1.本发明涉及船舶轨迹预测领域,具体涉及一种基于线性与非线性滤波器组合的船舶航迹实时预报方法。
背景技术:
2.近年来,随着计算机技术的发展,水炮打击系统从人工控制向智能化控制方向发展,智能水炮根据打击目标的位置自动调整其打击角度,现阶段智能水炮多应用于消防和执法。当智能水炮应用于消防时,由于火源的位置不会发生改变,因此其实现的功能是对静止目标的打击,射流在空中的运动时常不会对打击效果产生影响;当智能水炮应用于执法时,目标船舶躲避打击时处于运动状态,射流在空中运动所耗时间,会导致打击脱靶,打击落点始终落后于目标位置,需要通过计算提前量对打击点进行修正。因此,对目标船舶轨迹进行实时预测是提高智能水炮打击精度的关键步骤,智能水炮根据预测模型预测目标位置,计算打击提前量,解决打击脱靶问题。
3.现有的目标估计预测方法可分为基于统计学的方法和基于深度学习的方法。但是有些预测方法需要大量数据,数据量少时预测的效果一般,并且有些模型的建立需要用到较多的船舶固有参数及外界环境参数,没有很好的泛化性。或者是结合cnn与lstm网络各自的优点建立短期航迹预测模型,相较于传统的数学统计方法在特定的环境中拥有更好的效果,但需要较大规模的训练集。或者是依赖于双目视觉测距建立实时性较强的船舶轨迹预测模型,但是成本较高。或者是使用基于多项式卡尔曼滤波模型,对船舶ais数据建模,但其没有考虑带有大量噪声的实时跟踪数据的处理。
技术实现要素:
4.本发明针对上述问题,提出一种基于线性与非线性滤波器组合的船舶航迹实时预报方法,用来预测目标船舶的未来轨迹。根据短期内的历史轨迹数据,实时更新组合滤波预测模型,实现成本低,且不需要智能水炮设备所在的船舶固有参数与外界环境参数,泛化性能好。
5.本发明提供了一种基于线性与非线性滤波器组合的船舶航迹实时预报方法,包括:s1,采集目标历史轨迹作为数据集,并进行数据预处理,得到去除噪声的数据集;s2,使用n阶多项式拟合对数据集进行拟合,得到n 1个用于预测的多项式,使用k折交叉验证在n 1个预测多项式中选取最优预测曲线,得到初步预测结果;s3,使用中值滤波处理预测结果,得到去除非线性噪声的预测结果。
6.进一步的,步骤s1具体包括:s11,使用智能水炮系统对目标船舶进行跟踪,采集其中偏航角和俯仰角信息用于描述目标轨迹;s12,采集数据的噪声为随机变量x,其中,x服从一维高斯分布,概率密度函数为其中,μ为随机变量x的期望值,σ为x的标准差;s13,将所述概率密度函数作为计算高斯模板的高斯函数g(x)原型,将其期望值μ
设置为当前模板卷积元素的值x0为,则高斯模板其中,x为x0领域元素的值,若一维高斯模板宽度为n,则高斯模板使用高斯模板遍历采集数据,进行卷积,得到滤波结果
7.对采集的数据中出现的大量噪声进行高斯滤波,为线性滤波,高斯函数标准差σ越大,滤波后的平滑程度越好,通过调节σ,可以得到良好的平滑效果。
8.进一步的,步骤s2中使用n阶多项式拟合对数据集进行拟合,具体包括:对样本集使用最小二乘法拟合得到0~n阶多项式其中n为多项式最高阶数,t为时间,b为偏置常量,a为多项式系数,m为阶数。
9.m不同的预测曲线预测效果不同,m过大会出现过拟合问题,m太小会出现欠拟合问题。因此,需要规范阶数m,得到合适的m值。
10.进一步的,步骤s2中使用k折交叉验证在n 1个预测多项式中选取最优预测曲线,具体包括:s21,把样本集s等间隔抽样分成k份,分别使用其中的(k-1)份作为训练集计算f(m,t),一份作为交叉验证集,s22,计算验证集上预测值与真实值之间的误差值e=(p-r)2,取误差值e的平均值最小的f(m,t)为最优预测曲线,其中,m为k折交叉验证规范阶数,p为预测值,r为真实值;s23,若有多个误差值e的均值相同的f(m,t),则取其中阶数m最小的f(m,t)为最优预测曲线。
11.k折交叉验证适用于数据集较小的场景,能有效防止过拟合和欠拟合,找到合适的模型参数,使用k折交叉验证规范阶数m。
12.进一步的,步骤s3具体包括:s31,使用最优预测曲线计算预测时间点邻域内的多个预测结果,得到预测结果的集合;s32,使用中值滤波过滤预测结果中的非线性噪声,得到最终预测结果。
13.进一步的,还包括基于若干目标轨迹数据拟合得到线性滤波和非线性滤波参数值的预设参数,所述预设参数包括高斯函数标准差σ,高斯模板宽度n,多项式最高阶数d,样本份数k,以及,中值滤波的样本数据l。
14.进一步的,还包括基于均方误差mse定量评价预测结果。
15.本发明的有益技术效果如下:
16.1、先通过线性滤波器处理高斯噪声和预测目标轨迹,再使用非线性滤波器处理预测结果中的非线性噪声,使预测曲线没有明显的非线性噪声且有良好的平滑度。
17.2、预测轨迹和原始轨迹的重合度好,采用线性与非线性滤波器组合的船舶轨迹实
时预报防范,在打击运动目标时既可以集中静止目标,也可以准确击中运动目标。
18.3、能根据短期内的历史轨迹数据,实时更新组合滤波预测模型,实现成本低,且不需要智能水炮设备所在的船舶固有参数与外界环境参数,泛化性能好。
附图说明
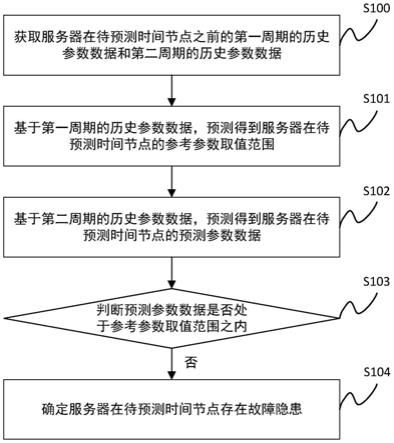
19.图1为本发明基于线性与非线性滤波器组合的船舶航迹实时预报方法实施例的流程示意图;
20.图2为本发明实施例的原始数据卷积滤波示意图;
21.图3为本发明实施例中的中值滤波流程示意图;
22.图4为本发明实施例中的目标轨迹分解图;
23.图5为本发明实施例中的偏航轨迹样本示意图;
24.图6为线性滤波预测效果图;
25.图7为本发明实施例中基于线性与非线性滤波器组合的船舶航迹实时预报方法预测效果图;
26.图8为本发明实施例中目标轨迹示意图;
具体实施方式
27.为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
28.如图1所示,本发明的目的在于提出了基于线性与非线性滤波器组合的船舶航迹实时预报方法的流程示意图,线性滤波算法分为高斯滤波和n阶多项式拟合,非线性滤波算法采用中值滤波。首先使用高斯滤波平滑历史轨迹数据,过滤数据集中的高斯噪声,之后使用n阶多项式拟合计算预测曲线集合,用于计算预测值,接着使用k折交叉验证算法评估预测效果,根据评估效果确定预测曲线,最后使用中值滤波过滤通过预测曲线预测出的结果序列中的非线性的噪声,得到有效预测值。在本发明的示出实施例中,对本发明方法步骤逐一描述。
29.s1,采集目标历史轨迹作为数据集,并进行数据预处理,得到去除噪声的数据集。
30.使用智能水炮系统对目标船舶进行跟踪,根据其中偏航角和俯仰角信息描述目标所处位置。由于设备负载船只的横摇以及水雾遮挡等原因,在采集目标位置信息的过程中,将会出现大量噪声,需要使用高斯滤波对数据进行预处理。设噪声为随机变量x,经实验发现x基本服从一维高斯分布,其概率密度函数p(x)如式(1)所示。
[0031][0032]
其中μ为随机变量x的期望值,σ为x的标准差。
[0033]
高斯滤波为线性滤波方法,使用式(1)作为计算高斯模板的高斯函数g(x)原型,将其期望值设置为当前模板卷积元素的值,设μ=x0,x0为当前模板卷积的元素,则高斯模板g(x)如式(2)所示。
[0034][0035]
其中x为x0领域元素的值。高斯函数标准差σ越大,滤波后的平滑程度越好,通过调节σ,可以得到良好的平滑效果。
[0036]
设一维高斯模板宽度为n,则高斯模板g(x1,x2,λ,xn)如式(3)所示。
[0037][0038]
使用高斯模板对数据进行滤波,如图2所示,x为原始数据,y为滤波结果。使用高斯模板从左至右遍历原始数据,并进行卷积,得到滤波结果y。其中,原始数据x卷积得到滤波结果y的方法如式(4)所示。
[0039][0040]
s2,使用n阶多项式拟合对数据集进行拟合,得到n 1个用于预测的多项式,使用k折交叉验证在n 1个预测多项式中选取最优预测曲线,得到初步预测结果。
[0041]
多项式拟合是线性滤波方法,多项式可以逼近任意可导自变量与因变量之间的映射关系,因此可以用于预测船舶轨迹。设多项式最高阶数为n,数据预处理结果的集合为样本集s,对样本集使用最小二乘法拟合得到0~n阶多项式f(m,t),如式(5)所示。
[0042][0043]
其中t为时间,b为偏置常量,a为多项式系数,m为阶数。m不同的预测曲线预测效果不同,m过大会出现过拟合问题,m太小会出现欠拟合问题。因此,需要规范阶数m,得到合适的m值。
[0044]
k折交叉验证适用于数据集较小的场景,能有效防止过拟合和欠拟合,找到合适的模型参数。本文使用k折交叉验证规范阶数m。
[0045]
把样本集s等间隔抽样分成k份,分别使用其中的(k-1)份作为训练集计算f(m,t),剩下的1份作为交叉验证集,最后取平均误差,用于评估f(m,t)的预测效果,预测值与真实值之间的误差计算方法如式(6)所示。
[0046]
e=(p-r)2ꢀꢀꢀ
(6)
[0047]
其中e为误差值,p为预测值,r为真实值。e值越大误差越大,计算验证集上所有误差,最后取e的平均值最小的f(m,t)为最优预测曲线。
[0048]
在一些实施方式中,若有多个e的均值相同的f(m,t),则取其中阶数m最小的f(m,t)为最优预测曲线。
[0049]
s3,使用中值滤波处理预测结果,得到去除非线性噪声的预测结果。
[0050]
如图3所示,为使用中值滤波算法的流程图,在采集的目标轨迹信息中,预处理过程中的高斯滤波方法只能处理线性噪声,但在预处理后的数据集中,还存在因目标短暂丢失等原因产生的非线性噪声。这些噪声会被预测过程缩放,从而在预测结果集合中存在非线性噪声,绘制出的结果曲线中存在尖刺状的突起,需要对结果集中的非线性噪声进行过滤。中值滤波是非线性滤波器,通过对输入数据元素集合排序,将数据的中值作为滤波结果,能够有效过滤非线性的噪声数据。其中z为预测值的集合,l为一次中值滤波的数据集长度,z(l/2)为预测值。
[0051]
在本发明的一些实施方式中,还包括基于若干目标轨迹数据拟合得到线性滤波和非线性滤波参数值的预设参数。
[0052]
在本发明的一个实施例子中,智能水炮系统以10hz的速率采集目标位置信息,该系统需要预测时间段[t,t 2]以内的目标轨迹,t为当前时间。采用参数具体如下:高斯函数标准差σ=1.5,高斯模板宽度n=20;根据多次目标轨迹数据拟合结果,设置多项式拟合曲线最高阶数d=6,交叉验证每次使用的样本份数k=3;中值滤波每次使用的样本数量l=10。
[0053]
在本发明的一些实施方式中,还包括基于均方误差mse定量评价预测结果。
[0054]
为了定量评估本发明的实施例,采用均方误差mse(mean square error)评价预测效果,如式(7)所示。
[0055][0056]
其中为预测值,yi为真实值。mse越小,预测值越接近真实值,预测结果越准确。
[0057]
本发明一个实施例中,将本发明的基于线性与非线性滤波器组合的船舶航迹实时预报方法应用于智能水炮系统上进行试验,目标使用遥控模型船。智能水炮系统中,目标运动可以分解为水平和垂直方向上的运动,如图4所示,p点为目标船舶当前位置,x方向为偏航方向,y方向为俯仰方向。实验中,采集智能水炮系统偏航角数值描述目标水平方向位置,俯仰角描述目标垂直方向位置。
[0058]
以偏航方向为例,对目标偏航方向轨迹进行预测实验。采集约800条光电偏航方向数据绘制matlab图如图5所示,水平轴为数据采集时间,竖直轴为偏航角,得到偏航轨迹样本。并将采集得到的样本使用线性滤波预测,和本发明实施例中的基于线性与非线性滤波器组合的船舶航迹实时预报方法进行对比,效果如图7所示。其中图6为线性滤波预测效果图,图7为基于线性与非线性滤波器组合的船舶航迹实时预报方法的预测效果图。可以看出仅使用线性滤波预测无法有效处理非线性的噪声,而使用组合滤波预测的曲线没有明显的非线性噪声且有良好的平滑度。
[0059]
计算多次偏航方向的mse,采用线性滤波预测方法的mse区间为1.2165~3.0027,而采用本发明的基于线性与非线性滤波器组合的船舶航迹实时预报方法的mse区间为0.3025~1.4832,加入了非线性滤波器的组合滤波在预测效果上明显高于仅使用线性滤波的预测方法。
[0060]
使用与水平方向相同的模型对俯仰方向的轨迹进行预测,并将偏航与俯仰方向的预测结果展示到视频帧中,效果如图8所示,其中矩形框为智能水炮跟踪框,曲线a为原始轨迹曲线,曲线b为使用本发明的基于线性与非线性滤波器组合的船舶航迹实时预报方法得
到的预测曲线。使用等间隔采样方法在曲线a与曲线b中分别采集100个样本点计算重合度用于直观反映预测效果,设样本集合为a,预测点与真实点之间的合理像素距离误差为10,若曲线a样本点与所对应曲线b样本点的直线距离在合理误差范围内,则判定预测正确,否则判定预测错误。设样本集合a中预测正确的样本点个数为y,预测错误的样本点个数为n,则重合度=y/(y n)。经计算预测轨迹与原始轨迹重合度为88.71%,预测轨迹基本贴合原始轨迹。
[0061]
本发明提出的基于线性与非线性滤波器组合的船舶航迹实时预报方法,先通过线性滤波器处理高斯噪声和预测目标轨迹,再使用非线性滤波器处理预测结果中的非线性噪声。有效的解决了工程中射流装置打击运动目标时的打击滞后问题,根据历史轨迹信息和预测时间,实时预测目标位置。为目标锁定方法提供有效的目标位置信息。
[0062]
以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。