1.本发明涉及永磁同步电机伺服系统的控制技术领域,特别涉及一种永磁同步电机惯量辨识方法、系统及存储介质。
背景技术:
2.永磁同步电机因其结构简单、动态性能好、控制精度高和效率高等优点广泛应用于数控机床、工业机器人等高精度的伺服系统。为了提高伺服系统的控制性能,需要对负载惯量进行辨识,实时获得准确的惯量值。landau离散时间算法属于在线辨识方法的一种,其中自适应增益的值会影响收敛速度和辨识精度,现有的方法无法兼顾收敛速度和辨识精度。
技术实现要素:
3.发明目的:本发明的目的是提出一种永磁同步电机惯量辨识方法,可以实现对自适应律的自适应增益进行实时调节,实现较好收敛速度的同时保证辨识精度。
4.本发明的另一目的是提出一种可以实施上述辨识方法的系统以及存储有上述方法实例化的计算机程序的存储介质。
5.技术方案:本发明所述的永磁同步电机惯量辨识方法,包括如下步骤:
6.s1:将转动惯量作为系统的输入,获得辨识惯量所需要的转矩电流和机械角速度;
7.s2:将电磁转矩作为系统的输入,获得含有待辨识参数的机械运动方程,并对机械运动方程进行离散化,获得参考模型;
8.s3:根据参考模型建立可调模型;
9.s4:根据landau离散时间算法建立待辨识参数的自适应律;
10.其中,在所述步骤s4中,通过计算两次相邻辨识值的误差,调节自适应律的自适应增益,自适应律的自适应增益β的调整公式β(k)为:
[0011][0012]
式中,k
p
为比例系数,ki为积分系数,ts为采样时间,e为两次相邻辨识值的误差。
[0013]
进一步的,所述步骤s2中的参考模型为:
[0014]
ωm(k)=2ωm(k-1)-ωm(k-2) b(k)δte(k-1)
[0015]
式中,b为待辨识参数,ωm为电机的机械角速度,te为电机的电磁转矩,δte(k-1)=te(k-1)-te(k-2)。
[0016]
进一步的,所述步骤s3中的可调模型为:
[0017]
ωg(k)=2ωg(k-1)-ωg(k-2) bg(k-1)δte(k-1)
[0018]
式中,ωg为电机角速度的估计值,bg为待辨识量的估计值。
[0019]
进一步的,所述步骤s4中的自适应律为:
[0020]
[0021]
式中,β为自适应增益系数,δω(k)=ωm(k)-ωg(k)。
[0022]
本发明所述的永磁同步电机惯量辨识系统,包括:辨识模块,用于根据landau离散时间算法建立待辨识参数的自适应律,实现待辨识参数的辨识;自适应增益系数调节模块,用于根据两次相邻辨识值的误差反馈,采用比例积分控制调节辨识模块的自适应增益系数。
[0023]
本发明所述的存储介质,包括计算机程序,所述计算机程序被设置为运行时实现上述永磁同步电机惯量辨识方法。
[0024]
有益效果:与现有技术相比,本发明具有如下优点:引入变增益因子算子,根据辨识值的误差大小进行自适应增益β的自动调整,对于常规方法中收敛速度和辨识精度不可同时兼得的问题,表现出了很好的适用性。
附图说明
[0025]
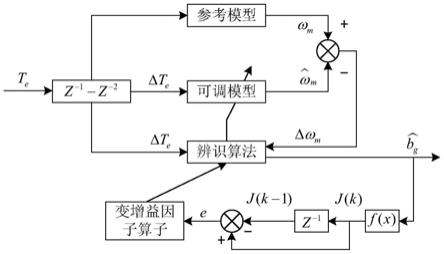
图1为本发明实施例的辨识系统的原理框图;
[0026]
图2为带辨识算法后的永磁同步电机矢量控制框图。
具体实施方式
[0027]
下面结合附图对本发明的技术方案作进一步说明。
[0028]
根据本发明实施例的永磁同步电机惯量辨识方法,包括如下步骤:
[0029]
s1:将转动惯量作为系统的输入,获得辨识惯量所需要的转矩电流和机械角速度;
[0030]
s2:将电磁转矩作为系统的输入,获得含有待辨识参数的机械运动方程,并对机械运动方程进行离散化,获得参考模型;
[0031]
s3:根据参考模型建立可调模型;
[0032]
s4:根据landau离散时间算法建立待辨识参数的自适应律;
[0033]
其中,在所述步骤s4中,通过计算两次相邻辨识值的误差,调节自适应律的自适应增益。
[0034]
上述辨识方法,通过向landau离散时间算法中引入变增益因子算子,根据相邻两次的辨识值之间的误差自动调节自适应增益β,从而实现较快的收敛速度的同时保证辨识精度。
[0035]
在landau离散时间算法中,自适应增益β的值越大,收敛速度越快,辨识误差越大;反之自适应增益β的值越小,收敛速度越慢,辨识误差越小,所以在本实施例中,通过比例积分控制器对自适应增益β进行在线调节,具体过程如下:
[0036]
永磁同步电机的双闭环控制系统如图2所示,永磁同步电机伺服系统的矢量控制通常采用id=0,在永磁同步电机中的机械运动方程为:
[0037][0038]
式中:ωm为电机的机械角速度,j为系统的转动惯量,b为粘滞摩擦系数,t
l
为负载转矩,te为电机的电磁转矩。
[0039]
根据landau离散时间算法,设置系统的采样时间为ts,当采样频率足够高,采样间隔足够小时,可以忽略粘滞摩擦系数b,对机械运动方程离散化,可得:
[0040][0041]
根据离散化的机械运动方程,可以得到前一时刻离散后的机械运动方程为:
[0042][0043]
在电机的实际运行过程中,由于系统的采样时间ts很短,所以认为在一个控制周期内负载不发生剧烈变化,认为负载基本不变,即:
[0044]
t
l
(k-1)=t
l
(k-2)
ꢀꢀꢀ
(4)
[0045]
由式(2)和式(3)可得:
[0046][0047]
令δte(k-1)=te(k-1)-te(k-2),可得到:
[0048]
ωm(k)=2ωm(k-1)-ωm(k-2) b(k)δte(k-1)
ꢀꢀꢀ
(6)
[0049]
将式(6)作为参考模型,实际转子机械角速度ωm作为参考模型得输出,根据参考模型可以得到可调模型:
[0050]
ωg(k)=2ωg(k-1)-ωg(k-2) bg(k-1)δte(k-1)
ꢀꢀꢀ
(7)
[0051]
辨识的电机转子机械角速度ωg(k)为可调模型的输出。
[0052]
将参数模型与可调模型的输出误差用δω表示,形式如下:
[0053]
δω(k)=ωm(k)-ωg(k)
ꢀꢀꢀ
(8)
[0054]
根据landau离散时间算法设计自适应规律,如下:
[0055][0056]
式中:bg(k)为辨识目标;β是自适应增益系数。
[0057]
以电机系统的转动惯量j为辨识目标,当前辨识结果j(k)与前一刻的辨识值j(k-1)之间的差值为误差e,可以表示为:
[0058]
e=|j(k)-j(k-1)|
ꢀꢀꢀ
(10)
[0059]
对误差进行比例积分运算,获得自适应律的自适应增益系数的变化量,并可获得自适应增益β的调整公式β(k)为:
[0060][0061]
式中:k
p
为比例系数,ki为积分系数。
[0062]
通过引入比例积分控制,利用辨识结果的反馈误差来动态调整自适应增益β,当辨识偏差较大时,说明振荡较大,收敛慢,会增大β的值,减少收敛时间;当辨识偏差较小时,说明辨识结果接近收敛,则减小β的值,减小最后辨识结果的误差。上述方法可以在辨识过程中,动态调节自适应增益的值,前期提高收敛速度,后期减小辨识误差,既能保证辨识速度,也能保证辨识的准确度。
[0063]
根据本发明实施例的永磁同步电机惯量辨识系统,包括辨识模块和比例积分调节模块。其中辨识模块用于根据landau离散时间算法建立待辨识参数的自适应律,实现待辨识参数的辨识。比例积分调节模块用于根据两次相邻辨识值的误差反馈,采用比例积分控制调节辨识模块的自适应增益系数。
[0064]
根据本发明实施例的存储介质,存储有上述永磁同步电机惯量辨识方法实例化的计算机程序。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。