技术特征:
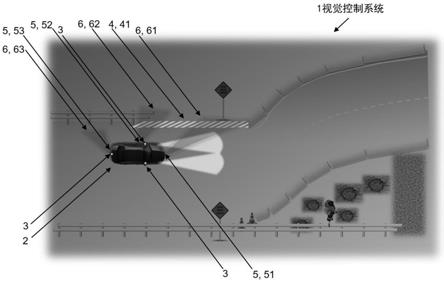
1.一种由视觉控制系统(1)执行的方法,用于在移动车辆(2)的周围环境中的弱光条件下,通过车载式后向和/或侧向的至少一个第一图像采集设备(3)来支持对象检测,所述方法包括以下步骤:在所述至少一个第一图像采集设备(3)的支持下采集(1001)位于所述移动车辆(2)的后方和/或侧面的周围环境;确定(1002)所述周围环境中的光照条件;以及在所述光照条件满足光照不充分标准时,在至少一个第一光源(5)的支持下,提供(1004)照亮所述周围环境的地面区域(6)的光输出,以通过所述至少一个第一图像采集设备(3)促进对象检测。2.根据权利要求1所述的方法,还包括以下步骤:当提供(1004)所述光输出时,至少部分地基于在所述至少一个第一图像采集设备(3)的支持下采集的所述地面区域(6)中检测到的对象(4),鉴于数字地图(22)对所述车辆(2)进行定位(1005)。3.根据权利要求1或2所述的方法,还包括以下步骤:确定(1003)情境条件,所述情境条件例如包括对象检测条件、车辆定位条件和/或周围道路使用者条件;其中,所述提供(1004)光输出包括在所述光照条件满足光照不充分标准时并且在所述情境条件满足光提供资格标准时提供照亮所述周围环境的地面区域(6)的光输出。4.根据权利要求1-3中任一项所述的方法,其中,所述提供(1004)光输出包括提供具有基于所述光照条件和/或所述情境条件的一个或多个特性的光输出。5.根据权利要求1-4中任一项所述的方法,其中,在至少一个第一光源(5)的支持下的所述提供(1004)包括在所述车辆(2)中所包括的至少一个第一光源(51、52、53)的支持下的提供,例如,包括在所述车辆(2)的下方和/或下部中所包括的至少一个第一光源(51、52、53)的支持下的提供。6.根据权利要求1-5中任一项所述的方法,其中,在至少一个第一光源(5)的支持下的所述提供(1004)包括在位于距所述车辆(2)可预定距离内的实体(7)中所包括的至少一个第一光源(54、55、56)的支持下的提供,例如,包括在辅助车辆(71)和/或基础设施(72)中所包括的至少一个第一光源(54、55、56)的支持下的提供,所述提供(1004)继而包括基于向所述实体(7)传送的、指示所述周围环境的请求信号(8)提供所述光输出。7.一种视觉控制系统(1),其用于在移动车辆(2)的周围环境中的弱光条件下,通过车载式后向和/或侧向的至少一个第一图像采集设备(3)来支持对象检测,所述视觉控制系统(1)包括:周围环境采集单元(101),其用于在所述至少一个第一图像采集设备(3)的支持下采集(1001)位于所述移动车辆(2)的后方和/或侧面的周围环境;光照条件确定单元(102),其用于确定(1002)所述周围环境中的光照条件;以及光输出提供单元(104),其用于在所述光照条件满足光照不充分标准时,在至少一个第一光源(5)的支持下,提供(1004)照亮所述周围环境的地面区域(6)的光输出,以通过所述至少一个第一图像采集设备(3)促进对象检测。8.根据权利要求7所述的视觉控制系统(1),还包括:
定位单元(105),当提供(1004)所述光输出时,所述定位单元至少部分地基于在所述至少一个第一图像采集设备(3)的支持下采集的所述地面区域(6)中检测到的对象(4),鉴于数字地图(22)对所述车辆(2)进行定位(1005)。9.根据权利要求7或8所述的视觉控制系统(1),还包括:情境条件确定单元(103),其用于确定(1003)情境条件,所述情境条件例如包括对象检测条件、车辆定位条件和/或周围道路使用者条件;其中,所述光输出提供单元(104)适于在所述光照条件满足光照不充分标准时并且在所述情境条件满足光提供资格标准时提供照亮所述周围环境的地面区域(6)的光输出。10.根据权利要求7-9中任一项所述的视觉控制系统(1),其中,所述光输出提供单元(104)适于提供具有基于所述光照条件和/或所述情境条件的一个或多个特性的光输出。11.根据权利要求7-10中任一项所述的视觉控制系统(1),其中,所述光输出提供单元(104)适于在所述车辆(2)中所包括的至少一个第一光源(51、52、53)的支持下提供,例如,适于在所述车辆(2)的下方和/或下部中所包括的至少一个第一光源(51、52、53)的支持下提供。12.根据权利要求7-11中任一项所述的视觉控制系统(1),其中,所述光输出提供单元(104)适于在位于距所述车辆(2)可预定距离内的实体(7)中所包括的至少一个第一光源(54、55、56)的支持下提供,例如,适于在辅助车辆(71)和/或基础设施(72)中所包括的至少一个第一光源(54、55、56)的支持下提供,所述光输出提供单元(104)适于基于向所述实体(7)传送的、指示所述周围环境的请求信号(8)提供所述光输出。13.一种车辆(2),其包括根据权利要求7-12中任一项所述的视觉控制系统(1)。14.一种计算机程序产品,其包括计算机程序,所述计算机程序包含计算机程序代码装置,所述计算机程序代码装置被布置成使计算机或处理器执行存储在计算机可读介质或载波上的根据权利要求1-6中任一项所述的方法的步骤。15.一种非易失性计算机可读存储介质,其上存储有根据权利要求14所述的计算机程序产品。
技术总结
本公开涉及弱光条件下的车辆周围环境对象检测。本公开涉及由视觉控制系统执行的方法,用于在移动车辆的周围环境中的弱光条件下,通过车载式后向和/或侧向的至少一个第一图像采集设备来支持对象检测。视觉控制系统在至少一个第一图像采集设备的支持下采集位于移动车辆后方和/或侧面的周围环境。视觉控制系统进一步确定周围环境中的光照条件。此外,视觉控制系统在光照条件满足光照不充分标准时,在至少一个第一光源的支持下,提供照亮周围环境的地面区域的光输出,以通过至少一个第一图像采集设备促进对象检测。本公开还涉及根据前述内容的视觉控制系统、包括这种视觉控制系统的车辆,以及相应的计算机程序产品和非易失性计算机可读存储介质。失性计算机可读存储介质。失性计算机可读存储介质。
技术研发人员:彼得
受保护的技术使用者:哲内提公司
技术研发日:2021.08.26
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。