用于机器人的rv减速器
技术领域
1.本发明涉及一种用于机器人的rv减速器,尤其涉及运用摆线轮修形技术解决精度保持性等动态性能缺陷的精密减速器。
背景技术:
2.精密减速器传动技术是从通用摆线针轮传动技术基础上发展起来的一种新型传动技术,精密减速器具有体积小、重量轻、传动比范围广、传动效率高等优点,广泛应用于机器人、数控机床、半导体设备、精密包装设备、焊接变位机、等离子切割、烟草机械、印刷机械、纺织机械、医疗器械等民用领域和跟踪天线、导弹发射架、卫星、雷达等军工领域。精密减速器是机器人最核心的部件之一,被国家列为80种左右急需国产化的标志性核心基础零部件之一,曾多次列入国家863科技计划项目。
3.精密减速器最为核心的技术是摆线轮的修形技术。为实现精密传动,需补偿制造误差、便于装拆和保证润滑,故摆线轮不能采用标准齿形,摆线轮齿与针销之间必须要有啮合侧隙和径向间隙,因此必须修形。但摆线轮的修形又会影响精密减速器的传动转矩、传动精度和传动效率等。目前,国内外的用于机器人的rv减速器大多采用日本纳博特斯克公司研制的技术。国内对于该理论和技术研究从零开始,进展缓慢,严重滞后,已研究30多年,但仍未解决摆线轮的修形技术难题,仍存在精度保持性等动态性能差的问题。
4.因此,摆线轮在实际工程应用中,并不是采用标准齿形曲线作为齿廓曲线,原因是按照标准齿形加工出来的摆线轮将难以装配,且在工作过程中摩擦发热会导致摆线轮和针齿的膨胀、卡死。而通过对摆线轮进行修形,使摆线轮与针齿之间产生合理的啮合间隙和径向间隙,以满足rv减速器的良好运行。
5.通用摆线针轮传动技术领域的摆线轮修形方式多达几十种,有等距修形、移距修形、转角修形,以及等距-移距-转角等多种组合修形;有非等距、非移距修形,如椭圆修形、抛物线修形、压力角修形、复合修形、分段修形、二阶对数修形、指数修形、齿厚修形、齿高修形等,以及偏心距-等距-移距、齿厚-等距-移距、齿高-等距-移距等多种组合修形。上述通用摆线针轮传动技术领域的摆线轮修形技术已在精密减速器技术领域应用的有3种,即摆线轮的“等距-移距”中的“正等距-正移距”、“正等距-负移距”、“负等距-负移距”3种修形技术方案。但上述3种修形技术方案均未能完全解决精密减速器技术领域的精度、温升、磨损、振动、噪音等问题,精密减速器仍存在着精度保持性等动态性能差的问题。
6.其中,“负等距-负移距”的修行方式由大连交通大学的李立行、何卫东教授率先进行研究,并被国内理论界所认可,在教科书和工具书中广泛普及应用。国内企业界的用于机器人的rv减速器摆线轮修形也都是采用“负等距-负移距”组合修形理论,并在“负等距-负移距”组合修形理论的基础上,进行了大量的等距和移距修形量的技术研究和实践。至今国内企业已经研究30多年,但技术始终未能得到突破,产品质量始终未能达到日本纳博特斯克公司的技术水平,始终存在着精度保持性差的问题。存在这些问题,目前国内理论界和企业界普遍认为是国内的材料和热处理工艺未能达到日本纳博特斯克公司的水平所致。
7.由此可见,能否基于现有技术中的不足,提供一种改进的用于机器人的rv减速器,有效解决用于机器人的rv减速器的静态和动态性能问题,实现质量稳定、良品率高、节约成本,成为本领域技术人员亟待解决的技术难题。
技术实现要素:
8.发明所要解决的课题
9.本发明的目的是在于克服现有技术的缺陷,提供一种改进的用于机器人的rv减速器。发明人经过十多年的理论研究和实践证明,发现目前国内的“负等距-负移距”组合修形理论及技术仅能解决用于机器人的rv减速器的静态性能问题,不能解决动态性能问题,因为采用“负等距-负移距”组合修形,虽然保证了用于机器人的rv减速器的精度要求,但是牺牲了啮合侧隙和径向间隙,不能满足用于机器人的rv减速器做功时的热膨胀所需的空间要求,故存在动态性能差的问题。因此,发明人提出了“负等距-正移距组合修形理论 修形量 消隙原理 相位差消隙量”的组合技术方案,并在“负等距-正移距”组合修形理论和技术的基础上,进行了大量的等距和移距修形量的研究,和大量的消隙量的研究,获得了重大的理论和技术的突破,根据本发明所提供的改进的用于机器人的rv减速器,有效解决了用于机器人的rv减速器的静态和动态性能问题。
10.用于解决课题的方法
11.本发明第一方面涉及一种用于机器人的rv减速器,
12.包括针齿壳,在针齿壳中设置有第一级减速部件和第二级减速部件,
13.第一级减速部件包括输入轴、太阳轮及行星轮,
14.第二级减速部件包括摆线轮、针销、左刚性盘、右刚性盘、轴承、多个偏心轴,
15.摆线轮包括左摆线轮与右摆线轮,对摆线轮进行修形,使得摆线轮的齿槽与针销之间形成啮合侧隙δc和径向间隙δj,
16.摆线轮采用“负等距-正移距”组合修形,修形后的啮合侧隙δc为0.000014d0~0.00124d0,径向间隙δj为0.000007d0~0.00062d0,d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm,偏心轴的两个偏心段的相位差θ为179
°
≤θ<179.81
°
或180.19
°
<θ≤181
°
。
17.优选地,啮合侧隙δc为0.000035d0~0.000992d0。
18.优选地,径向间隙δj为0.000018d0~0.000496d0。
19.优选地,rv减速器在额定扭矩下做功时,摆线轮的温升δt为5℃~45℃。
20.优选地,rv减速器在额定扭矩下做功时,摆线轮的热膨胀量λ为0.00007d0≤λ≤0.00062d0。
21.本发明第二方面涉及一种用于机器人的rv减速器,
22.包括针齿壳,在针齿壳中设置有第一级减速部件和第二级减速部件,
23.第一级减速部件包括伺服电机上的主动轮、双联齿轮及行星轮,
24.第二级减速部件包括摆线轮、针销、左刚性盘、右刚性盘、轴承、多个偏心轴,
25.摆线轮包括左摆线轮与右摆线轮,对摆线轮进行修形,使得摆线轮的齿槽与针销之间形成啮合侧隙δc和径向间隙δj,
26.摆线轮采用“负等距-正移距”组合修形,修形后的啮合侧隙δc为0.000014d0~
0.00124d0,径向间隙δj为0.000007d0~0.00062d0,d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm,偏心轴的两个偏心段的相位差θ为179
°
≤θ<179.81
°
或180.19
°
<θ≤181
°
。
27.优选地,啮合侧隙δc为0.000035d0~0.000992d0。
28.优选地,径向间隙δj为0.000018d0~0.000496d0。
29.优选地,rv减速器在额定扭矩下做功时,摆线轮的温升δt为5℃~45℃。
30.优选地,rv减速器在额定扭矩下做功时,摆线轮的热膨胀量λ为0.00007d0≤λ≤0.00062d0。
31.发明的效果
32.根据本发明第一方面和第二方面所涉及的用于机器人的rv减速器,有效解决了用于机器人的rv减速器的静态和动态性能问题,实现了质量稳定、良品率高、节约成本。
附图说明
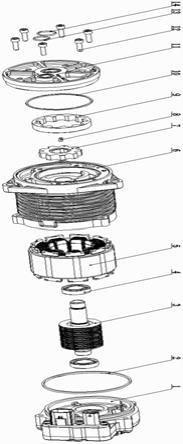
33.图1为本发明的第一实施方式的用于机器人的rv减速器的示意图。
34.图2为本发明的第二实施方式的用于机器人的rv减速器的示意图。
具体实施方式
35.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
37.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
38.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
39.图1为本发明的第一实施方式的用于机器人的rv减速器的示意图。该用于机器人的rv减速器是一种精密减速器,包括针齿壳1,在针齿壳1中设置有第一级减速部件和第二级减速部件,第一级减速部件包括:输入轴9、与输入轴9的一端固定连接的太阳轮14、及与太阳轮14啮合的2或3个均匀分布的行星轮15,第二级减速部件包括:偏心轴6、摆线轮、针销4、左刚性盘13、右刚性盘12、轴承,2或3个偏心轴6环绕输入轴9均匀分布(在本实施方式中偏心轴6为2或3个,但是并不限于此,也可以为4个或更多),偏心轴6的轴伸端连接行星轮15,偏心轴6的两个偏心段上设有用以支承摆线轮的第一轴承8,偏心段的两侧轴伸端用第二轴承7分别支承在左刚性盘13和右刚性盘12周边孔中,左刚性盘13和右刚性盘12用第三轴承2分别支承在针齿壳1的两侧内孔,输入轴9用第四轴承10支承在左刚性盘13和右刚性盘12中心孔,左刚性盘13上均匀分布有2或3个凸缘,穿过摆线轮上均匀分布的2或3个贯穿
孔(在本实施方式中凸缘和贯穿孔为2或3个,但是并不限于此,也可以为4个或更多),与右刚性盘12用螺钉及定位销连接成刚性体。摆线轮包括左摆线轮3与右摆线轮5,对摆线轮进行修形使摆线轮的齿槽与针销4之间形成啮合侧隙δc和径向间隙δj,这种修形方式称为“等距-移距”组合修形。
40.摆线轮采用“负等距-正移距”组合修形,修形后摆线轮的齿槽与针销4之间的啮合侧隙δc=(0.00014~0.00124)d0(mm),径向间隙δj=(0.000007~0.00062)d0(mm),d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm,偏心轴6的两个偏心段的相位差θ为179
°
≤θ<179.81
°
或180.19
°
<θ≤181
°
。通过设置相位差,利用齿轮消隙原理减少回差。
41.啮合侧隙δc是反映摆线轮与针销4啮合工作状态的工作参数,是决定减速器精度的重要因素。但在现有技术中,为确保减速器精度,只能采用“负等距-负移距”组合修形,致使其啮合侧隙δc很小,不能保有摆线轮的热膨胀空间,故动态性能差。径向间隙δj是反映摆线轮与针销4啮合位置状态的装配参数,需确保在热膨胀情况下的不接触性。但在现有技术中,为确保减速器精度被迫牺牲径向间隙δj。本发明克服了这些现有的技术偏见,摆线轮采用“负等距-正移距”组合修形,修形后摆线轮齿槽与针销之间的啮合侧隙δc和径向间隙δj,远大于“负等距-负移距”组合修形的修形量,有效解决了用于机器人的rv减速器的静态和动态性能问题。砂轮圆弧半径加大为负等距,减小为正等距;砂轮向工作台中心移进为负移距,移出为正移距。
42.在第一实施方式的一个较佳实施例中,优选为,摆线轮采用“负等距-正移距”组合修形,摆线轮的齿槽与针销4之间的啮合侧隙δc=(0.000035~0.000992)d0(mm),进一步优选为δc=(0.000049~0.00062)d0(mm),d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm。
43.在第一实施方式的一个较佳实施例中,优选为,摆线轮采用“负等距-正移距”组合修形,摆线轮的齿槽与针销4之间的径向间隙δj=(0.000018~0.000496)d0(mm),进一步优选为δj=(0.000025~0.00031)d0(mm),d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm。
44.在第一实施方式的一个较佳实施例中,优选为,摆线轮采用“负等距-正移距”组合修形,偏心轴6的两个偏心段的相位差θ为θ=179.81
°
或θ=180.19
°
,以利用齿轮消隙原理减少回差。
45.在第一实施方式的一个较佳实施例中,优选为,rv减速器在额定扭矩下做功时,摆线轮的温升δt=5~45(℃)。摆线轮的温升δt是指摆线轮与针齿壳1的温度之差。实际热膨胀量可以通过对摆线轮的实际检测或相对检测所得到。
46.在第一实施方式的一个较佳实施例中,优选为,rv减速器在额定扭矩下做功时,摆线轮的热膨胀量λ为0.00007d0≤λ≤0.00062d0(mm)。_
47.精密减速器传动运转过程中,除需考虑部件间必要的运转间隙外,更重要的是必须满足部件间因温差、材料差别等因素所造成的热膨胀量对其空间的要求,因为部件间的热膨胀量所需的空间大于部件间正常运转所需的空间要求。
48.根据《固体物理导论》(基泰尔c[美],北京:科学出版社,1979)的准谐振近似理论,热膨胀的机理是,固体由微小晶体组成,晶体是由原子在空间按一定的位置排列而成,原子间既有位能,也有动能,原子平衡时,其动能与位能之和为最小,随着温度的升高,原子的动
能增大,促使原子间位移变大,位能升高,宏观表现为热膨胀的发生,热膨胀可以看作是物体受到均匀的向外膨胀力。根据《机器人用摆线针轮行星齿轮传动装置通用技术条件》国家标准gb/t 36491-2018规定,减速器壳体最高温度应不大于60℃,使用环境条件在-10~40℃。摆线轮温升的具体数值可以通过减速器壳体与摆线轮温差测量得出,也可以按经验取值5~45℃。
[0049]
摆线轮的实际结构是多孔圆盘形结构,与理论实测样本的实心圆棒形结构有所不同,故摆线轮的实际热膨胀量将低于理论轴承钢材料热膨胀量。为获取正确的啮合侧隙δc和径向间隙δj,可以通过现有技术手段测得摆线轮实际的热膨胀量或热膨胀系数、温升的数据,与理论的热膨胀数据比对,并通过热膨胀量乘以一定的系数予以调节,从而获得实际热膨胀量λ及所需的啮合侧隙δc和径向间隙δj的参数。所取的热膨胀量、热膨胀系数、温度及所乘以的系数并不限于说明书中记载的情况,可以根据实际情况适当调整。本领域普通技术人员,尽管所取的热膨胀量、热膨胀系数、温度及所乘以的系数与本专利有所对应的参数不同,但其最终的啮合侧隙δc和径向间隙δj取值落在本发明的权利要求之内的,仍包括在本权利保护范围内。
[0050]
为详细说明减速器在“负等距-正移距”组合修形下的不同啮合侧隙δc、径向间隙δj、相位差θ时的运行情况,以下述根据第一实施方式制造的减速器为例,具体检测数据列表如下:
[0051][0052][0053]
由上表可知,从实际检测的角度更加直观的显示出根据第一实施方式制造的减速器达到了国家标准。
[0054]
图2为本发明的第二实施方式的用于机器人的rv减速器的示意图。该用于机器人的rv减速器是一种精密减速器,包括针齿壳101,在针齿壳101中设置有第一级减速部件和第二级减速部件,第一级减速部件包括:伺服电机上的主动轮1301、双联齿轮801及2或3个均匀分布的行星轮1201,双联齿轮801包括从动轮601与太阳轮701,从动轮601与主动轮1301啮合,太阳轮701与行星轮1201啮合,行星轮1201连接在第二级减速部件中的偏心轴1101的轴伸端,在双联齿轮8的内孔设置通线管,双联齿轮801的两侧用第一轴承1001、第二
轴承901分别支承在右刚性盘501与机器人本体相应位置上,第二级减速部件包括:均匀分布的偏心轴1101、摆线轮、针销1701、左刚性盘1601、右刚性盘501、轴承,2或3个偏心轴1101环绕左刚性盘1601和右刚性盘501的中心孔均匀分布(在本实施方式中偏心轴1101为2或3个,但是并不限于此,也可以为4个或更多),在偏心轴1101的两个偏心段上设有用以支承摆线轮的偏心轴轴承1501,偏心段两侧的轴伸用圆锥滚子轴承1401分别支承在左刚性盘1601和右刚性盘501的周边孔中,左刚性盘1601和右刚性盘501用主轴承201分别支承在针齿壳101两侧内孔,在左刚性盘1601上均匀分布的2或3个凸缘穿过摆线轮上相应的贯穿孔与右刚性盘501用螺钉与定位销连接成刚性体(在本实施方式中凸缘和贯穿孔为2或3个,但是并不限于此,也可以为4个或更多)。摆线轮包括左摆线轮301与右摆线轮401,采用“等距-移距”组合修形,修形使摆线轮的齿槽与针销1701之间形成啮合侧隙δc和径向间隙δj。
[0055]
摆线轮采用“负等距-正移距”组合修形,修形后摆线轮的齿槽与针销1701之间的啮合侧隙δc=(0.000014~0.00124)d0(mm),径向间隙δj=(0.000007~0.00062)d0(mm),d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm,偏心轴1101的两个偏心段的相位差θ为179
°
≤θ<179.81
°
或180.19
°
<θ≤181
°
,即利用齿轮消隙原理减少回差。
[0056]
啮合侧隙δc是反映摆线轮与针销1701啮合工作状态的工作参数,是决定减速器精度的重要因素。但在现有技术中,为确保减速器精度,只能采用“负等距-负移距”组合修形,致使其啮合侧隙δc很小,不能保有摆线轮的热膨胀空间,故动态性能差。径向间隙δj是反映摆线轮与针销1701啮合位置状态的装配参数,需确保在热膨胀情况下的不接触性。但在现有技术中,为确保减速器精度被迫牺牲径向间隙δj。本发明克服了这些现有的技术偏见,摆线轮采用“负等距-正移距”组合修形,修形后摆线轮齿槽与针销之间的啮合侧隙δc和径向间隙δj,远大于“负等距-负移距”的修形量,有效解决了用于机器人的rv减速器的静态和动态性能问题。
[0057]
在第二实施方式的一个较佳实施例中,优选为,摆线轮采用“负等距-正移距”组合修形,摆线轮的齿槽与针销1701之间的啮合侧隙δc=(0.000035~0.000992)d0(mm),进一步优选为δc=(0.000049~0.00062)d0(mm),d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm。
[0058]
在第二实施方式的一个较佳实施例中,优选为,摆线轮采用“负等距-正移距”组合修形,摆线轮的齿槽与针销401之间的径向间隙δj=(0.000018~0.000496)d0(mm),进一步优选为δj=(0.000025~0.00031)d0(mm),d0为摆线轮的齿顶圆与齿根圆的平均直径且单位为mm。
[0059]
在第二实施方式的一个较佳实施例中,优选为,摆线轮采用“负等距-正移距”组合修形,偏心轴1101的两个偏心段的相位差θ为θ=179.81
°
或θ=180.19
°
,以利用齿轮消隙原理减少回差。
[0060]
在第二实施方式的一个较佳实施例中,优选为,rv减速器在额定扭矩下做功时,摆线轮的温升δt=5~45(℃)。摆线轮的温升δt是指摆线轮与针齿壳1的温度之差。实际热膨胀量可以通过对摆线轮的实际检测或相对检测所得到。当实际热膨胀量难以准确检测时,可以用理论热膨胀量代替实际热膨胀量。
[0061]
在第二实施方式的一个较佳实施例中,优选为,rv减速器在额定扭矩下做功时,摆线轮的轴承钢热膨胀系数α=1.379
·
10-5
(1/℃),摆线轮的温升δt,摆线轮的齿顶圆与齿
根圆平均直径为d0时的理论热膨胀量的计算式为λ=α
·
δt
·
d0(mm)。
[0062]
在第二实施方式的一个较佳实施例中,优选为,rv减速器在额定扭矩下做功时,摆线轮的热膨胀量λ为0.00007d0≤λ≤0.00062d0。
[0063]
采用了第一实施方式和第二实施方式的用于机器人的rv减速器,与以往的现有工艺相比,有效解决用于机器人的rv减速器的静态和动态性能问题,实现质量稳定、良品率高、节约成本。
[0064]
具体来说,获得了如下有益效果:
[0065]
(1)本发明采用的“负等距-正移距”组合修形逼近共轭齿形,具有足够的啮合齿数和合理的啮合侧隙δc、径向间隙δj,承载力大,传动平稳,噪音低,振动小。
[0066]
(2)本发明采用的“负等距-正移距”组合修形产生的啮合侧隙δc、径向间隙δj,与摆线轮的齿顶圆与齿根圆平均直径d0和热膨胀量λ密切相关,因而具有良好的动态特性,在额定载荷下运转做功时温升低,磨损小,同时装配容易。
[0067]
(3)本发明采用的“负等距-正移距”组合修形,利用齿轮消隙原理消减回差,实现了rv减速器的高精度。
[0068]
(4)本发明采用的“负等距-正移距”组合修形,磨削工艺简单,制造成本低。
[0069]
产业应用性
[0070]
根据本发明所涉及的用于机器人的rv减速器以及用于制造用于机器人的rv减速器的方法,有效解决用于机器人的rv减速器的静态和动态性能问题,实现质量稳定、良品率高、节约成本。
[0071]
以上所述仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。