨识系统的系统框图。
15.图4为本技术的签名辨识方法的其中一种实施例的流程图。
16.图5为本技术的签名辨识方法的另一种实施例的流程图。
具体实施方式
17.本技术提供一种基于空中签名辨认技术的签名辨识系统及其方法。虽然本技术不需受到任何技术原理或概念所限制,但发明人发现,过去对于空中签名的辨识技术虽然已经发展到足以应用的程度,但都是利用人类的肢体自由端的运动轨迹来作为签名。以至于进行空中签名时需要较大的空间,使得空中签名辨认技术无法应用在日常生活。
18.根据本技术的设计,空中签名是指书写笔的非书写端在三维空间中的运动轨迹。所述非书写端由于通常在书写时距离书写笔的运动轴心较书写端至运动轴心的距离更远,使非书写端运动轨迹得到适当放大,成为有价值的空中签名。这种空中签名就可以用来作为一种生物特征,成为辨认签名者同一性的根据。
19.以下是通过特定的具体实施例来说明本技术所公开有关“书写笔、签名辨识方法及其系统”的实施方式,本领域技术人员可由本说明书所公开的内容了解本技术的优点与效果。本技术可通过其他不同的具体实施例加以施行或应用,本说明书中的各项细节也可基于不同观点与应用,在不背离本技术的构思下进行各种修改与变更。另外,本文中所使用的术语“或”,应视实际情况可能包括相关联的列出项目中的任一个或者多个的组合。
20.请参阅图1至图3,分别为本技术实施例的签名辨识系统的使用状态示意图、书写笔的结构示意图以及签名辨识系统的系统框图。如图所示,本技术的基于空中签名辨认的签名辨识系统,主要包括书写笔10以及签名辨认装置20;其中,书写笔10可为签名笔,但不以此为限。签名辨识系统通常也会包括一个书写轨迹产生装置30,例如为触控屏幕;但,书写轨迹产生装置30也可以是可在书写笔10的书写端101接触或接近时,可以记录书写笔10的书写端101在书写轨迹产生装置30表面的运动轨迹的任何装置,例如电容式或其他形式的签名板。在本技术的优选实施例中,书写笔10具备无线通信能力,可与签名辨认装置20建立无线通信通道,以交换数据。书写轨迹产生装置30通常与签名辨认装置20以有线方式连接,以将书写轨迹产生装置30所记录的书写端101的运动轨迹数据传送给签名辨认装置20。在本技术的多个实施例中,签名辨认装置20配置在一个计算机设备(例如台式计算机、笔记本计算机、平板计算机、智能手机等装置)内,而书写轨迹产生装置30(例如为触控屏幕)就是所述计算机设备的触控屏幕。当然,其他类型的设备、装置以及其他类型的通信方式都可以应用在本技术中。
21.配合图2所示,本技术的书写笔10可以形成长杆状,以便利于手持,但不以此为限。根据本技术的实施例,非书写端到握持基准点的距离与书写端到握持基准点的距离比例越大,辨认效果越好。所以,书写笔10的形状主要包括呈杆状的本体100,即细长形状的本体,并提供一个握持段,所述握持段包含握持基准点10p。握持基准点10p是指当以手握持本体100签名时,本体100运动所绕的中心点。
22.进一步地,书写笔10还包括书写端101以及书写端101相对于握持基准点10p的运动感测端102。如前所述,运动感测端102到握持基准点10p的距离应大于书写端101到握持基准点10p的距离,且其比例优选在2至10倍之间,更优选在2至5倍之间,最好为2.5倍。此外,为了放大运动感测端102的运动轨迹倍率,书写端101到握持基准点10p的连线与运动感测端102到握持基准点10p的连线两者形成至少90度的角度a,所述角度a优选为120度到180度之间,最好为160度到180度之间;通常,所述角度a即为180度,以便利于书写笔10的制造,但所述角度并非任何技术限制。
23.其中,书写轨迹的诱发器11设置于书写端101,以用于在书写轨迹产生装置30的感应表面32上产生书写轨迹。感应表面32通常是设置在计算机装置、平板装置、行动装置、刷卡机等电子装置(未在图中示出)的感应表面。在本技术的常见应用上,感应表面32配置在一种电容性电子装置上以提供一个平面,在所述平面下方排列多个感应单元,每一个感应单元通常是电容单元,可以在诱发器11经过所述感应单元时引发所述感应单元的作用从而改变其状态,例如改变电容值。所述状态改变在所述平面上的分布组成诱发器11在所述平面上移动的轨迹。诱发器11的材质可采用目前市场上电容式触控笔头材质,例如包括导电棉、表面涂导电漆的橡胶、导电硅胶、导电纤维等的导电材质,诱发器的形状并无任何限制。
24.图2显示本技术一种实施例的书写笔10还可具有空中签名产生器12,空中签名产生器12设置于运动感测端102。空中签名产生器12的结构主要包括运动感测装置121、第一通信装置122、控制装置123以及电源供应器124。
25.运动感测装置121用于感测运动感测端102的三维空间运动,并以预定时间而间隔且连续地输出所述三维空间运动的至少一个维度的读值,例如,运动感测装置121可于一分钟内,每三秒输出一次读值,但不以此为限。运动感测装置121为适合应用于本技术的书写笔10的运动感测装置,包括各种市售的惯性感测组件,例如加速度计、陀螺仪、磁力计等。这种运动感测装置通常制成一个芯片,而提供单轴、二轴、三轴、六轴或九轴的感测能力。因此,所述读值也可为二维或三维的读值。
26.第一通信装置122用于以无线或有线方式与外部装置建立通信通道。第一通信装置122为应用于本技术的书写笔的通信装置,包括各种市售的通信电路芯片或模块。有线通信通道可为usb信道,type c信道等。无线通信通道可为蓝芽、ieee等通道。相关技术及应用都已经为业者所熟知。
27.控制装置123连接运动感测装置121及第一通信装置122,以用来接收运动感测装置121的感测结果信息以及处理所述感测结果信息,并经由第一通信装置122传送至外部装置。在本技术的优选实施例中,控制装置123配置成:接收到开始侦测指令后,记录当下时间(即当时时间)为第一时间,获取运动感测装置121的读值,并于接收到停止感测指令后,记录当下时间(当时时间)为第二时间,以产生一个含有所述第一时间、运动感测装置121的读值及所述第二时间的空中签名档,并启动所述第一通信装置122而将所述数据(即空中签名档)传送至外界(例如外部装置,但不以此为限)。控制装置123可为电路模块或其他市售的控制器产品,且在市面上已经是成熟的产品。例如前述运动感测装置121所使用的芯片通常就已经包含一个适用的控制装置123,从而可以提供上述以及其他与运动感测相关的功能。
28.电源供应器124连接运动感测装置121、第一通信装置122与控制装置123,以对运动感测装置121、第一通信装置122与控制装置123提供电力。在各种电子组件中所使用的电源供应模块(例如干电池或锂电池,但不以此为限)都可以应用于本技术。电源供应器124也可以提供电源线(未在图中示出),以供插接于电源插头。
29.书写笔10的本体100还可包括开关13,以至少产生一个开始侦测指令与一个停止侦测指令。在本技术的优选实施例中,开关13可为按键开关、静电开关、压力感测开关等;但压力感测开关较为适用。
30.在本技术的某些实施例中,控制装置123还可以进一步包括空中轨迹描述装置1230,以用于根据运动感测装置121的读值来产生对应的空中轨迹描述数据,该空中轨迹描
述数据描述运动感测端102在所述第一时间与所述第二时间之间的运动轨迹。与前述相同,所述运动轨迹可为一维、二维或三维的运动轨迹。例如,所述空中轨迹描述装置1230可以根据一组三维的运动轨迹感测信息来产生三维的运动轨迹描述档。在这种实施例中,控制装置123经由第一通信装置122送至外部装置的空中签名档包括所述轨迹描述数据。
31.现请参考图3,以说明所述签名辨认装置20。如图3所示,所述签名辨认装置20主要包括签名数据存储装置21、第二通信装置22以及签名比对装置23。其中,签名辨认装置20可为各种市售的刷卡机,但不以此为限。
32.签名数据存储装置21用于存储多个参考空中签名档,各个参考空中签名档对应到一个签名账户。
33.第二通信装置22用于与书写笔10的第一通信装置122建立通信通道,以与书写笔10交换数据。
34.签名比对装置23用于将从书写笔10收到的一个空中签名档与签名数据存储装置21中的至少一个参考空中签名档作特征比对,并在特征比对结果的近似值高于特定临界值时,判断两个空中签名档来自相同提供者。在本技术的优选实施例中,签名比对装置23还配置成,只在第一时间、第二时间或其组合与比对时间之差值小于特定值时,才判断两个空中签名档来自相同提供者。
35.根据本技术,签名比对装置23应具有比对空中签名的能力。所称的空中签名比对可以包括将一个描述书写笔10的运动感测端102在空中运动的三维空间轨迹与另一个也是描述书写笔的运动感测端102在空中运动的三维空间轨迹(即参考空中签名档)进行比对,并根据两者的三维空间轨迹的相似度是否高于特定临界值,以判断是否来自相同的签名者,例如,两个三维空间轨迹相似度为90%,高于特定临界值(85%)即判断两个三维空间轨迹来自相同的签名者。但是,也可以是将一个描述书写笔10的运动感测端102在空中运动的轨迹投影在特定平面形成的平面轨迹与另一个也是描述书写笔10的运动感测端102在空中运动的轨迹投影在特定平面形成的平面轨迹(即后述的参考平面签名档)两者进行比对,以判断是否来自相同的签名者。其中,平面轨迹的判断方式可与上述三维空间轨迹的判断方式相同。
36.就三维空间轨迹的比对而言,目前已有动态时间扭曲方法(dynamic time warping method)可供应用。至于二维空间轨迹的比对法,则是相当成熟的技术。将三维空间的轨迹转化成在特定平面上的投影平面轨迹,也是一种常见的技术。发明人发现,事实上只需使用二维空间轨迹的比对法,就可以提供正确的判断。至少是因为如下所述的实施例中,另外还使用一个平面签名比对步骤,以提高空中签名的比对效果。
37.为了提供平面签名比对功能,在本技术的一些优选实施例中,签名数据存储装置21另外存储多个参考平面签名档,各个参考平面签名档对应到一个参考空中签名档及一个签名账户。在这种实施例中,第二通信装置22还配置成可与书写轨迹产生装置30建立通信通道,以交换数据。或者,在签名辨认装置20中配备第三通信模块24,以与书写轨迹产生装置30建立通信通道。如前所述,书写轨迹产生装置30提供可与诱发器11互动的一个感应表面32,从而记录诱发器11在感应表面32的运动,产生描述所述运动轨迹的平面签名档。在应用上,所述平面签名档包括所述运动的起始时间信息与结束时间信息。
38.根据本技术的设计,在本技术的优选实施例中,签名比对装置23比对签名的步骤
包括:
39.将从书写笔收到的一个空中签名档与签名数据存储装置中的至少一个参考空中签名档作特征比对,并在特征比对结果的近似值高于特定临界值且第一时间、第二时间或其组合与起始时间、结束时间或其组合之差值小于特定值时,判断两个空中签名档来自相同提供者。例如,签名数据存储装置21或签名比对装置23可预先存储有关起始时间及结束时间的数据;当第一时间与第二时间的时间差为20秒,起始时间与结束时间的时间差为25秒,且20秒与25秒的差值小于特定值(例如6秒)时,配合特征比对结果进行判断两个空中签名档是否来自相同提供者,但时间的比对方式不以此为限。
40.在本技术的另一些优选实施例中,签名比对装置23比对签名的步骤包括:
41.将从书写笔收到的一个空中签名档与签名数据存储装置中的至少一个参考空中签名档作特征比对,且将从书写轨迹产生装置收到的一个平面签名档与签名数据存储装置中的至少一个参考平面签名档作为特征比对;以及
42.在空中签名档与参考空中签名档的特征比对结果的近似值高于第一临界值(比对方式可参可前述内容,第一临界值可定义为85%,但不以此为限),且所述平面签名档与所述参考平面签名档的特征比对结果的近似值高于第二临界值时(比对方式可参可前述内容,第一临界值可定义为90%,但不以此为限),判断两个空中签名档来自相同提供者。
43.此外,在本技术的其他优选实施例中,签名比对装置23比对签名的步骤包括:
44.将从所述书写笔收到的一个空中签名档与所述签名数据存储装置中的至少一个参考空中签名档作特征比对,且将从所述书写轨迹产生装置收到的一个平面签名档与所述签名数据存储装置中的至少一个参考平面签名档作特征比对;以及
45.在所述空中签名档与所述参考空中签名档的特征比对结果的近似值高于第一临界值,且所述平面签名档与所述参考平面签名档的特征比对结果的近似值高于第二临界值,且第一时间、第二时间或其组合与起始时间、结束时间或其组合之差值小于特定值时,判断两个空中签名档来自相同提供者。
46.以下说明本技术的签名辨识方法的几种优选实施例。图4为本技术的签名辨识方法的其中一种实施例的流程图。如图所示,本技术所提供的签名辨识方法包括以下步骤:
47.首先,在步骤s301中,启动书写笔10,书写笔10可为上述各种书写笔的其中一种。接着,在步骤s302中,记录一个开始操作的第一时间,获取运动感测装置121的读值,并记录停止操作的第二时间,以产生含有第一时间、运动感测装置121的读值及第二时间的空中签名档。接下来,在步骤s303中,将空中签名档与存储多个参考签名档的签名数据存储装置21中的一个特定参考空中签名档进行特征比对。所述特定参考空中签名档可以是根据书写笔10开始记录空中签名轨迹前用户输入的编号、姓名等数据而特定的。以此方式就不须与所述签名数据存储装置21中的所有签名档比对。最后,在步骤s304中,当所述特征比对结果的近似值高于特定临界值且所述第一时间及所述第二时间与比对时间之差值小于特定值时,则进入步骤s305,判断两个空中签名档(即空中签名档与参考空中签名档)来自相同提供者;若特征比对结果不符合上述条件,则判断两个空中签名档来自不同提供者,接着,再次执行步骤s301,或者,书写笔10可发出警告信号,不予操作。
48.如前所述,本技术的签名辨识方法也可另外包括根据所述运动感测装置121的读值,产生描述所述运动感测装置121运动轨迹的运动轨迹数据,以及将所述运动轨迹数据包
含在所述空中签名档中的步骤。所述运动轨迹可为一维、二维或三维的。
49.在本技术的一些优选实施例中,签名辨识方法还可包括比对平面签名轨迹。这种实施例的辨识方法如图5的流程图所示。本技术的签名辨识方法可包括以下步骤:
50.首先,在步骤s401中,启动书写笔10,同时启动一个书写轨迹产生装置30。接着,在步骤s402中,接收所述书写笔10送来的一个空中签名档。接下来,在步骤s403中,所述书写轨迹产生装置30捕捉所述书写笔10的运动轨迹,产生描述所述运动轨迹的平面签名档。其中,所述空中签名档与所述平面签名档都包括所述运动轨迹(获取数据)的起始时间信息与结束时间信息。
51.接着,在步骤s404中,将所述书写轨迹产生装置30送来的平面签名档与存储多个参考签名档的一个签名数据存储装置21中的一个参考平面签名档作特征比对,并将从书写笔10收到的一个空中签名档与签名数据存储装置21中的至少一个参考空中签名档作特征比对。接下来,在步骤s405中,当两者的特征比对结果的近似值高于特定临界值且第一时间、第二时间或其组合与起始时间、结束时间或其组合之差值小于一特定值时,则进入步骤s406,判断两个空中签名档与两个平面签名档都是来自相同提供者,即平面签名档与参考平面签名档来自相同提供者且空中签名档与参考空中签名档来自相同提供者;而若两者的特征比对结果不符合上述条件,则判断两个空中签名档与两个平面签名档来自不同提供者,接着,再次执行步骤s401,或者,书写笔10、签名辨认装置20、书写轨迹产生装置30中的至少一者可发出警告信号,不予操作。
52.在本技术的其他实施例中,步骤404也可配置成:
53.将从书写笔10收到的一个空中签名档与签名数据存储装置21中的至少一个参考空中签名档作特征比对,且将从书写轨迹产生装置30收到的一个平面签名档与签名数据存储装置21中的至少一个参考平面签名档作特征比对;以及
54.在所述空中签名档与所述参考空中签名档的特征比对结果的近似值高于第一临界值且所述平面签名档与所述参考平面签名档的特征比对结果的近似值高于第二临界值时,判断两个空中签名档来自相同提供者。
55.以上的签名辨识方法可以应用在各种控制上。例如,请求核准一项操作,特别是与电子装置、电子商务、信息应用相关的操作。在这种操作中,系统(特别是云端系统)接受到一个操作请求,启动所述书写笔,进行签名辨认。在辨认成功时依照请求操作;在辨认不成功时则发出警告信号,不予操作。
56.如上所述,本技术提供一种新颖的签名比对机制。本技术提供书写笔,书写笔的非书写端配置有运动感测装置。在用户使用所述书写笔在一个平面书写轨迹产生装置书写时,除了记录所述平面书写轨迹外,还记录所述非书写端(即运动感测端102)的运动轨迹。比对时可在所述运动轨迹比对成功、所述平面书写轨迹比对成功、所述运动轨迹与所述平面书写轨迹比对成功,或前述三种中的任一种与时间差计算结果正确时,判断所述平面签名、空中签名或其两者是来自特定用户。在本技术的设计下,不但可以提高签名认证的正确性,也可降低空中签名的技术门槛。
57.以上所公开的内容仅为本技术的优选可行实施例,并非因此局限本技术的权利要求书的保护范围,所以凡是运用本技术说明书及附图内容所做的等效技术变化均包含在本技术的权利要求书的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。