1.本发明涉及用于食品的容器内保存的蒸馏器系统,并且更具体地涉及一种用于在蒸馏器中处理食品的系统和方法,其中食品在热处理过程中被搅动。
背景技术:
2.蒸馏器已被广泛应用于用于商业巴氏杀菌或灭菌处理的食品的容器内保存。蒸馏器通常包括压力容器,用于容纳包含食品的容器(以下有时称为"容器内食品","产品","容器","食物"等),食品被布置在篮中或托盘上,该容器堆叠在支撑部或其它类型的支持结构上。食品的商业灭菌/巴氏杀菌可通过将加热介质施加到容器内食品而发生,包括例如过热蒸汽或热水。这种加热介质可以通过喷射到堆叠的容器上来施加。或者,可以将加热介质引入蒸馏器容器中,以浸没保持食品的容器。
3.可以采用搅动蒸馏器而不是利用静态系统,在静态系统中,容器在巴氏灭菌或灭菌期间在蒸馏器容器内保持静止。在巴氏杀菌/灭菌过程中在蒸馏器中对食品的搅动可导致食品具有较短的处理时间并改善食品的质量和外观(例如,颜色)。半对流产品和含有微粒的那些产品尤其受益于搅动。食品外观的改进部分源于必须对食品施加较低的热负荷或负荷以实现所需的巴氏杀菌或灭菌水平。
4.在蒸馏器中的容器内食品的搅动已通过不同的系统完成。在一种系统中,容器的托架/支撑部被装载在位于蒸馏器容器内的滚筒内。滚筒围绕其纵向轴线旋转,以在产生食品的端对端搅动。尽管端对端搅动是相当有效的,但它需要用以旋转滚筒的驱动系统和在旋转过程中在蒸馏器内用于滚筒的延伸支撑结构,以及用于将处理流体引入到旋转滚筒中的系统。此外,每个容器内食品不一定具有相同的g-作用力(g-force)/运动轮廓。例如,在筐的中心处的容器将经历与在筐的边缘处的产品不同的运动。
5.另一种类型的搅动蒸馏器依赖于容器内食品的线性搅动。通过在蒸馏器内的相对短的距离上来回移动食品,改变在沿前后行程的端点处的方向上所引起的、在其内容物上产生搅动效果的容器中的减速力和加速力。线性搅动的效果小于通过端对端搅动可达到的效果;然而,在许多情况下,这种"轻搅动"可以充分地减少加工时间和/或避免食品的结块,以保证相对于食品产品的简单静态热处理。此外,线性搅动允许相比端对端搅动更简单的设计。
6.典型的线性搅动系统包括由电机旋转的曲柄轴组成的驱动机构。曲柄轴和电机均位于蒸馏器的一端外部。连杆系统将曲柄轴连接到蒸馏器托架/支撑部。在这些类型的线性搅动系统中需要相对重型的工作驱动系统,包括抗衡和消除由旋转曲柄轴施加到容器内食品的力的需要。这种抗衡通常通过使用一个或多个飞轮来实现。虽然曲柄轴/飞轮系统简单可靠,但其有其局限性。
7.例如,曲柄轴/飞轮系统受限于容器的正弦运动。换句话说,由于运动来自旋转盘,所以容器被限制为在蒸馏器中来回正弦运动。这样,搅动筐的g-作用力由搅动的冲程长度(曲柄长度)和循环/分钟(旋转曲柄速度)直接限制。就这一点而言,搅动模式被限制为相同
的冲程长度和运动模式,而不管正在搅动的食品的类型和/或灭菌/巴氏消毒的阶段。
8.用于蒸馏器系统的商业灭菌/巴氏灭菌处理可包括三个阶段。在第一起始阶段期间,蒸馏器容器从诸如室温的起始温度上升到用于对食品执行热处理的第二烹饪温度。该方法的第二烹饪/保持阶段涉及在烹饪温度下保持容器的温度。最后,在该方法的第三冷却阶段期间,该容器被冷却回到正常温度。
9.在该方法的每一阶段期间,食品可在稠度、质地等方面发生改变。例如,某些食品在烹饪时会变软。因此,可能期望在该方法的一些或全部烹饪/保持阶段期间使用较少剧烈的搅动模式以防止食品的劣化。在另一示例中,食品可以在其被加热时释放淀粉,从而导致食品的稠密。对于这样的产品,可能期望在加热和/或冷却阶段的稍后部分期间使用更剧烈的搅动模式,以帮助确保食品的更均匀的热处理。
10.因此,可以理解的是,搅动能够在冲程长度、速度、加速度和g-作用力方面被改变,以对特定食品建立定制搅动模式的蒸馏器搅动系统将产生最佳的热处理的效果。
技术实现要素:
11.根据本公开的一个实施例,提供了一种用于在蒸馏器中搅动产品的系统。该系统包括夹持组件,该夹持组件被构造成选择性地在至少一个产品支撑部的第一端上施加第一夹持力和在至少一个产品支撑部的第二端上的施加第二相对夹持力;和往复组件,该往复组件被构造成在产品支撑部上施加线性力,用于使产品支撑部沿着蒸馏器往复运动。
12.根据本文描述的任何实施例,夹持组件包括第一夹持子组件和第二夹持子组件,第一夹持子组件被构造成当第一夹持子组件在至少一个产品支撑部的第一端上施加第一夹持力时,将至少一个产品支撑部的第一端固定到驱动机构的第一部分,而第二夹持组件被构造成当第二夹持组件在至少一个产品支撑部的第二端上施加第二相反夹持力时,将至少一个产品支撑部的第二端固定到驱动机构的第二部分。
13.根据本文描述的任何实施例,往复组件包括可变输入驱动机构,该可变输入驱动机构连接到往复构件。
14.根据本文描述的任何实施例,可变输入驱动机构是液压致动器。
15.根据本文描述的任何实施例,可变输入驱动机构包括位置反馈装置,该位置反馈装置被配置为向控制器输出指示往复构件的线性位置的一个或多个信号。
16.根据本文描述的任何实施例,控制器被配置为处理来自位置反馈装置的一个或多个信号,并且向可变输入驱动机构输出一个或多个信号,用于激活和控制往复杆的速度、加速度、冲程长度、频率和方向中的至少一个。
17.根据本文描述的任何实施例,夹持组件包括第一夹持子组件和第二夹持子组件,第一夹持子组件被构造成当第一夹持子组件在至少一个产品支撑部的第一端上施加第一夹持力时,将至少一个产品支撑部的第一端固定到往复构件,而第二夹持组件被构造成当第二夹持组件在至少一个产品支撑部的第二端上施加第二相对夹持力时,将至少一个产品支撑部的第二端固定到往复构件。
18.根据本文描述的任何实施例,第一夹持子组件被构造成后挡板机构,该后挡板机构被构造成当往复构件在第一方向上移动时选择性地接合至少一个产品支撑部的第一端,并且当往复构件沿第二方向移动时选择性地脱离至少一个产品支撑部的第一端。
19.根据本文描述的任何实施例,还包括防旋转组件,该防旋转组件被构造成基本上防止往复构件围绕其轴线旋转。
20.根据本文描述的任何实施例,第一夹持子组件包括枢转臂和第一支撑部止动件,枢转臂枢转地固定到往复构件的第一端,第一支撑部止动件限定在枢转臂上,第一支撑部止动件被构造成当往复构件沿第一方向移动时接合至少一个产品支撑部的第一端。
21.根据本文描述的任何实施例,第二夹持子组件包括第二支撑部止动件,当往复构件在第一方向和第二方向上移动时,第二支撑部止动件能够随往复构件移动。
22.根据本文描述的任何实施例,第二支撑部止动件能够通过第二驱动机构沿着往复构件移动,以选择性地接合至少一个产品支撑部的第二端。
23.根据本文描述的任何实施例,第二驱动机构是固定到往复构件的液压致动器。
24.根据本文描述的任何实施例,往复组件被配置成以非正弦运动模式沿着蒸馏器移动产品支撑部。
25.根据本文描述的任何实施例,非正弦运动模式的冲程长度在约0.10英寸和2.0英寸之间。
26.根据本文描述的任何实施例,非正弦运动模式的冲程长度在约0.5英寸和1.25英寸之间。
27.根据本文描述的任何实施例,产品支撑部在蒸馏器的第一端和第二端之间往复运动,并且其中非正弦运动模式至少部分地由在第一方向上的多个冲程限定。
28.根据本文描述的任何实施例,非正弦运动模式包括在多个冲程的每一个冲程之间的运动中暂停。
29.根据本文描述的任何实施例,非正弦运动模式的至少一部分在约5-200个循环/分钟之间的范围内执行。
30.根据本文描述的任何实施例,非正弦运动模式的至少一部分在约20-100个循环/分钟之间的范围内执行。
31.根据本文描述的任何实施例,其中,非正弦运动模式的至少一部分以在约0.05g-2g之间的范围内的g-作用力执行。
32.根据本文描述的任何实施例,非正弦运动模式的至少一部分以在约0.3g-1g之间的范围内的g-作用力执行。
33.根据本文描述的任何实施例,往复组件被配置为改变速度、冲程长度、频率、加速度和g-作用力中的至少一个,以使产品支撑部沿蒸馏器在非正弦运动模式下移动。
34.根据本文描述的任何实施例,产品支撑部在蒸馏器的第一端和第二端之间往复运动,并且其中非正弦运动模式至少部分地由在第一方向上的多个冲程限定。
35.根据本文描述的任何实施例,可变输入驱动机构位于处理容器的外部,并且往复构件延伸到处理容器中。
36.根据本文描述的任何实施例,包括:
37.处理容器,该处理容器被构造成容纳至少一个产品支撑部;
38.低摩擦支撑系统,该低摩擦支撑系统用于支撑至少一个产品支撑部以沿着处理容器移动;
39.根据本文描述的任何实施例的夹持组件,该夹持组件被构造成在至少一个产品支
撑部的第一端上选择性地施加第一夹持力和在至少一个产品支撑部的第二端上施加第二相对夹持力;和
40.根据本文描述的任何实施例的往复组件,该往复组件被构造成在至少一个产品支撑部上施加线性力,用于使至少一个产品支撑部沿着处理容器往复移动。
41.根据本公开的另一个实施例,提供了一种处理蒸馏器中的产品的方法。该方法包括:将产品布置在至少一个产品支撑部中以沿着蒸馏器移动;在至少一个产品支撑部的第一端上施加第一夹持力和在至少一个产品支撑部的第二端上施加第二相对夹持力;和向至少一个产品支撑部施加往复力。
42.根据本公开的另一个实施例,一种在蒸馏器中处理产品的方法,包括:将产品布置在至少一个产品支撑部中以沿着蒸馏器移动;和使至少一个产品支撑部沿蒸馏器以非正弦运动模式往复运动。
43.根据本文描述的任何方法,还包括通过能够由可变输入驱动机构移动的往复构件向至少一个产品支撑部施加往复力。
44.根据本文描述的任何方法,还包括在第一方向上移动往复构件,以使第一支撑部止动件与至少一个产品支撑部的第一端接合。
45.根据本文描述的任何方法,还包括在第二方向上移动第二支撑部止动件,以使第二支撑部止动件与至少一个产品支撑部的第二端接合,并且在第一支撑部止动件和第二支撑部止动件之间夹持至少一个支撑部。
46.根据本文描述的任何方法,还包括在第二方向上沿着往复构件移动第二支撑部止动件。
47.根据本文描述的任何方法,还包括在第一方向上随往复构件移动第二支撑部止动件。
48.根据本文描述的任何方法,还包括在第一方向上移动第二支撑部止动件,以使第二支撑部止动件与至少一个产品支撑部的第二端脱离。
49.根据本文描述的任何方法,还包括在第二方向上移动往复构件,以使第一支撑部止动件与至少一个产品支撑部的第一端脱离。
50.根据本文描述的任何方法,还包括使至少一个产品支撑部以在约0.10英寸和2.0英寸之间的冲程长度沿着蒸馏器往复运动。
51.根据本文描述的任何方法,还包括使至少一个产品支撑部以在约0.5英寸和1.25英寸之间的冲程长度沿着蒸馏器往复运动。
52.根据本文描述的任何方法,还包括在约5-200个循环/分钟之间的范围内向至少一个产品支撑部施加往复力。
53.根据本文描述的任何方法,还包括在约20-100个循环/分之间的范围内向至少一个产品支撑部施加往复力。
54.根据本文描述的任何方法,还包括以在约0.05g-2g之间的范围内的g-作用力向至少一个产品支撑部施加往复力。
55.根据本文描述的任何方法,还包括以在约0.3g-1g之间的范围内的g-作用力向至少一个产品支撑部施加往复力。
56.根据本文描述的任何方法,还包括:当向至少一个产品支撑部施加往复力时,改变
速度、冲程长度、频率、加速度和g-作用力中的至少一个。
57.根据本文描述的任何方法,还包括使至少一个产品支撑部在蒸馏器的第一端和第二端之间往复运动,并且在第一方向上以多个冲程向至少一个产品支撑部施加往复力。
58.根据本文描述的任何方法,还包括在多个冲程中的每一个冲程之间暂停至少一个产品支撑部的往复运动。
59.根据本文描述的任何方法,还包括在热处理的至少第一阶段和第二阶段期间向至少一个产品支撑部施加往复力。
60.根据本文描述的任何方法,还包括根据用于第一阶段的第一搅动运动轮廓和根据用于第二阶段的第二搅动运动轮廓使至少一个产品支撑部往复运动。
61.根据本文描述的任何方法,非正弦运动模式包括在第一方向上的多个冲程。
62.根据本文描述的任何方法,还包括使至少一个产品支撑部以在约0.5英寸和1.25英寸之间的冲程长度沿着蒸馏器往复运动。
63.根据本文描述的任何方法,非正弦运动模式包括在第一方向上的多个冲程。
64.根据本文描述的任何方法,还包括使至少一个产品支撑部在约5-200个循环/分钟之间的范围内在蒸馏器的第一端和第二端之间往复运动。
65.根据本文描述的任何方法,还包括改变速度、冲程长度、频率、加速度和g-作用力中的至少一个以限定非正弦运动模式的至少一部分。
66.根据本文描述的任何方法,还包括使至少一个产品支撑部在蒸馏器的第一端和第二端之间往复运动,并且在第一方向上以多个冲程向至少一个产品支撑部施加往复力。
67.根据本文描述的任何方法,还包括使至少一个产品支撑部在热处理的至少第一阶段和第二阶段期间沿蒸馏器以非正弦运动模式往复运动。
68.根据本文描述的任何方法,还包括根据用于第一阶段的第一搅动运动轮廓和根据用于第二阶段的第二搅动运动轮廓使至少一个产品支撑部往复运动。
69.根据本文描述的任何方法,其中,非正弦运动模式包括锯齿轮廓、s弯曲轮廓和梯形轮廓中的至少一个。
70.根据本文描述的任何方法,其中,非正弦运动模式包括锯齿轮廓、s弯曲轮廓和梯形轮廓中的至少一个。
71.一种用于在蒸馏器中搅动产品的系统,该系统包括夹持组件,该夹持组件被构造成在至少一个产品支撑部的第一端上选择性地施加第一夹持力和在至少一个产品支撑部的第二端上的第二相对夹持力;和往复组件,其被配置成在产品支撑部上施加线性力,以使产品支撑部沿蒸馏器往复运动。
72.蒸馏器系统包括:处理容器,该处理容器被构造成容纳至少一个产品支撑部;低摩擦支撑系统,该低摩擦支撑系统用于支撑至少一个产品支撑部以沿着处理容器移动;夹持组件,该夹持组件被构造成在至少一个产品支撑部的第一端上选择性地施加第一夹持力和在至少一个产品支撑部的第二端上选择性地施加第二相对夹持力;和往复组件,该往复组件被构造成在至少一个产品支撑部上施加线性力,以用于沿着处理容器往复移动至少一个产品支撑部。
73.一种在蒸馏器中处理产品的方法包括:将产品布置在至少一个产品支撑部中以沿着蒸馏器移动,在至少一个产品支撑部的第一端上施加第一夹持力和在至少一个产品支撑
部的第二端上施加第二相对夹持力,和向至少一个产品支撑部施加往复力。
74.一种在蒸馏器中处理产品的方法,包括将产品布置在至少一个产品支撑部中以沿着蒸馏器移动,和使至少一个产品支撑部沿蒸馏器在非正弦运动模式下往复运动。
75.提供本发明内容是为了以简化的形式介绍将在下面的具体实施方式中进一步描述的概念的选择。本发明内容不旨在确定所要求保护的主题的关键特征,也不旨在用作帮助确定所要求保护的主题的范围。
附图说明
76.本发明的前述方面和许多伴随的优点将通过参考以下详细描述结合附图而变得更容易理解,其中:
77.图1是具有根据本公开的示例性实施例形成的蒸馏器搅动系统的蒸馏器的等距视图;
78.图2a是具有图1所示的蒸馏器搅动系统的蒸馏器的等距横截面图,其中所述蒸馏器搅动系统被示出为处于第一负载/卸载位置;
79.图2b是具有图2a所示的蒸馏器搅动系统的蒸馏器的侧视图;
80.图2c是具有图2a所示的蒸馏器搅动系统的蒸馏器的第一夹持子组件的等距视图;
81.图2d是具有图2a所示的蒸馏器搅动系统的蒸馏器的第二夹持子组件的等距视图;
82.图3a是具有图1所示的蒸馏器搅动系统的蒸馏器的等距横截面图,其中所述蒸馏器搅动系统被示出为处于第二加载位置;
83.图3b是具有图3a所示的蒸馏器系统的蒸馏器的侧视图;
84.图3c是具有图3a所示的蒸馏器搅动系统的蒸馏器的第一夹持子组件的等距视图;
85.图3d是具有图3a所示的蒸馏器搅动系统的蒸馏器的第二夹持子组件的等距视图;
86.图4a是具有图1所示的蒸馏器搅动系统的蒸馏器的等距横截面图,其中所述蒸馏器搅动系统被示出为处于第三夹持位置;
87.图4b是具有图4a所示的蒸馏器系统的蒸馏器的侧视图;
88.图5是在具有图1-4所示的蒸馏器系统的蒸馏器中使用的支撑部的示例性实施例;
89.图6是用于在具有图1-4所示的蒸馏器搅动系统的蒸馏器内搅动负载的示例性方法;
90.图7是示出用于热处理蒸馏器内的负载的第一示例性非正弦搅动模式的视图;
91.图8是示出用于热处理蒸馏器内的负载的第二示例性非正弦搅动模式的视图;
92.图9是示出用于热处理蒸馏器内的负载的第三示例性非正弦搅动模式的视图;
93.图10是示出用于热处理蒸馏器内的负载的第四示例性非正弦搅动模式的视图;
94.图11是示出用于热处理蒸馏器内的负载的第五示例性非正弦搅动模式的视图;
95.图12是示出用于热处理蒸馏器内的负载的第六示例性非正弦搅动模式的视图;
96.图13是示出用于热处理蒸馏器内的负载的第七示例性非正弦搅动模式的视图;
97.图14是示出用于热处理蒸馏器内的负载的第八示例性非正弦搅动模式的视图;
98.图15是示出用于热处理蒸馏器内的负载的第九示例性非正弦搅动模式的视图;
99.图16a是示出用于以第一旋转曲柄速度热处理蒸馏器内的负载的正弦搅动模式的现有技术位置、速度和加速度轮廓的视图;
100.图16b是示出用于以第二旋转曲柄速度热处理蒸馏器内的负载的正弦搅动模式的现有技术位置、速度和加速度轮廓的视图;
101.图16c是示出用于以第三旋转曲柄速度热处理蒸馏器内的负载的正弦搅动模式的现有技术位置、速度和加速度轮廓的视图;以及
102.图17是示出用于热处理蒸馏器内的负载的非正弦搅动模式的位置、速度和加速度轮廓的视图。
具体实施方式
103.下面结合附图阐述的详细描述旨在作为对所公开主题的各种实施例的描述,并且不旨在表示唯一的实施例,其中相同数字表示相同元件。本公开中描述的每个实施例仅作为示例或说明提供,并且不应被解释为优选或优于其它实施例。本文提供的说明性示例不旨在穷举或将本公开限制为所公开的精确形式。类似地,本文所述的任何步骤可以与其它步骤或步骤的组合互换,以便实现相同或基本相似的结果。
104.在以下描述中,阐述了许多具体细节以便提供对本公开的示例性实施例的透彻理解。然而,对于本领域技术人员来说显而易见的是,可以在没有这些具体细节中的一些或全部的情况下实践本公开的许多实施例。在一些情况下,未详细描述众所周知的工艺步骤,以免不必要地模糊本公开的各个方面。此外,应当理解,本公开的实施例可以采用本文描述的特征的任何组合。
105.本技术可包括对"方向"的参考,诸如“向前”,“向后”,“前”,“后”,“远端”,“近端”,“向上”,“向下”,“在”,“外”,“延伸”,“前进”和“缩回”。本技术中的这些参考和其它类似或对应的参考仅用于帮助描述和理解本公开,并且不旨在将本公开限制于这些方向。
106.本技术还可以参考数量和数字。除非特别说明,否则这样的数量和数字不应被认为是限制性的,而是与本技术相关联的可能的数量或数字的示例。同样在这方面,本技术可以使用术语"多个"来指代数量或数字。就这一点而言,术语“多个”是指大于一个的任何数字,例如两个、三个、四个、五个等,术语“约”,“近似”等,表示所述值的正或负5%。
107.本文提供的以下描述和说明涉及一种用于食物产品(食品)的容器内商业灭菌的蒸馏搅动系统和方法,所述食品能够至少在冲程长度、速度、加速度和重力(g-force)方面发生变化以产生用于食品的定制搅动模式。尽管蒸馏器搅动系统和方法被描述为对包含在袋中的食品是有用的,但是蒸馏器搅动系统和方法也可用于在诸如盒、罐、瓶、管、托盘等其它类型的容器中保存的食品。因此,本文提供的描述和图示不应被视为限制。
108.现在将详细描述蒸馏器搅动系统和方法。具体地,将首先描述用于在商业灭菌/巴氏灭菌处理期间搅动容器内食品的系统。
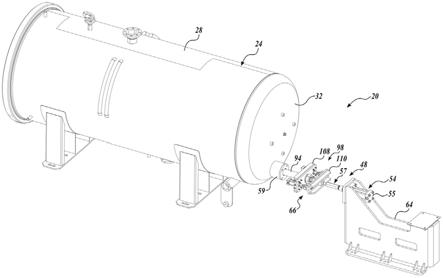
109.图1-4示出了与热处理容器24一起使用的蒸馏器搅动系统20的示例性实施例,热处理容器24具有容器主体28,容器主体28由在后端处的中凹头部32和在前端处的容器门(为了清楚起见未示出)包围。应当理解,图1-4未示出典型的蒸馏器的所有细节,诸如用于将加热介质引入蒸馏器中或用于移除和/或再循环加热介质的系统的详细方面。蒸馏器容器的这些方面对于熟悉蒸馏器设计和技术的人员来说是已知的。例如,可以利用不同的加热介质和输送系统,包括将过热水喷射到产品容器上或用热水或饱和蒸汽填充蒸馏器的内部。
110.容器24构造成容纳由一个或多个诸如前筐36a和后筐36b(在下文中有时统称为"筐36")的产品支撑部限定的负载,所述一个或多个产品支撑部被构造成以本领域公知的方式保持容器内食品(未示出)。在一个示例性实施例中,筐36被构造成保持包含食品(未示出)的多个袋。在另一个实施例中,如图5所示,产品支撑部由以本领域公知的方式堆叠在支架(未示出)上的一个或多个托盘236限定。当使用托盘236时,将容器内食品被(手动地或自动地)装载到托盘236的袋240中以执行热处理。负载可以替代地由被配置用于保持多个容器内食品的任何其它合适的产品支撑部(诸如袋、罐、瓶子、桶、盘等)限定。
111.筐36可手动地或利用装载装置(诸如梭动器、链式输送机驱动器等)装载到容器24中的低摩擦支撑系统上。低摩擦支撑系统被构造成在筐36被装载到容器24中时以及在筐36沿着容器的内部以低摩擦运动搅动时支撑筐36。这可以通过不同的方式实现。在所描绘的实施例中,低摩擦支撑系统由两个或更多个辊组件40限定,该两个或更多个辊组件40在容器24的底部部分中沿着容器24的长度延伸(在横截面视图中仅示出一个辊组件)。辊组件40以已知的方式抵靠筐36的底侧。例如,辊组件40可由在轨道中对齐的辊限定,这些辊可容纳在相应成形的槽38内,该相应成形的槽38分别限定在前筐36a和后筐36b的底部基部44a和44b(有时称为"筐36的基部44"等)上。
112.在可选实施例中,辊可以轴连接到筐36的底侧。在这样的实施例中,适当的轴承可以插入在辊和它们的轴之间,以最小化辊上的旋转摩擦。作为又一替代方案,可以使用滚珠轴承形式的滚珠来代替辊。滚珠轴承可以安装在容器24的地板结构中或筐36的基部44上。应当理解,低摩擦支撑系统可以替代地被限定为具有任何其它适合的合适结构。
113.在筐36被装载到容器24中的辊组件40上的情况下,筐可通过蒸馏器搅动系统20沿着容器24的长度线性往复运动(以下有时描述为"搅动"等)。蒸馏器搅动系统20通常被构造成可选地通过搅动系统与筐36的直接联接以非正弦和/或可定制的模式来搅动筐36。在这方面,蒸馏器搅动系统20通常包括往复组件48和夹持组件50,该往复组件48被构造成以可变输入搅动筐36以产生非正弦和/或可定制的模式,该夹持组件50被构造成将筐36直接固定到往复组件用于搅动。
114.将首先详细描述往复组件48。往复组件48被构造成以可变输入沿着容器24的长度线性地来回移动筐36,使得搅动不限于正弦运动模式。在所描绘的实施例中,往复组件48包括可变输入驱动机构54,该可变输入驱动机构54适于沿着容器24的长度来回驱动往复构件或杆58。
115.一个或多个杆支撑件60可以从容器24的底部延伸,用于在往复杆58在容器24中来回移动时支撑往复杆58。杆支撑件60可以是任何合适的低摩擦装置,该低摩擦装置被构造成保持往复杆58与驱动机构54的轴向对齐,同时允许往复杆58来回移动而没有实质性限制。例如,杆支撑件60可以由紧固(固定)到支架或其它安装组件的衬套限定。可以替代地使用任何其它合适的支撑组件。
116.一个或多个合适的防旋转部件可用于基本上防止往复杆58围绕其纵向轴线旋转。例如,可以沿往复杆58的长度限定键槽,该键槽容纳从与往复杆58交界的合适结构延伸的键。在这方面,杆支撑件60可以包括键,该键被构造成与往复杆58上的键槽接合,或者防旋转部件可以替代地限定在如下所述的其它部件上。
117.与仅在一个方向上旋转的现有技术的飞轮系统相反,可变输入驱动机构54能够通
过反转驱动方向而沿前后方向移动杆58。驱动机构54可以是适合于以定制的(非正弦)搅动模式沿着容器24的长度来回线性地驱动往复杆58的任何可变输入驱动机构。在所描绘的实施例中,驱动机构54是液压线性致动器,该液压线性致动器具有缸55,该缸具有联接到往复杆58并与往复杆58轴向对齐的活塞杆56。活塞杆56可以以任何合适的方式(诸如利用联接组件57)在其远端处联接到往复杆58的后端。应当理解,可以替代地使用其它驱动机构,诸如电动线性致动器、伺服电机、被构造成分别接合前筐36a和后筐36b的第一气动控制气囊和第二气动控制气囊、气动/液压活塞或被构造成通过线性冲程施加线性力的任何其它机械致动器。
118.驱动机构54包括合适的电气和/或机械部件,该电气和/或机械部件被构造成独立地改变往复杆58的冲程长度、在冲程致动/运动之间暂停/停止往复杆58、改变往复杆58的g-作用力等,以创建定制的非正弦搅动模式。例如,如果驱动机构54被构造成液压缸,则其可以包括合适的阀和控制件,用于以特定模式和/或以特定的加速度、速度等驱动杆58。以这种方式,往复杆58(并且因此筐36)可以针对容器内食品的搅动需求以各种不同的搅动模式移动。例如,驱动机构54被构造成以至少相对于图7-15示出和描述的搅动模式移动往复杆58。
119.在一方面,驱动机构54可包括用于在热处理过程中监测活塞杆56(以及因此往复杆58)的线性位置的位置传感器或反馈装置。例如,线性编码器可用于感测活塞杆56的线性位置并且将指示杆位置的一个或多个信号输出到集成或单独的(有线或无线)控制器(未示出)。控制器可以被配置为响应于一个或多个编码器信号,向驱动机构54输出一个或多个信号,以致动和控制往复杆58的速度、加速度、方向等(例如通过控制液压缸的比例阀,以遵循预编程的搅动运动轮廓)。控制器可以是任何合适的电子客户端设备,诸如计算机、个人数字助理、蜂窝电话、平板计算机或其中可执行计算机软件或其它数字内容的任何其它合适的设备。电子客户端设备可以使用工业标准通信协议(诸如hart、modbus、4-20ma和h1以及其它协议)直接或通过远程连接来控制。
120.驱动机构54可以安装到容器24外部的支撑结构64上。这样,驱动机构54不需要被构造成承受容器24的内部极端温度变化。此外,通过在单独结构上定位容器24外部,容器24将不会受驱动机构54的主要往复力的影响。在这方面,支撑结构64是被构造成沿着期望的往复轴线定位往复杆58以接合并搅动筐36并且用于承受驱动机构54的主要往复力的任何合适的结构。然而,应当理解,驱动机构54和支撑结构64可以替代地被构造成位于容器24的内部。
121.然而,由于驱动机构54位于容器24外部,往复杆58可以经由具有中心孔(未标记)的合适的杆密封/衬套构件59穿过容器24的中凹头部32。合适的密封界面(诸如具有o形环等)可以被限定在杆密封/衬套构件59的外表面和容器24的中凹头部32之间以及杆密封/衬套构件59的内表面与往复杆58之间。
122.现在将详细描述被构造成将筐36直接紧固到往复组件48以用于搅动的夹持组件50。夹持组件50包括限定在往复杆58的前端处的第一夹持子组件62和限定在往复杆58的后端处的第二夹持子组件66,用于分别接合前筐36a和后筐36b并在前筐36a和后筐36b上施加相反的夹持力。在这方面,第一夹持子组件62和第二夹持子组件66还将筐36a和36b固定在一起。
123.参照图2a至图2c、图3a至图3c和图4a至图4b,第一夹持子组件62通常被构造成选择性地接合前筐36a并对前筐36a施加夹持力。更具体地,第一夹持子组件62可在第一位置和第二位置之间移动,在第一位置中,第一夹持子组件62与前筐36a脱离并且筐36可自由地从蒸馏器加载/卸载(参见图2a-2c),在第二位置中,第一夹持子组件62定位成接合前筐36a并对前筐36a施加夹持力(参见图3a-3c和4a-4b)。第一夹持子组件62可通过分别延伸和缩回往复杆58而在第一位置和第二位置之间移动。第一夹持子组件62可以是用于选择接合前筐36a并在前筐36a上施加夹持力的任何合适的构造。
124.在所描绘的实施例中,第一夹持子组件62通常被构造为后挡板机构,该后挡板机构被配置为选择性地接合前筐36a并将夹持力施加在前筐36a上。更具体地,第一夹持子组件62包括枢转臂72,枢转臂72通过支架74或其它合适的结构枢转地固定到往复杆58的前端。第一枢转销78横向延伸穿过枢转臂72的第一端并穿过支架74以限定横向于往复杆58的纵向轴线的第一枢转轴线。枢转臂72可沿着紧固在容器24底部的枢转辊82移动并围绕枢转辊82枢转。当往复杆朝向容器24的前部和后部伸出和缩回时,枢转臂72可在下降位置和升高位置或者第一位置和第二位置之间沿着枢转辊82滚动并围绕枢转辊82枢转。
125.更具体地,枢转臂72可围绕第一枢转轴线在至少第一位置和第二位置之间移动,在第一位置上,枢转臂72向下枢转并且不与往复杆58轴向对齐(参见图2a至图2c),在第二位置上,枢转臂72与往复杆58轴向对齐(参见图3a至图3c和图4a至图4b)。枢转臂72可通过用驱动机构54使往复杆58向前移动直到第一枢转销78的枢转轴线与枢转臂辊82的枢转轴线基本上对齐。在这种基本上对齐的情况下,枢转臂辊82不再在枢转臂72下方提供支撑,因此枢转臂72可围绕第一枢转销78的枢转轴线向下枢转。
126.枢转臂72可通过利用驱动机构54使往复杆58缩回而移动到第二位置。当往复杆58缩回时,辊82的外表面向上推动枢转臂72,直到枢转臂72与往复杆58的轴线对齐。当枢转臂72向上移动到第二位置时,第一支撑部或筐止动件84从枢转臂72的前端横向延伸并且被定位成接合前筐36a。在所描绘的实施例中,筐止动件84被定位成接合限定在前筐36a的前端上的底部基部部分44a上的夹具接合板68。
127.夹具接合板68从前筐36a的底部基部44a向下延伸,使得当第一筐止动件84移动到第二位置时,第一筐止动件84可以在夹具接合板68的前方移动。在该第二位置,往复杆58可以朝向容器24的后部缩回,直到第一筐止动件84在夹具接合板68的前部施加夹持力。本文描述的防旋转特征确保当第一筐止动件84移动到第二位置时,第一筐止动件84与夹具接合板68的对齐。
128.在往复杆58移动到缩回位置之后,通过第二夹持子组件66在后筐36b上施加相反的夹持力。第二夹持子组件66可以是任何合适的构造,其通常被构造成在往复杆58处于缩回位置的情况下选择性地接合后筐36b并将夹持力施加在后筐36b上。
129.在所描绘的实施例中,第二夹持子组件66包括第二支撑部或筐止动件90,第二支撑部或筐止动件90可沿着往复杆58在第一位置与第二位置之间移动,在第一位置中,第二筐止动件90与后筐36b脱离(参见图3a,3b和3d),在第二位置中,第二筐止动件90与后筐36b接合并对后筐36b施加夹持力(参见图4a-4b)。第二筐止动件90具有用以可移动地联接到往复杆58并且与后筐36b接合的合适构造。例如,第二筐止动件90可以是大致圆柱形的,其具有用于容纳往复杆58的中心孔92。
130.第二筐止动件90限定在夹持杆94的远端上,夹持杆94被构造成朝向和远离后筐36b移动。夹持杆94可朝向后筐36b线性移动,直到第二筐止动件90对后筐36b的底部44b施加夹持力,并且其可远离后筐36b线性移动以释放夹持力。在所描绘的实施例中,夹持杆94同心地定位往复杆58上,使得其沿着与往复杆58相同的轴线移动(并且在这方面,夹持杆94基本上是管)。在这方面,夹持杆94包括用于容纳往复杆58的中心孔96、以及衬套100和101或其它低摩擦界面,诸如轴承、润滑等,设置在夹持杆94和往复杆58之间,使得夹持杆94可以沿着往复杆58的长度容易地滑动。夹持杆94还沿着往复杆58的长度延伸,使得夹持杆94通过杆密封/衬套构件59延伸进入和离开容器24。在这方面,衬套103或其它合适的低摩擦界面也可设置在杆密封/衬套构件59和夹持杆94之间,以允许夹持杆94(和往复杆58)容易地滑动穿过其中。
131.参考图2d,杆密封/衬套构件59还可以包括防旋转部件,以基本防止夹持杆94围绕其纵向轴线旋转。例如,第一键槽63可以沿着夹持杆94的长度限定,第一键槽63容纳横向延伸穿过杆密封/衬套构件59的键65。而且,第二筐止动件90可以包括防旋转部件,以防止往复杆58围绕其纵向轴线旋转,诸如横向延伸穿过第二筐止动件90的圆柱形主体的键93,该键93可被容纳在沿着往复杆58的长度延伸的狭槽95内。
132.夹持杆94可通过任何合适的驱动机构朝向和远离后筐36b移动。例如,夹持杆94可以通过液压线性致动器98移动,所述液压线性致动器98具有从缸104延伸的活塞杆102。然而,应当理解,可以替代地使用其它机构,例如电动线性致动器、伺服电机、气动/液压活塞或被构造成施加力以沿杆58的长度在线性方向上移动杆94的任何其它机械致动器。
133.在一个方面,液压线性致动器98可以包括用于在热处理过程中监测活塞杆102(以及因此监测夹持杆94)的线性位置的位置传感器或反馈装置。例如,线性编码器可用于感测活塞杆102的线性位置并且将指示杆位置的一个或多个信号输出到集成或单独的(有线或无线)控制器(未示出)。控制器可以被构造成响应于一个或多个编码器信号,向液压线性致动器98输出一个或多个信号,以用于致动和控制夹持杆94的移动。
134.液压线性致动器98被布置成使得当活塞杆102从缸104分别伸出和缩回时,活塞杆102使夹持杆94朝向和远离后筐36b线性地移动。这可以以任何合适的方式执行。例如,在所描绘的实施例中,液压线性致动器98在固定到夹持杆94的第一杆附接构件108和固定到往复杆58的第二杆附接构件110之间延伸。当活塞杆102延伸时,第一杆附接构件108和夹持杆94共同地远离第二杆附接构件110并且朝向后筐36b移动。同时,第二杆附接构件110保持在往复杆58上的固定位置处。活塞杆102可以延伸直到限定在夹持杆94的端部处的第二筐止动件90接合在后筐36b上并对后筐36b施加夹持力。
135.在夹持位置,如图4a至图4b所示,第一筐止动件84和第二筐止动件90在前筐36a和后筐36b上施加相反的夹持力,以将筐固定在一起并且将筐固定到往复杆58用于搅动。合适的间隔件130(诸如缓冲器、垫圈等)可以设置在前筐36a和后筐36b之间,以在它们被搅动时为施加在筐上的夹持力提供足够的支承面积,和/或允许热处理流体在筐36a和36b之间通过以执行最佳的热处理。
136.参照图6,现在将描述用于将筐36直接固定至往复组件48或从往复组件48分离用于搅动的示例性方法。在夹持组件50处于步骤308处的第一、夹持位置之后,可以开始固定筐36的方法,其中如图4a-4b所示,第一夹持子组件62和和第二夹持子组件66协作地在筐36
上施加线性夹持力。这可以是负载的热处理过程(例如,容纳在筐或托盘中的食品的商业灭菌)结束时。代替地,夹持组件50可以处于第一、夹持位置,而筐36还没有被装载到容器24中。
137.无论如何,在夹持组件50处于第一、夹持位置的情况下,该方法包括初始步骤,用于将夹持组件50移动到第二、未夹持位置,使得诸如筐36的支撑部可以从容器24卸载或装载到容器24中。为了将夹持组件50移动到第二、未夹持位置,在步骤310处,第二筐止动件90随着液压线性致动器98的活塞杆102的相应缩回而缩回,以释放由夹持组件50施加在筐36上的夹持力。
138.参照图3a-3c,第二筐止动件90被示出为在往复杆58上向后缩回并且与后筐36b脱离。活塞杆102的冲程长度可以被预定义,以确保将有足够的间隙来延伸往复杆58并且允许第一夹持子组件62脱离前筐36a。换句话说,在后筐36b的轴向位置和缩回的第二筐止动件90之间存在足够的间隙,使得第二筐止动件90可以与往复杆58一起向前行进,而不在下一步骤314中接合后筐36b。
139.在这方面,当第二筐止动件90缩回时,往复杆58可以通过驱动机构54在容器24中延伸或向前移动,如步骤314所示。当往复杆58伸出时,第一夹持子组件62使前筐36a脱离,如图2a-2c所示。更具体地,枢转臂72沿着由枢转辊82限定的辊平面朝向容器24的前部移动,直到第一枢转销78与枢转辊82基本上对齐。这种对齐可以在往复杆58延伸到驱动机构54的第一预定冲程长度的情况下发生。此时,枢转臂72能够围绕第一枢转销78的轴线向下旋转。当枢转臂72向下旋转时,第一支撑部或筐止动件84从前筐36a的向前移动路径脱离并移出,如步骤318所示,并且如图2a至图2c所示。驱动机构54的一个或多个传感器可用于跟踪活塞杆56(并且因此跟踪往复杆58)的线性位置以指示其何时已经延伸预定的第一冲程长度;并且因此,指示其何时枢转臂72已经向下枢转。
140.一旦往复杆58延伸第一预定冲程长度并且第一筐止动件84从前筐36a的向前移动路径脱离并移出,如步骤314和318所示,筐36可从容器24卸载和/或被装载到容器24中,如步骤322所示。当筐36可被装载到容器24中时,筐36被装载到辊组件40上并且朝向容器24的后部移动,直到后筐36b接合第二筐止动件90为止。然后,夹持组件50可以被移动返回到第一夹持位置,使得可以在热处理期间搅动筐。
141.为了使夹持组件50移动返回到第一夹持位置,往复杆58在步骤326处缩回,以使枢转臂72相应地向后移动。枢转臂72沿着由枢转辊82限定的辊平面朝向容器24的后部移动,同时绕第一枢转销78的轴线向上枢转。往复杆58缩回驱动机构54的第二预定冲程长度,直到第一筐止动件84接合前筐36a的夹具接合板68,如步骤330所示并且如图3a-3c所示。驱动机构54的传感器可用于跟踪活塞杆56(以及因此往复杆58)的线性位置,以指示其何时已经缩回第二预定冲程长度以向上旋转枢转臂72。
142.当往复杆58在步骤326缩回时,整个第二夹持子组件66也缩回。因此,一旦往复杆58缩回以使第一筐止动件84与前筐36a的夹具接合板68接合,如步骤330所示,第二夹持子组件66的驱动机构在步骤334中被激活以使第二筐止动件90沿着往复杆58向前移动。第二筐止动件90沿着往复杆58从第一位置向前移动到第二位置,在第一位置中,第二筐止动件90与后筐36b(参见图3a-3b和3d)脱离接合,而在第二位置中,第二筐止动件90与后筐36b接合并且在后筐36b上施加夹持力(参见图4a-4b)。
143.更具体地,当液压线性致动器98的活塞杆102从气缸104延伸第三预定冲程长度时,夹持杆94向前移动。活塞杆102延伸第三预定冲程长度(可由一个或多个传感器检测),使得第二筐止动件90与后筐36b接合并且将加持力施加在后筐36b上。由于枢转臂72已经处于向上位置,第一夹持子组件62和第二夹持子组件66将线性夹持力共同地施加在筐36上,以将筐36a和36b固定在一起并且将筐固定到往复杆58。换句话说,前筐36a和后筐36被夹持在第一筐止动件84和第二筐止动件90之间。以这种方式,驱动机构54的往复力可以有效地传递到筐36用于搅动。
144.就这一点而言,在步骤338中,往复杆58通过驱动机构54进行往复运动以搅动筐36。如步骤342中指示,以定制的(可选的非正弦)模式搅动筐36,直到热处理已经完成。一旦热处理已经完成,可以重复该方法步骤以从容器24卸载筐36,并将新的一组支撑部(筐、托盘等)装载到容器24中用于热处理。
145.本公开的蒸馏器搅动系统20包括往复组件48,该往复组件48能够改变负载的冲程长度、速度(冲程位置/时间)、频率(循环/分钟)、加速度和g-作用力,以创建用于特定食品的定制(可选地非正弦)搅动模式或运动轮廓。例如,可以在热处理过程中调节(延长或缩短)冲程长度以适应食品中的粘度变化。作为具体示例,当食品加热时,产品的粘度可能会减小,而较长的冲程长度可以更好地匹配食品的自然"晃动"运动。
146.在食品的搅动运动轮廓的过程中,还可以改变搅动速度和/或频率。例如,当食品具有在容器内部快速加热的流体时,调节搅动速度和/或频率可能是有益的,但是食品也具有以较慢的速率加热的颗粒。这样的食品可以受益于在热处理开始时的较高的搅动速度和/或频率以帮助容器中的流体快速地加热,和一旦流体被加热并且颗粒继续加热时的较慢的速度和/或频率。如果可以使用较慢的搅动速度和/或频率,则搅动设备将承受较少的磨损和毁坏,并且节省了能量。
147.搅动运动轮廓也可以被设计成允许在热处理过程中以不同的加速度和g-作用力下搅动负载。例如,在热处理过程中变得脆弱、柔软或精细的某些食品在热处理过程开始时(例如在一些或全部启动期间)可以具有包含高加速度/g-作用力的搅动运动轮廓,然后一旦食品开始软化,则搅动运动轮廓可以被改变以具有较低(更平缓的)加速度/g-作用力,以避免损坏食品。
148.具有定制的冲程长度、速度、频率、加速度和/或g-作用力的搅动运动轮廓可以在热处理的特定时间期间或阶段被施加为恒定变量。例如,在产品的初始加热期间可以使用剧烈的搅动轮廓,当食品变热时可以使用较不剧烈的搅动轮廓,因为食品会变得更脆弱,并且然后,一旦产品已经冷却或由于在烹饪过程中释放的淀粉而变得更稠密,则可以使用更剧烈的搅动轮廓。具有定制的冲程长度、速度、频率、加速度和/或g-作用力的搅动运动轮廓也可以被应用作为可变函数,例如,在多个冲程上增加和减小,然后在初始产品加热阶段(起始)、烹饪阶段和冷却阶段中的至少一个阶段期间在一种模式下重复。
149.图8-15描绘了用于在蒸馏器内对食品执行热处理的非正弦搅动模式的非限制性示例。图8-15中以图形方式描绘的非正弦搅动模式可以用类似于上述往复组件48的往复组件或用任何其它合适的往复组件来实施。
150.在图8中以图形方式描绘的示例性搅动运动轮廓包括在冷却阶段开始和结束时产生较高速度的更强加速度和在烹饪阶段和冷却阶段的第一部分期间产生较低速度的更平
缓的加速度。在该示例性搅动运动轮廓中,冲程长度和频率保持基本恒定。如上所述,这样的搅动运动轮廓对于在被加热时变得脆弱的食品是有益的。在替代实施例中,烹饪阶段和冷却阶段的第一部分可以包括用于较不脆弱产品的更强烈的加速度(更高的速度),而在冷却阶段的起始和结束期间可以使用更平缓的加速度。可替代地,加速度可以在一些或所有阶段期间根据需要而被改变以有效地处理食品。
151.图9中图形化地描绘的示例性搅动运动轮廓是"搅动和暂停"重复轮廓,该轮廓可以在一些或所有的热处理阶段过程中使用,并且用于整个阶段或阶段的一部分。更具体地,负载可以沿着所述蒸馏器来回搅动几次、暂停,然后以重复或变化的模式再次搅动。"暂停"被理解为在负载运动的停止,这不仅仅是在负载反转方向时(即,当负载在改变方向之前技术上停止时)发生的运动的中断。例如,"暂停"可以包括大于例如0.1秒的运动停止。
152.这种"搅动和暂停"轮廓可以用于周期性地剧烈搅动或摇动食品以混合其内容物(用于改进的热传递),而暂停剧烈搅动/混合以帮助保持食品的完整性。可以理解的是,食物的持续剧烈搅动/混合(即,其在过程中不断摇动)可能会导致食品变质。图9中图形描绘的搅动运动轮廓可以包括一次"剧烈摇晃"和(一次)暂停、几次剧烈摇晃和暂停,或者适合于食品的任何其它组合或模式。冲程长度、速度、频率、加速度和g-作用力在图9中以图形方式描绘的搅动运动轮廓的搅动部分期间保持基本恒定;然而,应当理解的是,这些中的一个或多个可替代地被改变。
153.图10中图形化地描绘的示例性搅动运动轮廓是"可变冲程长度"搅动运动轮廓,其可以在一些或所有热处理阶段期间使用,并且用于全部阶段或一部分阶段。更具体地,可以在改变用于每个循环的冲程长度和速度的同时沿着蒸馏器来回搅动负载(其中一个循环等于一个完整的向前运动和一个完整的反向运动以使负载返回到原始位置),但是同时保持频率(循环/分钟)恒定,从而产生更大或更小的加速度。更具体地,通过保持频率基本恒定,搅动运动轮廓将包括对于更长的每单位时间冲程长度在食品上施加更大的加速度(g-作用力),和对于更短的每单位时间冲程长度施加更小的加速度(g-作用力)。这样的搅动运动轮廓可以如图10中图形描绘的那样实现,其中轮廓具有基本上恒定的频率(即,t1、t2和t3基本相等),但是每个循环包括与先前循环不同的冲程长度(诸如三个不同冲程长度中的一个)。如图所示,可以重复该模式。例如,可变冲程长度搅动运动轮廓可以包括在0.5"处的四个冲程、在1"处的四个冲程、在0.6"处的六个冲程,每个冲程在大约相同的持续时间内发生,然后重复。这种导致施加在食品上的不同的加速度的模式化可变冲程长度搅动运动轮廓对于在食品加热和冷却时具有不同粘度的食品可以是有益的。
154.在图11中图形描绘的示例性搅动运动轮廓是"在一个方向上的快速加速"轮廓,其可以在一些或所有热处理阶段期间使用,并且用于全部阶段或该阶段的一部分。更具体地,可以在第一方向上(即,当延伸往复杆58时)用通常快速的加速度沿着蒸馏器来回搅动负载,以及在返回方向上(即,当缩回往复杆58时)用慢的加速度搅动负载。在图11中图形描绘的示例性搅动运动轮廓中,速度和频率保持基本恒定,尽管它们可以替代地改变。这种"在一个方向上快速加速"的搅动运动轮廓对于如袋、管或其它食物容器的容器将是有益的,该容器通常在搅动过程中在支撑部上或在支撑部中来回滑动。
155.例如,如果支撑部是托盘,例如图5中所示的托盘236,则将容器内食品被装载到托盘236的袋240中以执行热处理。通常在袋240的边缘和食品容器之间限定足够的公差,以适
应容器到袋中的自动或机器人装载。这种“溢出”允许容器内食品在搅动、划伤或磨损某些容器(例如小袋)的过程中,特别是在加热时在袋子240内来回移动。搅动因此,可以定制搅动运动轮廓以帮助保持容器抵靠袋边缘的位置,从而避免或最小化容器的任何磨损或划伤。
156.更具体地,通过以冲程结束时的缓慢减速在第一方向上快速加速食物容器,并且以冲程结束时的缓慢加速和快速减速在相反方向上使食物容器返回,食物容器将抵靠蒸馏器托盘袋的一侧或边缘处被推动,并且在热处理过程中(或根据需要在热处理的某部分过程中)停留在该边缘处。换句话说,搅动力基本上仅在一个方向上施加。以这种方式,不需要夹持机构等将容器保持在抵靠着托盘袋边缘的固定位置。应当理解,该搅动运动轮廓还可用于将任何合适的容器(诸如罐或瓶)固定在任何合适的支撑部(例如筐)内。
157.通过在热处理的一个或多个阶段期间对负载施加暂停、停止或脉冲还可以改变食品的搅动运动轮廓。例如,负载可以在一个方向上以高速移动、暂停或停止,然后以较慢的速度在相同方向上移动,以对食品施加不同的g-作用力。脉冲的大小、冲程长度和频率可以变化,以对容器内的食品质量产生期望的搅动效果。
158.图12中图形化地描绘的示例性搅动运动轮廓是"在一个方向上快速加速"轮廓,其基本上类似于图11中描绘的轮廓,其可以在一些或所有热处理阶段期间使用,并且用于全部阶段或阶段的一部分。然而,在图12中以图形方式描绘的搅动运动轮廓中,搅动在第一方向上的快速加速(即,通过伸出往复杆58)和缓慢加速以在第二方向上返回(通过缩回往复杆58)之间暂停或停止搅动。例如,负载可以在第一方向上快速移动、急停、以较慢的速度返回、缓慢停止,然后以相同的速度和/或频率或以不同的速度和/或频率重复,如图所示。利用这样的搅动轮廓,搅动基本上仅在一个方向上施加搅动力,使得食物容器将保持抵靠托盘或筐的边缘被定位。
159.在图13中以图形方式描绘的示例性搅动运动轮廓也是"在一个方向上快速加速"轮廓,其基本上类似于图12中所描绘的轮廓,并且可以在一些或所有热处理阶段期间使用,并且用于全部阶段或阶段的一部分。然而,在图13中以图形方式描绘的搅动运动轮廓中,当其以较慢的加速度在第二方向上(通过缩回往复杆58)返回之前以较快的加速度在第一方向上移动(通过使往复杆58伸出)时,暂停或停止搅动。例如,负载可以在第一方向上快速移动、急停、再次在第一方向上快速移动、急停、再次在第一方向上快速移动、急停,然后以较慢的速度返回并缓慢停止。可以在一些或所有阶段(或一个或多个阶段的一部分)期间重复该模式。利用这种搅动轮廓,搅动再次基本上仅在一个方向上施加搅动力,使得食物容器将保持抵靠托盘或筐的边缘定位。在单个移动或在多次停止和开始时改变方向并使负载返回到"原始"位置之前,可以创建不同的运动轮廓以在"向前"方向上多次加速和停止负载。
160.图14中图形描绘的示例性搅动运动轮廓是"在一个方向上的多个冲程"轮廓,其基本上类似于图13中描绘的轮廓,其中负载在第一方向上(通过延伸往复杆58)移动和停止/暂停若干次。然而,在图14中以图形方式描绘的搅动运动轮廓中,负载也以类似的速度和冲程长度在第二返回方向上(通过缩回往复杆58)移动和停止/暂停若干次。在图14中以图形方式描绘的搅动运动轮廓可以在一些或所有的热处理阶段期间使用,并且用于整个阶段或阶段的一部分。
161.图15中图形化地描绘的示例性搅动运动轮廓是"组合"搅动运动轮廓,其可以在一
些或全部热处理阶段期间使用,并且用于整个阶段或阶段的一部分。更具体地,负载可沿蒸馏器来回搅动,同时以可重复或半可重复的模式改变冲程长度、速度、频率、加速度和/或重力(g-作用力)搅动。图15的搅动运动轮廓是上述搅动运动轮廓中的一些或全部的组合的表示。例如,负载可以首先在第一方向上快速移动、急停、在第一方向上较慢地移动、急停、在第一方向上较快地移动、急停等,然后以较慢的速度返回到原始位置。一旦到达原始位置,负载可以以相同的冲程长度、速度和频率来回搅动,然后暂停。最后,搅动可在起始位置和返回位置之间的起点处,以相同冲程长度、速度和频率的多次重复冲程搅动负载。该模式可在部分或全部阶段(或阶段的一部分)期间重复。
162.可以理解的是,上述搅动运动轮廓的搅动效果可以通过任何非正弦运动实现,例如锯齿轮廓、s弯曲轮廓、梯形轮廓等。此外,应当理解,可以根据需要修改或组合上述示例性搅动运动轮廓,以最有效地和有效地热处理容器中的特定食品。此外,尽管运动轮廓以冲程位置和时间的形式显示,但是可以理解的是,作用在食品上的加速度和g-作用力是如位置和速度搅动运动轮廓的导数,如下文关于图16和17所述,是对容器内食品进行必要搅动的重要因素。
163.搅动可以通过某些优选范围的冲程长度、速度、频率和g-作用力或加速度来执行部分或全部上述搅动运动曲线,其单独地或组合地产生有效搅动。例如,冲程长度可以保持在约1/10英寸(0.10")至约10英寸(10")之间的宽范围内,或在该宽范围的较窄子集内,例如约1/8英寸(1/8")至约10英寸(10"),约1/10英寸(0.10")至约2英寸(2.0"),约半英寸(0.5")至约1又1/4英寸(1.25")或两英寸(2"),或适用于预期食品或轮廓的任何其它范围。
164.以上列出的示例性冲程长度范围被定义为负载在开始位置和停止位置之间移动的距离。如从上述示例性搅动运动轮廓可以理解的,轮廓可以包括在返回到"原始位置"之前的单个方向上的几个开始和停止(参见图13-15)。作为示例,使用类似于图13中图形描绘的搅动运动轮廓,负载可以从原始位置向前移动1英寸(1")、停止、向前移动1英寸半(1.5")、停止、向前移动1英寸(1"),停止、向前移动1英寸半(1.5")、停止,然后返回5英寸(5")到原始位置。在这方面,原始位置和返回位置之间的总循环长度可以是各个冲程长度的总和。
165.用于上述搅动运动轮廓的频率或每分钟的循环可以在约5-200个循环/分钟间,更优选地约10-200个循环/分钟,更优选地约20-100个循环/分钟的范围内执行。如上所述,一个循环等于一个完整的向前运动和一个完整的反向运动以将负载返回到原始位置。应当理解,频率可以取决于所使用的搅动运动轮廓的类型,并且其可以在整个循环中变化。用于上述搅动运动轮廓的g-作用力可以在约0.05g-2g间的范围内,或更优选地约0.3g-1g的范围内。
166.所述搅动运动轮廓可以以用于特定食品的配方计算机程序模块("配方模块")的形式存储在计算机的存储器中。计算机可以与蒸馏器搅动系统20的控制器有线或无线通信,或者可替代地,计算机是控制器的一部分。存储器可以存储计算机可读、计算机可执行软件/固件代码,所述计算机可执行软件/固件代码在被执行时使所述控制器执行如本文所述的各种功能,例如致动可变输入驱动机构54以执行特定搅动运动轮廓。例如,控制器可被配置为响应于一个或多个配方模块的执行而将一个或多个信号输出到驱动机构54以用于激活和控制往复杆58的冲程位置、速度、加速度、长度、方向、冲程之间的暂停时间等。
167.控制器还将与一个或多个反馈装置(例如一个或多个传感器)有线或无线通信,所述一个或多个反馈装置将监测蒸馏器搅动系统部件20的状态、位置等,以确保所容纳的食品正在经历正确的搅动运动轮廓,和/或根据需要调节轮廓。例如,可以自动调节搅动运动轮廓,用于例如不一致的摩擦力和普通零件磨损的情况。当然,自动系统所执行的校正也存在限制,在这种情况下,蒸馏器搅动系统20可以包括警报或其它反馈装置,当需要维护时,该警报或其它反馈装置可以警告操作者。
168.根据前述内容可以理解的是,搅动被构造成可选地通过搅动系统与负载的直接联接来以非正弦和/或可定制的模式搅动负载的蒸馏器搅动系统20提供优于现有技术系统的若干益处。例如,使用传统曲柄轴的现有技术系统具有与旋转曲柄速度(rpm)和曲柄长度相关的g-作用力变量。使用传统的曲柄轴对蒸馏器内部的负载进行热处理的标准搅动运动轮廓是正弦曲线,这意味着每个循环(其中一个循环等于一个完整的向前运动和一个完整的反向运动以使负载返回到原始位置)的冲程长度保持恒定。因此,可以仅通过调整曲柄轴的旋转速度(以及因此冲程/分钟)来增加或减小g-作用力。
169.为了帮助说明这一点,图16a-16c以图形方式描绘了具有标准正弦搅动运动的现有技术的曲柄轴和搅动飞轮系统的示例性第一位置、第二位置和第三位置、速度和加速度轮廓,其中每个轮廓的冲程长度基本上相同(约6英寸)。图16a所示的第一轮廓表示旋转曲柄速度为30rpm的位置、速度和加速度轮廓,图16b所示的第二轮廓表示旋转曲柄速度为40rpm的位置、速度和加速度轮廓,图16c所示的第三轮廓表示旋转曲柄速度为120rpm的位置、速度和加速度轮廓。通过比较这些轮廓可以看出,在30rpms(大约9.36英寸/秒的线性移动)时可以实现大约0.09g的加速度,在40rpms(大约12.17英寸/秒的线性移动)时可以实现大约0.14g的加速度,以及在120rpms(大约37.45英寸/秒的线性移动)时可以实现大约1.37g的加速度。为了实现适当的高加速度或g-作用力用于搅动,必须使用非常高的旋转曲柄速度(rpm)。此外,如果使用较短的冲程长度,则旋转曲柄速度将需要以显著更高的速率增加。
170.通过比较,图17以图形方式描绘了根据本公开的实施例形成的用于非正弦搅动运动轮廓的示例性位置、速度和加速度轮廓。可以仅使用1.0英寸的冲程长度实现约0.25g的加速度。此外,通过使用可变输入驱动机构54,可以独立地改变冲程长度和速度,以在特定食品上施加期望的加速度/g-作用力。例如,蒸馏器搅动系统20可以在热灭菌过程期间赋予不同的冲程长度,并且它可以增加每冲程的g-作用力输出并减少负载所经历的每分钟冲程。另一方面,使用曲柄轴的现有技术系统必须增加速度(每分钟循环)以增加施加在负载的g-作用力。
171.因此,通过使用具有可变输入驱动机构的蒸馏器搅动系统,例如具有如上所述的驱动机构54的蒸馏器搅动系统20,支撑部中的食品的运动轮廓可以适应于食品的变化特性,同时最小化往复组件48上的磨损。而且,在保持相同的商业无菌水平的同时,可减少食品的热处理时间,即使在热处理时间减少的情况下,也可以改善食品质量,并且可以通过在热处理过程中在某些时间改变运动轮廓来保持易碎/脆弱食品的完整性,以及其它益处。
172.例如,非正弦、可定制的搅动运动轮廓可以在保持相同的灭菌fo值的同时将用于一些食品的热处理时间减少约40-50%。值得注意的是,将容器内食品保持在烹饪温度下,直到满足指定的fo值,其中fo值是单位的致死率,即,细菌群体被破坏的速度。食品被加热
的速度越快,fo值的增加就越快。因此,如果食品在初始加热阶段期间被更快地加热,则其在较高温度下保持更短的整体时间,以实现相同的食品安全fo值。因此,可以理解,随着食品的较短的初始加热阶段(可通过如本文所述的非正弦、可定制的搅动运动轮廓实现),产品经历高热处理温度的总时间(食品的初始加热阶段 保持阶段)减少。结果,所容纳的食品的质量增加。
173.发明人使用根据本公开的蒸馏器搅动系统进行初步测试以测量改进的热处理效率。蒸馏器搅动系统被配置为在整个热处理过程中使用恒定速度和冲程长度施加非正弦搅动运动轮廓,所施加的g-作用力在约0.75g-0.9g之间。对于包含意大利蔬菜汤或鸡汤的纸板箱,容器中的顶部间距约为9mm,fo值为6,获得了以下结果。
[0174][0175]
可以理解,与静态蒸馏器相比,使用非正弦搅动运动轮廓的蒸馏器将两种食品的热处理时间减少约45%-50%。
[0176]
在fo值为7并且其中起始阶段为16分钟的情况下,对于具有厚度为1英寸半(1.5")并且包含斑豆或蘑菇的加仑袋包,如下结果被实现。
[0177][0178]
可以理解,使用非正弦搅动运动轮廓的蒸馏器,与静态蒸馏器相比,两种食品的热处理时间减少了约30%-50%,并且与使用摇摆运动轮廓的蒸馏器相比,两种食品的热处理时间减少了约25%-45%。
[0179]
尽管已经示出和描述了说明性实施例,但是应当理解,在不脱离本发明的精神和范围的情况下,可以在其中进行各种改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。