用于对风电场中的一个或多个风力涡轮机进行计算机实现的监控的方法和装置
1.本发明涉及一种用于对风电场中的一个或多个风力涡轮机进行计算机实现的监控的方法和装置。
2.需要在风电场中的风力涡轮机的操作期间监控转子叶片的操作特性。所述操作特性给出关于作用在风力涡轮机上的力的反馈,并且使得能够适配风力涡轮机的控制策略,以便避免转子叶片的损坏。众所周知,基于安装在叶片内部靠近叶片根部的应变仪来测量作用在转子叶片上的根部弯矩。那些应变仪经常失效,并且由于它们位于叶片根部而很难更换。更进一步地,应变仪的测量精度很大程度上取决于它们的安装定位。
3.本发明的目的是提供一种简单的方法,以便在操作期间确定风力涡轮机的转子叶片的一个或多个操作特性。
4.该目的通过独立专利权利要求来解决。本发明的优选实施例在从属权利要求中定义。
5.本发明提供了一种用于对风电场中的一个或多个风力涡轮机进行计算机实现的监控的方法。每个风力涡轮机具有带有转子叶片的转子,转子叶片通过风绕转子轴线可旋转。根据本发明的方法,在风电场的操作期间执行一次或几次过程。该方法包括以下步骤i)和ii),所述步骤针对受监控的一个或多个风力涡轮机中的相应风力涡轮机的一个或多个转子叶片中的相应转子叶片来执行。
6.在步骤i)中,获得相应转子叶片的数字图像,该图像是由观察相应转子叶片的相机拍摄的当前图像。术语“当前图像”指代在正在执行的当前过程期间拍摄的图像。术语“相机”指点在紫外光和红外光之间的光谱的至少一部分中工作的成像设备。例如,相机可以在可见光光谱中工作。在优选实施例中,相机在光的红外光谱中工作,因此图像也可以在夜间获得。
7.在步骤ii)中,通过由经训练的数据驱动模型处理图像来确定相应转子叶片的一个或多个操作特性,其中图像作为数字输入被馈送到经训练的数据驱动模型,并且经训练的数据驱动模型提供相应转子叶片的一个或多个操作特性作为数字输出。数据驱动模型通过训练数据来训练,训练数据包括由相机拍摄的相应转子叶片的多个图像以及如在训练数据的相应图像中捕获的关于一个或多个操作特性的信息。
8.本发明的优点在于,仅仅通过拍摄转子叶片的图像并将图像馈送到经训练的数据驱动模型,就可以以简单且直接的方式确定转子叶片的操作特性。因此,不需要在具有要监控的转子叶片的风力涡轮机中安装容易出错的传感器,诸如应变仪。
9.在根据本发明的方法中,可以使用通过机器学习来学习的任何已知的数据驱动模型。在特别优选的实施例中,经训练的数据驱动模型是神经网络,优选地是特别适用于处理图像数据的卷积神经网络。然而,其他经训练的数据驱动模型也可以在本发明的方法中实现,例如基于决策树或支持向量机的模型。
10.在本发明的优选实施例中,基于一个或多个操作特性(即,基于数据驱动模型的数字输出)的信息经由用户接口输出。例如,所述一个或多个操作特性本身可以经由用户接口
输出。可替代地或附加地,在操作特性中的至少一个不满足关于风力涡轮机的正常操作的预定准则的情况下,可以经由用户接口提供警告。例如,在操作特性指示转子叶片上的负载过大的情况下,可以经由用户接口生成对应的警告,使得向人类操作员通知该操作状况,并且可以启动适当的应对措施。优选地,用户接口包括视觉用户接口,但是它也可以包括另一种类型的用户接口(例如声学用户接口)。
11.在特别优选的实施例中,所述一个或多个操作特性包括至少一个根部弯矩,即作用在转子轮毂上的转子叶片上的附接点上的弯矩。优选地,所述至少一个根部弯矩包括边缘方向的根部弯矩和/或襟翼方向的根部弯矩。这些弯矩是众所周知的。边缘方向的根部弯矩沿转子的旋转方向作用在相应的转子叶片上,襟翼方向的根部弯矩是沿转子轴线作用在相应的转子叶片上的弯矩。
12.在另一实施例中,一个或多个特性包括相应转子叶片尖端的偏转,即转子叶片尖端相对于转子叶片根部的定位。优选地,通过该偏转确定风速,从而提供风速计的功能。风速可以经由用户接口输出,以便通知人类操作员。
13.在另一实施例中,一个或多个操作特性包括相应转子叶片的扭曲,即,与未扭曲状态(即,没有风作用在相应转子叶片上的状态)相比,相应转子叶片的纵向轴线从转子叶片的根部到顶端的扭曲。
14.拍摄相应转子叶片图像的相机可以安装在不同的定位处。在一个实施例中,相机安装在针对其执行该过程的相应风力涡轮机的机舱上。然而,相机也可以安装在针对其执行该过程的相应风力涡轮机的(旋转的)转子轮毂上。在这种情况下,相机与转子一起旋转,并用于监控相应风力涡轮机的特定转子叶片。
15.在另一实施例中,相机安装在与针对其执行该过程的相应风力涡轮机不同的另一风力涡轮机上。在这种情况下,相机优选在基本垂直于相应风力涡轮机的转子轴线的方向上观察相应的转子叶片。换句话说,相机的光轴基本上垂直于转子轴。
16.在特别优选的实施例中,在拍摄图像时相应转子叶片围绕转子轴线的角定位作为附加输入被馈送到数据驱动模型。这使得能够针对不同角定位检测转子叶片的操作特性。为了实现该实施例,训练数据还包括在训练数据的相应图像中捕获的相应转子叶片的角定位。
17.在本发明的另一优选变型中,在步骤i)中拥有由相机拍摄的相应转子叶片的若干图像,其中根据一个或多个质量准则具有最佳图像质量的图像被选取为在步骤i)中获得的图像。用于定义图像质量的质量准则对于技术人员来说是众所周知的。例如,质量准则可以指代图像清晰度。
18.在本发明的另一优选实施例中,对相应风力涡轮机的几个转子叶片执行包括步骤i)和ii)的过程,其中被标识的转子叶片具有与其它转子叶片的一个或多个操作特性的偏差高于预定阈值的一个或多个操作特性。取决于情况,该偏差可以被不同地定义。例如,包括作为条目的(优选地归一化的)操作特性的矢量可以用于相应的转子叶片,其中矢量的欧几里德距离指示偏差。
19.在另一实施例中,基于针对其执行该过程的相应风力涡轮机的至少一个转子叶片的一个或多个操作特性来检测具有对应阵风风速的阵风。对于本领域技术人员来说众所周知的是,操作特性的改变与阵风之间存在相关性。特别地,阵风将导致相应转子叶片尖端的
高度偏转。该偏转的量是阵风风速的指标。
20.在上述实施例的优选变型中,取决于阵风风速来适配相对于针对其执行该过程的相应风力涡轮机的风向位于下游的风力涡轮机的控制。例如,可以通过使用相应风力涡轮机和下游风力涡轮机之间的已知距离来计算阵风何时到达下游风力涡轮机,其中下游风力涡轮机的控制在阵风到达时被适配。
21.除了上述方法之外,本发明涉及一种用于对风电场中的一个或多个风力涡轮机进行计算机实现的监控的装置,每个风力涡轮机具有转子,转子具有通过风绕转子轴线可旋转的转子叶片,其中该装置包括处理器,处理器被配置为执行根据本发明的方法或根据本发明的方法的一个或多个优选实施例。
22.更进一步地,本发明涉及包括多个风力涡轮机(即,至少一个风力涡轮机)的风电场,其中风电场包括根据本发明的上述装置,以便监控风电场的一个或多个风力涡轮机。
23.此外,本发明涉及具有存储在非暂时性机器可读载体上的程序代码的计算机程序产品,用于当程序代码在计算机上执行时实行根据本发明或其一个或多个优选实施例的方法。
24.更进一步地,本发明涉及具有程序代码的计算机程序,当程序代码在计算机上执行时,该程序代码用于实行根据本发明或其一个或多个优选实施例的方法。
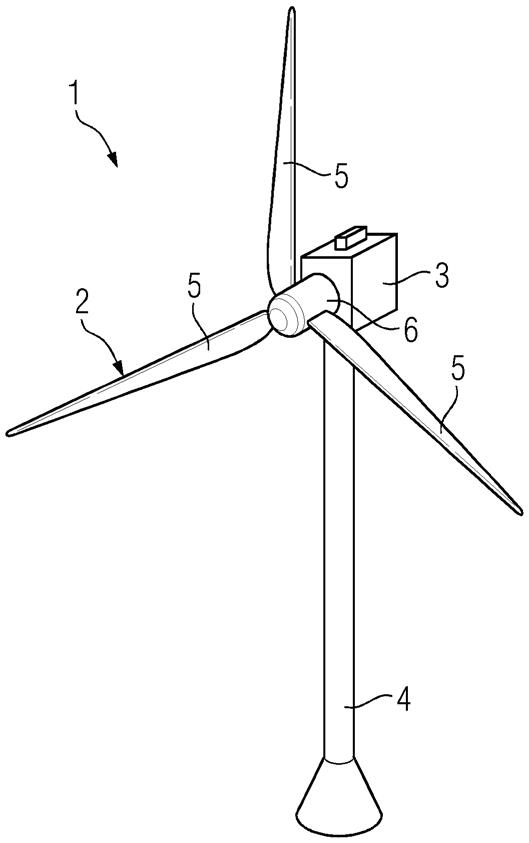
25.现在将参照附图详细描述本发明的实施例。图1是包括用于执行本发明实施例的控制器的风电场的示意图。
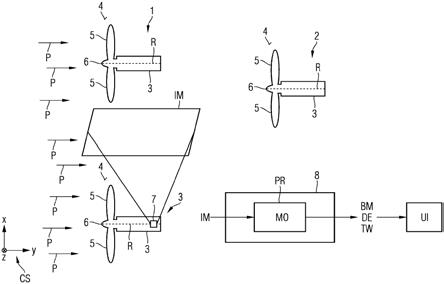
26.图1示出了包括三个风力涡轮机1、2和3的风电场的一部分的俯视平面图,其中基于本发明的实施例监控风力涡轮机1。整个风电场包括多于这三个风力涡轮机1至3。图1还包括指示风电场的风力涡轮机1、2和3的空间布置的3d坐标系cs。坐标系cs的z轴指代竖向方向,而x轴和y轴指代垂直于竖向z方向的水平方向。沿着y轴的方向对应于也由多个箭头p指示的风向。
27.风力涡轮机1、2、3中的每个的构造是相同的。即,每个风力涡轮机包括塔架(未示出),机舱3位于塔架顶部。转子4附接到该机舱。转子4包括转子轮毂6,三个转子叶片5从转子轮毂6延伸,其中在图1中只能看到那些转子叶片中的两个。转子通过风绕转子轴线r旋转。转子叶片绕转子轴线r以120
°
的角度彼此间隔开。机舱3容纳发电机(未示出),发电机将由风驱动的转子4的机械能转换成电能。
28.本文描述的方法使得能够通过由相机7拍摄的图像im监控涡轮机1。该相机安装在风力涡轮机3的机舱的顶部,在x方向上邻近于涡轮机1定位。相机7是侧视相机,并且拍摄风力涡轮机1的转子叶片的图像。在图1的场景中,相机7在基本垂直于风力涡轮机1的转子轴线r的方向上观察。换句话说,相机7的光轴基本上垂直于风力涡轮机1的转子轴线r。优选地,相机7覆盖宽的角度范围,以在许多情况下(对于尽可能多的风向)覆盖涡轮机1。更进一步地,相机优选地不是静态安装在风力涡轮机3上,而是适配自身以使相邻涡轮机1位于其中心。
29.使用相机7的图像im以便针对风力涡轮机1的转子每旋转360
°
确定其转子叶片的一个或多个操作特性。在本文描述的实施例中,当特定转子叶片沿着坐标系cs的z轴处于向上方向时的操作特性通过当转子叶片处于向上定位时由相机7拍摄该转子叶片的图像im来确定。然而,还可以通过由相机7拍摄这些转子叶片的适当图像,来导出风力涡轮机1的多于
一个转子叶片或其他转子叶片的操作特性。此外,当拍摄相应转子叶片的图像时,叶片不需要处于向上的定位,而是可以具有绕转子轴线r的另外的角定位。
30.由相机7拍摄的对应图像im经由适当的通信链路传递到控制器8,控制器8通过若干个通信链路连接到风电场的所有风力涡轮机,并控制那些风力涡轮机的操作。控制器8包括实现经训练的数据驱动模型mo的处理器pr。
31.数据驱动模型mo通过机器学习方法来学习。在本文描述的实施例中,数据驱动模型是卷积神经网络,其特别适用于处理图像。然而,可以使用另外的数据驱动模型,例如决策树或支持向量机。数据驱动模型mo接收对应的图像im作为数字输入,并生成以如由图像im捕获的风力涡轮机1的对应转子叶片的操作特性形式的数字输出。
32.在本文描述的实施例中,操作特性包括在相应转子叶片的襟翼方向和边缘方向这两者上的根部弯矩bm。为了生成该输出,数据驱动模型mo通过训练图像来训练,其中每个训练图像的边缘方向和襟翼方向的根部弯矩是已知的。那些图像在训练阶段期间由图1的风电场中的相机7或者由具有与图1中相同布置的另一风电场中的相机拍摄,其中所述图像是从与风力涡轮机1相同类型的风力涡轮机的转子叶片拍摄的。为了通过经训练的数据驱动模型mo生成精确的输出,训练阶段已经覆盖了风力涡轮机1从接入(即,当风力涡轮机开始发电时)到切断(即,当风力涡轮机由于风速过高而关闭时)的整个风速范围。
33.除了根部弯矩bm之外或作为根部弯矩bm的替代,相应转子叶片的其他操作特性可以由经训练的数据驱动模型mo输出。如图1中指示的,那些操作特性可以指代相应转子叶片的尖端的偏转de,即转子叶片的尖端相对于转子叶片根部的定位。在另一个实施例中,操作特性包括相应转子叶片的扭曲,即,与未扭曲状态(即,没有风作用在相应转子叶片上的状态)相比,相应转子叶片的纵向轴线从转子叶片的根部到顶端的扭曲。
34.为了输出操作特性de和tw,需要通过适当的训练数据针对这些特性训练数据驱动模型mo或附加的数据驱动模型。那些训练数据包括由相机7拍摄的图像,以及每个图像的附加信息,其中图像中捕获的涡轮机状态下存在叶片偏转de和/或扭曲tw。
35.在图1的实施例中,基于操作特性的信息经由用户接口ui输出,以便向人类操作员通知那些特性。基于操作特性的信息可以是特征本身。可替代地或附加地,在操作特性超过预定阈值的情况下,该信息可以是警告。
36.更进一步地,在修改的实施例中,叶片偏转de用于适配相对于风力涡轮机1的风向位于下游定位的风力涡轮机2的控制策略。为此,通过分析叶片偏转de来检测阵风(如果存在的话)。这是可能的,因为叶片偏转是阵风的直接度量(即短时间偏转)。在检测到阵风的情况下,阵风的对应风速也可以从叶片偏转中导出。通过使用阵风的风速,控制器8确定阵风将何时到达风力涡轮机2。该确定是直接的,因为涡轮机1和2这两者之间的在y方向上的距离被存储在控制器8中,使得阵风的到达时间可以通过将该距离除以阵风的风速来计算。基于关于阵风到达时间的知识,适配风力涡轮机2的控制策略,使得当阵风到达时较低的负载作用在涡轮机2上,以便补偿阵风。
37.在另一个修改的实施例中,针对风力涡轮机1的所有三个转子叶片确定操作特性中的至少一个,并且特别是叶片偏转和叶片扭曲,并且将不同叶片的操作特性的值相互比较。通过这样做,可以检测到一个叶片与其他叶片相比显著不同的操作特性。该检测可以是具有显著不同操作特性的转子叶片的故障的指示。关于显著不同的操作特性的信息可以被
记录用于进一步分析和/或可以经由用户接口ui输出警告,使得向人类操作者通知风力涡轮机1的转子叶片的可能故障。
38.在图1的实施例中,风力涡轮机1的叶片由安装在另一风力涡轮机2上的相机7监控。然而,风力涡轮机1的叶片也可以由安装在风力涡轮机1本身上的相机监控。例如,相机可以安装在风力涡轮机1的机舱3上。优选地,该相机向上观察,以便捕捉处于向上定位的转子叶片。此外,相机也可以安装在与叶片5一起旋转的风力涡轮机1的转子轮毂6处。在这种情况下,相机优选地沿着要监控的叶片的纵轴向上观察。如果要监控多于一个叶片,则需要在转子轮毂处为每个叶片安装一个相机。
39.在本发明的另一实施例中,在风力涡轮机1的转子4的一次旋转期间,从同一转子叶片拍摄若干图像。此后,根据预定准则具有最佳质量(例如,最佳图像清晰度)的图像被用作要输入到数据驱动模型mo的图像im。这提高了由数据驱动模型mo确定操作特性的精度。类似的方法可以在训练阶段应用。即,可以在训练阶段期间取得对应叶片的若干图像以及由图像捕获的关于操作特性的信息。具有最佳图像质量的图像此后被用作训练数据集,而其他图像被丢弃。
40.在另一优选实施例中,转子叶片5绕风力涡轮机1的转子轴线r的角定位被用作经训练的数据驱动模型的附加输入。在这种情况下,用于训练数据驱动模型的图像还包括存在于训练数据的相应图像中的叶片定位的信息。
41.前面描述的本发明具有若干优点。特别地,提供了一种简单且直接的方法以便检测风力涡轮机的转子叶片的操作特性。为此,经由适当训练的数据驱动模型,基于相机的图像来确定操作特性。因此,不需要安装传感器,诸如应变仪,来检测转子叶片的操作特性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。