1.本发明涉及智慧工地技术领域,尤其涉及一种自动护拦板目标定位与对准算法。
背景技术:
2.目前,高速公路护拦板安装均是由人工操作的,人工操作的劳动强度很大。护拦板安装过程是由人(多人)从地面抬起护拦板(通常是标准的三波板,重102kg),靠上护栏桩,然后拧螺丝。
3.由于正对护栏桩的护拦板一侧在地面上是“朝上”的,用机械方式抬起护拦板时就要实现“护拦板反转”才能靠上护栏桩,然后拧螺丝,然而,护拦板安装装备移动过程中不能提供目标定位与对准,无法实现自动安装的目的。
技术实现要素:
4.基于背景技术存在的技术问题,本发明提出了一种自动护拦板目标定位与对准算法。
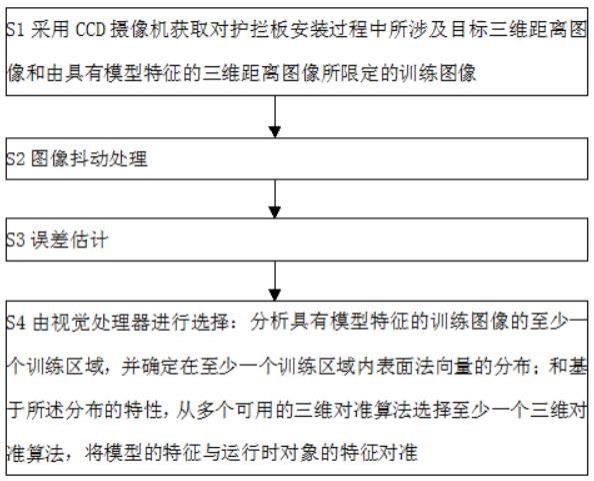
5.本发明提出的一种自动护拦板目标定位与对准算法,包括以下步骤:s1采用ccd摄像机获取对护拦板安装过程中所涉及目标三维距离图像和由具有模型特征的三维距离图像所限定的训练图像;s2图像抖动处理:根据抖动处理的需求利用软件仿真产生抖动矩阵配置文件;将产生的抖动矩阵配置文件通过外界主控单元以软件接口或硬件编程的形式写入到该存储单元内;写入到该存储单元的内容与图像抖动克服算法电路一起作用实现图像抖动处理;通过对图像进行抖动处理及显示,以观察处理效果是否符合软件仿真效果;若符合要求,则此次配置完成;若不符合要求,则重新进行处理,直到符合要求为止;s3误差估计:对处理后的图像进行确定目标,获取目标的坐标原点,采用“在一定范围内”的“点和直线”点的估计值和拟合直线并时时提供误差范围估计值,供控制器时时修正参数;s4由视觉处理器进行选择:分析具有模型特征的训练图像的至少一个训练区域,并确定在至少一个训练区域内表面法向量的分布;和基于所述分布的特性,从多个可用的三维对准算法选择至少一个三维对准算法,将模型的特征与运行时对象的特征对准。
6.优选的,所述步骤s1的目标包括:路面的边沿和坡度、护栏桩高度和螺孔位置、移动中护拦板边沿与中心线位置。
7.优选的,所述步骤s3的“在一定范围内”、“点和直线”点的估计值、误差范围估计值均指:标准光照下的相对误差为1%。
8.优选的,所述ccd摄像机包括多个位于隔开位置的分散的摄像机,以拍摄多个角度对象的场景。
9.优选的,所述训练图像为通过ccd是摄像机获取以合成图像提供,在训练图像内定位至少一个训练区域执行训练。
10.优选的,所述步骤s3采用误差估计算法得到估计误差。
11.优选的,所述步骤s3获取目标中路面边沿的坐标、与护栏桩的距离、与安装设备水平的坡度;与安装设备水平的护栏桩高度、螺孔距护栏桩顶部的位置距离、三个护栏桩是否平行;移动中护拦板边沿与中心线是否平行、与护栏桩是否平行。
12.本发明中,所述一种自动护拦板目标定位与对准算法,代替人眼的观测,与人眼相比更精确,采用常规图像处理方式,也无需采用“学习”算法,计算量小,时时的“误差”估计,为控制器时时参数修正提供依据,ccd运动状态下,克服图像的抖动干扰。
附图说明
13.图1为本发明提出的一种自动护拦板目标定位与对准算法的流程示意图。
具体实施方式
14.下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
15.参照图1,一种自动护拦板目标定位与对准算法,包括以下步骤:s1采用ccd摄像机获取对护拦板安装过程中所涉及目标三维距离图像和由具有模型特征的三维距离图像所限定的训练图像;s2图像抖动处理:根据抖动处理的需求利用软件仿真产生抖动矩阵配置文件;将产生的抖动矩阵配置文件通过外界主控单元以软件接口或硬件编程的形式写入到该存储单元内;写入到该存储单元的内容与图像抖动克服算法电路一起作用实现图像抖动处理;通过对图像进行抖动处理及显示,以观察处理效果是否符合软件仿真效果;若符合要求,则此次配置完成;若不符合要求,则重新进行处理,直到符合要求为止;s3误差估计:对处理后的图像进行确定目标,获取目标的坐标原点,采用“在一定范围内”的“点和直线”点的估计值和拟合直线并时时提供误差范围估计值,供控制器时时修正参数;s4由视觉处理器进行选择:分析具有模型特征的训练图像的至少一个训练区域,并确定在至少一个训练区域内表面法向量的分布;和基于所述分布的特性,从多个可用的三维对准算法选择至少一个三维对准算法,将模型的特征与运行时对象的特征对准。
16.本发明中,所述步骤s1的目标包括:路面的边沿和坡度、护栏桩高度和螺孔位置、移动中护拦板边沿与中心线位置。
17.本发明中,所述步骤s3的“在一定范围内”、“点和直线”点的估计值、误差范围估计值均指:标准光照下的相对误差为1%。
18.本发明中,所述ccd摄像机包括多个位于隔开位置的分散的摄像机,以拍摄多个角度对象的场景。
19.本发明中,所述训练图像为通过ccd是摄像机获取以合成图像提供,在训练图像内
定位至少一个训练区域执行训练。
20.本发明中,所述步骤s3采用误差估计算法得到估计误差。
21.本发明中,所述步骤s3获取目标中路面边沿的坐标、与护栏桩的距离、与安装设备水平的坡度;与安装设备水平的护栏桩高度、螺孔距护栏桩顶部的位置距离、三个护栏桩是否平行;移动中护拦板边沿与中心线是否平行、与护栏桩是否平行。
22.本发明:采用ccd摄像机获取对护拦板安装过程中所涉及目标三维距离图像和由具有模型特征的三维距离图像所限定的训练图像;图像抖动处理:根据抖动处理的需求利用软件仿真产生抖动矩阵配置文件;将产生的抖动矩阵配置文件通过外界主控单元以软件接口或硬件编程的形式写入到该存储单元内;写入到该存储单元的内容与图像抖动克服算法电路一起作用实现图像抖动处理;通过对图像进行抖动处理及显示,以观察处理效果是否符合软件仿真效果;若符合要求,则此次配置完成;若不符合要求,则重新进行处理,直到符合要求为止;误差估计:对处理后的图像进行确定目标,获取目标的坐标原点,采用“在一定范围内”的“点和直线”点的估计值和拟合直线并时时提供误差范围估计值,供控制器时时修正参数;由视觉处理器进行选择:分析具有模型特征的训练图像的至少一个训练区域,并确定在至少一个训练区域内表面法向量的分布;和基于所述分布的特性,从多个可用的三维对准算法选择至少一个三维对准算法,将模型的特征与运行时对象的特征对准。
23.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
技术特征:
1.一种自动护拦板目标定位与对准算法,其特征在于,包括以下步骤:s1采用ccd摄像机获取对护拦板安装过程中所涉及目标三维距离图像和由具有模型特征的三维距离图像所限定的训练图像;s2图像抖动处理:根据抖动处理的需求利用软件仿真产生抖动矩阵配置文件;将产生的抖动矩阵配置文件通过外界主控单元以软件接口或硬件编程的形式写入到该存储单元内;写入到该存储单元的内容与图像抖动克服算法电路一起作用实现图像抖动处理;通过对图像进行抖动处理及显示,以观察处理效果是否符合软件仿真效果;若符合要求,则此次配置完成;若不符合要求,则重新进行处理,直到符合要求为止;s3误差估计:对处理后的图像进行确定目标,获取目标的坐标原点,采用“在一定范围内”的“点和直线”点的估计值和拟合直线并时时提供误差范围估计值,供控制器时时修正参数;s4由视觉处理器进行选择:分析具有模型特征的训练图像的至少一个训练区域,并确定在至少一个训练区域内表面法向量的分布;和基于所述分布的特性,从多个可用的三维对准算法选择至少一个三维对准算法,将模型的特征与运行时对象的特征对准。2.根据权利要求1所述的一种自动护拦板目标定位与对准算法,其特征在于,所述步骤s1的目标包括:路面的边沿和坡度、护栏桩高度和螺孔位置、移动中护拦板边沿与中心线位置。3.根据权利要求1所述的一种自动护拦板目标定位与对准算法,其特征在于,所述步骤s3的“在一定范围内”、“点和直线”点的估计值、误差范围估计值均指:标准光照下的相对误差为1%。4.根据权利要求1所述的一种自动护拦板目标定位与对准算法,其特征在于,所述ccd摄像机包括多个位于隔开位置的分散的摄像机,以拍摄多个角度对象的场景。5.根据权利要求1所述的一种自动护拦板目标定位与对准算法,其特征在于,所述训练图像为通过ccd是摄像机获取以合成图像提供,在训练图像内定位至少一个训练区域执行训练。6.根据权利要求1所述的一种自动护拦板目标定位与对准算法,其特征在于,所述步骤s3采用误差估计算法得到估计误差。7.根据权利要求1所述的一种自动护拦板目标定位与对准算法,其特征在于,所述步骤s3获取目标中路面边沿的坐标、与护栏桩的距离、与安装设备水平的坡度;与安装设备水平的护栏桩高度、螺孔距护栏桩顶部的位置距离、三个护栏桩是否平行;移动中护拦板边沿与中心线是否平行、与护栏桩是否平行。
技术总结
本发明公开了一种自动护拦板目标定位与对准算法,包括以下步骤:采用CCD摄像机获取对护拦板安装过程中所涉及目标三维距离图像和由具有模型特征的三维距离图像所限定的训练图像;图像抖动处理;误差估计;由视觉处理器进行选择:分析具有模型特征的训练图像的至少一个训练区域,并确定在至少一个训练区域内表面法向量的分布;和基于所述分布的特性,从多个可用的三维对准算法选择至少一个三维对准算法,将模型的特征与运行时对象的特征对准。本发明代替人眼的观测,与人眼相比更精确,采用常规图像处理方式,也无需采用“学习”算法,计算量小,时时的“误差”估计,为控制器时时参数修正提供依据,CCD运动状态下,克服图像的抖动干扰。干扰。干扰。
技术研发人员:费树岷 王彬彬 陈叶亮 张明
受保护的技术使用者:南京东奇智能制造研究院有限公司
技术研发日:2021.09.26
技术公布日:2022/2/28
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
