1.本发明属于交通工程领域,具体涉及一种空地协同的无人机运行的风险评估方法、装置及系统,尤其适用于民用无人机。
背景技术:
2.随着人工智能、自动驾驶、物联网、5g、北斗等技术快速发展,以及低空空域深入开放,民用无人机使用需求极速增长,物流运输、警务安防、测绘航拍、消防救援等无人机创新应用场景不断涌现,引起了广泛的社会关注。然而,民用无人机在实际运行过程中存在多种安全风险隐患,碰撞、坠机等风险事件时有发生,亟需构建科学有效的运行风险评估方法保障民用无人机安全、有序发展。
3.无人机规章制定联合体(joint authorities for rulemaking of unmanned systems, jarus),于2016年提出了特定运行风险评估方法(specific operations risk assessment, sora)。sora方法中提出了空中风险等级与地面风险等级的概念,但尚未实现对无人机运行风险的量化表征与评估。因此,需要进一步明确民用无人机运行过程中空中与地面的风险表征,建立空地协同的运行风险量化评估方法。
技术实现要素:
4.针对上述问题,本发明提出一种空地协同的无人机运行的风险评估方法、装置及系统,将无人机的时空碰撞概率与碰撞后的产生的地面人员死亡数量结合起来,完成了无人机从发生碰撞到坠地的整个飞行过程的风险评估。
5.为了实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:
6.第一方面,本发明提供了一种空地协同的民用无人机运行的风险评估方法,包括:
7.基于无人机空中飞行过程中的空间碰撞概率模型与时间碰撞概率模型,计算无人机与无人机之间的时空碰撞概率,表征风险可能性;
8.基于地面人员死亡模型,计算无人机碰撞坠地后导致的人员死亡数量,表征风险严重性,所述地面人员死亡模型考虑了无人机落地覆盖面积、地面人口密度、撞击动能和遮蔽因素;
9.基于所述风险可能性和风险严重性,得到无人机运行风险值。
10.可选地,所述空间碰撞概率模型包括垂直碰撞概率模型和水平碰撞概率模型。
11.可选地,所述垂直碰撞概率模型的表达式为:
[0012][0013]
其中:
[0014]
[0015][0016]
z=δh
[0017]
δh=|h-h
′
|
[0018]
式中,p1(z<z
*
)为垂直碰撞概率;为无人机u1高度位置概率密度函数,为无人机u2高度位置概率密度函数,σi是标准差(i=1,2);hi代表该正态分布里的均值,即无人机高度位置的参考值;h为无人机u1的高度位置,h
′
为无人机u2的高度位置;z为两架无人机的垂直高度差;z
*
为给定的垂直间距阈;δh无人机u1与无人机u2的垂直间距。
[0019]
可选地,定义无人机u1位于原点,坐标为(0,0);无人机u2的坐标位置为(x2,y2);碰撞范围是在以原点为圆心,以s
*
为半径的圆域内,s
*
是给定的水平间隔距离阈值;所述水平碰撞概率模型的表达式为:
[0020][0021]
其中:
[0022][0023][0024]
式中,d表示无人机u1与无人机u2的水平距离,(xi,yi)表示无人机所处水平位置的均值,即无人机u2的水平参考位置,m为无人机u1和无人机u2飞行速度的比值,θ为无人机u1与无人机u2在水平方向上的航向差;参数a、b分别代表平行航迹和交叉航迹的水平误差增长率。
[0025]
可选地,所述时间碰撞概率模型的表达式为:
[0026][0027]
式中,k是时间t内的重叠次数,λ是穿越率,表示每小时一架无人机穿过另一架无人机所在区域的次数。
[0028]
可选地,所述时空碰撞概率的计算公式为:
[0029]
p=p1(z<z
*
)p2(d<s
*
)p3(n=k)
[0030]
式中,p表示时空碰撞概率,p1(z<z
*
)表示垂直碰撞概率模型,p2(d<s
*
)表示垂直碰撞概率模型,p3(n=k)表示时间碰撞概率模型。
[0031]
可选地,所述人员死亡数量的计算公式为:
[0032]
s=λ
×
ρ
×aexp
×
p(f)
[0033]
其中:
[0034]
[0035][0036]
式中,s为人员死亡数量,λ为穿越率,ρ为地面人口密度,a
exp
为无人机落地的覆盖面积,p(f)为考虑无人机撞击动能和遮蔽因素得到的致死率,w
ua
、l
ua
、γ分别为无人机的翼展、长度和滑翔角,r
p
、h
p
为平均行人半径和高度;ps为遮蔽因子,ps∈(0, ∞),是在无人机坠落航迹中障碍物个数的函数,取1为平均值;α是指当参数ps=6时的死亡概率为50%的撞击能量参数,β是指当参数ps=0时的导致死亡的撞击能量阈值,e
imp
为无人机撞击动能。
[0037]
可选地,所述无人机运行风险值为风险可能性与风险严重性相乘。
[0038]
第二方面,本发明提供了一种空地协同的民用无人机运行的风险评估装置,包括:
[0039]
风险可能性计算模块,用于基于无人机空中飞行过程中的空间碰撞概率模型与时间碰撞概率模型,计算无人机与无人机之间的时空碰撞概率,表征风险可能性;
[0040]
风险严重性计算模块,用于基于地面人员死亡模型,计算无人机碰撞坠地后导致的人员死亡数量,表征风险严重性,所述地面人员死亡模型考虑了无人机落地覆盖面积、地面人口密度、撞击动能、遮蔽因素;
[0041]
无人机运行风险值计算模块,用于基于所述风险可能性和风险严重性,得到无人机运行风险值。
[0042]
第二方面,一种空地协同的民用无人机运行的风险评估系统,包括:
[0043]
处理器;
[0044]
存储器,其上存储有可在所述处理器上运行的计算机程序;
[0045]
其中,所述计算机程序被所述处理器执行时实现如第一方面中任一项所述的方法。
[0046]
与现有技术相比,本发明的有益效果:
[0047]
本发明将空域范围限定在低空,研究对象聚焦于无人机,主要研究了空地协同的风险评估方法,将无人机的时空碰撞概率与碰撞后的产生的地面人员死亡数量结合起来,完成了无人机从发生碰撞到坠地的整个飞行过程的风险评估。
附图说明
[0048]
为了使本发明的内容更容易被清楚地理解,下面根据具体实施例并结合附图,对本发明作进一步详细的说明,其中:
[0049]
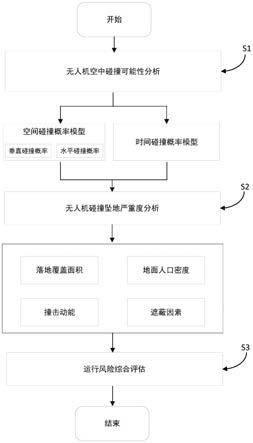
图1为本发明一种实施例的空地协同的民用无人机运行的风险评估方法的整体流程示意图;
[0050]
图2为本发明一种实施例的无人机之间垂直碰撞概率示意图;
[0051]
图3为本发明一种实施例的无人机之间水平碰撞概率示意图;
[0052]
图4为本发明一种实施例的无人机落地滑行距离示意图。
具体实施方式
[0053]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于
限定本发明的保护范围。
[0054]
下面结合附图对本发明的应用原理作详细的描述。
[0055]
实施例1
[0056]
本发明实施例中提供了空地协同的民用无人机运行的风险评估方法,包括以下步骤:
[0057]
基于无人机空中飞行过程中的空间碰撞概率模型与时间碰撞概率模型,计算无人机与无人机之间的时空碰撞概率,表征风险可能性,完成无人机空中碰撞可能性分析;
[0058]
基于地面人员死亡模型,计算无人机碰撞坠地后导致的人员死亡数量,表征风险严重性,所述地面人员死亡模型考虑了无人机落地覆盖面积、地面人口密度、撞击动能和遮蔽因素,完成无人机碰撞坠地严重度分析;
[0059]
基于所述风险可能性和风险严重性,得到无人机运行风险值,完成运行风险综合评估。
[0060]
在本发明实施例的一种具体实施方式中,如图1所示,所述风险评估方法具体包括以下步骤:
[0061]
步骤1:将无人机1(记为无人机u1)和无人机2(记为无人机u2)分别看作质点,在低空空域运行,运行状态包括平行运行和交叉运行,因此也存在两者的航向差θ。
[0062]
步骤2:计算无人机1和无人机2的垂直碰撞概率。
[0063]
步骤2.1将无人机u1的高度看作一个随机变量h,无人机u2高度看作是一个随机变量h
′
。假设无人机u1、无人机u2的高度位置均服从正态分布,则无人机u1、无人机u2的高度位置概率密度函数和分别为:
[0064][0065][0066]
其中,σi是标准差(i=1,2);hi代表该正态分布里的均值,即无人机高度位置的参考值,无人机u1、u2采取的高度位置的均值可相同;h是无人机u1的高度;h
′
是无人机u2的高度。
[0067]
步骤2.2由于无人机u1和无人机u2的高度位置是独立连续分布的随机变量,所以两者的差值也是连续的随机变量z=δh=|h-h
′
|,如图1所示,其概率分布 fz(z)可以通过卷积得到:
[0068][0069]
步骤2.3给定一个垂直间距阈值z
*
,如果z<z
*
,则认为无人机u1与无人机u2发生垂直碰撞,可以得到垂直间距小于阈值p(z<z
*
)的概率:
[0070][0071]
步骤3:计算无人机u1和无人机u2的水平碰撞概率。
[0072]
步骤3.1假设无人机u1位于原点,坐标为(0,0);无人机u2的坐标位置为(x2,y2)。假设无人机u2的水平位置服从二维正态分布,且二维正态分布的均值向量为原点,其概率密度函数为:
[0073][0074]
其中,(xi,yi)表示无人机所处水平位置的均值,即无人机u2的水平参考位置。
[0075]
步骤3.2无人机水平位置可以用几何原理表示,均值和方差分别为:
[0076]
μ=0
[0077][0078]
其中,m为无人机u1和无人机u2飞行速度的比值,θ为无人机u1与无人机u2在水平方向上的航向差;参数a、b分别代表平行航迹和交叉航迹的水平误差增长率。
[0079]
步骤3.3由于无人机u1和无人机u2之间的位置相互独立且服从正态分布,所以两者的相对位置d服从二维正态分布,即两者的组合服从二维正态分布。
[0080]
步骤3.4当两架无人机的水平距离d<s
*
时发生水平碰撞,无人机之间的水平碰撞概率转化为:
[0081][0082]
即碰撞范围是在以坐标原点为圆心,以s
*
为半径的圆域内,如图2所示。其中,s
*
是给定的水平间隔距离阈值。
[0083]
步骤4:计算时间碰撞概率。
[0084]
时间碰撞概率取决于一架无人机占据或穿过另一架无人机所在区域的频率以及花费的时间。因此,每时间间隔t的无人机穿越率或穿越次数n可以使用泊松分布表示,如下所述:
[0085][0086]
其中,k是时间t内的重叠次数,λ定义为穿越率,表示每小时一架无人机穿过另一架无人机所在区域的次数,穿越率用每小时的平均穿越次数表示。
[0087]
步骤5:计算时空碰撞率,表征风险可能性。
[0088]
将上述的空间碰撞概率和时间碰撞概率相结合得到时空碰撞概率。假设飞行器的垂直位置和水平位置是相互独立的,并且目标空域中存在单独的无人机u1和无人机u2,时空碰撞概率为:
[0089]
p=p1(z<z
*
)p2(d<s
*
)p3(n=k)
[0090]
该式即为无人机与无人机在指定空域的碰撞概率(用每飞行小时碰撞次数表示)。
[0091]
步骤6:计算无人机碰撞坠地后导致的人员死亡数量,表征风险严重性。
[0092]
碰撞产生的严重程度用无人机坠落后对地面人员的死亡人数来衡量。在该模型中,因要确定无人机撞击区域大小,不能再将其看作一个质点,而是引入无人机自身具体的参数来量化落地覆盖面积。假设地面人口密度均匀分布,无人机以γ角向地面滑行。无人机
达到了行人的平均高度,当它继续滑向地面时,落地覆盖面积与它的长度和翼展有关。根据该模型,无人机落地的覆盖面积为:
[0093][0094]
其中,w
ua
、l
ua
、γ分别为无人机的翼展、长度和滑翔角,r
p
、h
p
为平均行人半径和高度,如图3所示。
[0095]
除此之外,还考虑无人机撞击动能和遮蔽因素,得到致死率:
[0096][0097]
其中,遮蔽因子ps∈(0, ∞)是在无人机坠毁航迹中障碍物个数的函数,取1为平均值;α参数是指当参数ps=6时的死亡概率为50%的撞击能量参数,β是指当参数ps=0时的导致死亡的撞击能量阈值。e
imp
为无人机撞击动能。那么,在一个大范围内,我们可以通过简单地将其乘以平均坠机频率λ和地面人口密度得到每飞行小时的预期死亡人数:
[0098][0099]
步骤7.计算风险值进行风险评估。
[0100]
将无人机u1和无人机u2的碰撞可能性(单位时间内的碰撞次数)乘以碰撞坠地产生后果的碰撞严重性(每飞行小时碰撞后坠机的地面死亡人数)得到最终的风险值。具体公式为:
[0101]
r=p
×
s。
[0102]
实施例2
[0103]
基于与实施例1相同的发明构思,本发明实施例中提供了一种空地协同的民用无人机运行的风险评估装置,包括:
[0104]
风险可能性计算模块,用于基于无人机空中飞行过程中的空间碰撞概率模型与时间碰撞概率模型,计算无人机与无人机之间的时空碰撞概率,表征风险可能性;
[0105]
风险严重性计算模块,用于基于地面人员死亡模型,计算无人机碰撞坠地后导致的人员死亡数量,表征风险严重性,所述地面人员死亡模型考虑了无人机落地覆盖面积、地面人口密度、撞击动能、遮蔽因素;
[0106]
无人机运行风险值计算模块,用于基于所述风险可能性和风险严重性,得到无人机运行风险值。
[0107]
其余部分均与实施例1相同。
[0108]
实施例3
[0109]
基于与实施例1相同的发明构思,本发明实施例中提供了一种空地协同的民用无人机运行的风险评估系统,包括:
[0110]
处理器;
[0111]
存储器,其上存储有可在所述处理器上运行的计算机程序;
[0112]
其中,所述计算机程序被所述处理器执行时实现如实施例1中任一项所述的方法。
[0113]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。