1.本技术属于清洁设备技术领域,尤其涉及一种清洁设备及其升降装置的位置检测机构。
背景技术:
2.出于功能需要,清洁设备设有升降装置。例如,处于刮灰需求、尘桶开盖需求等。升降装置一般设于清洁设备内部,在外部难以确定升降装置的位置。
技术实现要素:
3.本技术实施例的目的在于提供一种清洁设备及其升降装置的位置检测机构,能够确定升降装置的位置。
4.一方面,本技术实施例提供了一种清洁设备的升降装置的位置检测机构,包括:
5.反射部,设于升降装置;
6.检测部,与反射部相对设置,所述检测部用于根据接收由反射部反射回来的光发出反射信号;
7.处理器,与检测部电连接,通过所述反射信号确定升降装置的位置。
8.可选实施例中,所述反射部包括反射条,所述反射条间隔设置,相邻两个所述反射条之间形成低反射段,所述低反射段的反射率低于所述反射条的反射率。
9.可选实施例中,所述反射部包括:
10.第一反射部,其用于升降装置位于第一位置时,反射所述检测部发出的光;
11.第二反射部,其用于升降装置位于第二位置时,反射所述检测部发出的光。
12.可选实施例中,升降装置位于第一位置时,所述检测部根据接收相应的反射部反射回来的光,发出第一反射信号,所述处理器通过所述第一反射信号确定升降装置位于第一位置;
13.升降装置位于第二位置时,所述检测部根据接收相应的反射部反射回来的光,发出第二反射信号,所述处理器通过所述第二反射信号确定升降装置位于第二位置。
14.可选实施例中,所述第一反射部的反射条与所述第二反射部的反射条至少宽度、长度和间距中的一个不同。
15.可选实施例中,所述反射部的反射条连续布置,升降装置移动时,反射条及低反射段交替对所述检测部发出的光反射,所述检测部根据接收的反射回来的光发出相应反射信号。
16.可选实施例中,所述反射条等宽,且等间距布置;
17.或,沿着所述升降装置的运动方向,所述反射条的间距和宽度的至少之一逐渐增大。
18.可选实施例中,所述检测部包括第一检测部和第二检测部;
19.升降装置位于第一位置时,所述第一检测部与所述第一反射部相对,所述第二检
测部与所述第二反射部相对;
20.升降装置位于第二位置时,所述第一反射部与所述第二检测部相对。
21.可选实施例中,所述检测部包括:
22.发射器,用于发射光;
23.接收器,用于接收由反射部反射回来的发射器发出的光,并根据接收的光发出所述反射信号。
24.第二方面,本技术实施例提供了一种清洁设备,其包括上述任一实施例所述的位置检测机构。
25.本技术实施例提供的位置检测机构中,包括设置在升降装置上的反射部、与反射部相对设置的检测部和处理器。反射部能够对光进行反射,检测部能够发射光和根据接收反射部反射回来的光发出反射信号,接收器能够根据反射信号确定升降装置的位置。本技术实施例无需打开清洁设备即可确定升降装置的位置。
26.应当理解,前面的一般描述和以下详细描述都仅是示例性和说明性的,而不是用于限制本技术。
27.本技术中描述的技术的各种实现或示例的概述,并不是所公开技术的全部范围或所有特征的全面公开。
附图说明
28.在不一定按比例绘制的附图中,相同的附图标记可以在不同的视图中描述相似的部件。具有字母后缀或不同字母后缀的相同附图标记可以表示相似部件的不同实例。附图大体上通过举例而不是限制的方式示出各种实施例,并且与说明书以及权利要求书一起用于对本技术的实施例进行说明。在适当的时候,在所有附图中使用相同的附图标记指代同一或相似的部分。这样的实施例是例证性的,而并非旨在作为本装置或方法的穷尽或排他实施例。
29.图1-图4分别示出了本技术一实施例的位置检测机构的原理结构示意图。
30.图5示出了图1和图2所示实施例检测部发出的发射信号的对比示意图。
31.图中标号说明
32.1-升降装置;2-反射部;21-第一反射部;22-第二反射部;23-反射条;3-检测部;31-发射器;32-接收器;4-处理器。
具体实施方式
33.为了使得本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例的附图,对本技术实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本技术的一部分实施例,而不是全部的实施例。基于所描述的本技术的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本技术保护的范围。
34.除非另外定义,本技术使用的技术术语或者科学术语应当为本技术所属领域内具有一般技能的人士所理解的通常意义。本技术中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等
类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
35.为了保持本技术实施例的以下说明清楚且简明,本技术省略了已知功能和已知部件的详细说明。
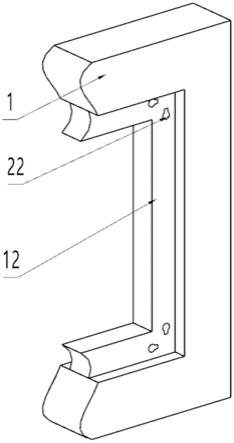
36.参见图1至图4,本技术实施例提供的一种清洁设备的升降装置1的位置检测机构,包括:
37.反射部2,设于升降装置1;
38.检测部3,与反射部2相对设置,检测部3用于根据接收由反射部2反射回来的光发出反射信号;
39.处理器4,与检测部3电连接,通过反射信号确定升降装置1的位置。
40.本技术实施例提供的位置检测机构中,包括设置在升降装置1上的反射部2、与反射部2相对设置的检测部3和处理器4。反射部2能够对光进行反射,检测部3能够发射光和根据接收反射部2反射回来的光发出反射信号,接收器32能够根据反射信号确定升降装置1的位置。本技术实施例无需打开清洁设备即可确定升降装置1的位置。
41.本技术实施例中,检测部3能够发射光,并接收反射回来的光,并根据接收的反射回来的光发出相应的反射信号。反射部2对检测部3发出的光反射会有不同。例如,同等距离条件下,反射部2的反射率越高,检测部3接收的反射回来的光的光强越大。检测部3根据接收的反射光的光强变化,以相应的电平形式发出反射信号。例如,接收的光强曾大,发出的电平随之增加,光强减小,发出的电平随之减小。
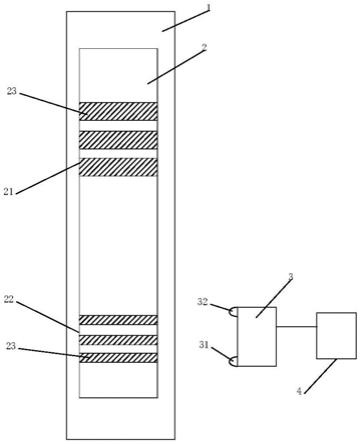
42.参见图1-图4,一些实施例中,检测部3包括发射器31和接收器32。其中发射器31用于发射光。接收器32用于接收由反射部2反射回来的发射器31发出的光,并根据接收的光发出反射信号。
43.本技术实施例中,处理器4通过反射信号确定升降装置1的位置,具体实施例中,可以是根据反射信号,例如电平值的大小来确定升降装置1的位置。也可以根据反射信号,例如电平值的变化规律来确定升降装置1的位置。
44.示例性实施例中,升降装置1可以是在靠近或远离检测部3的方向,即第一方向上移动,反射部2随升降装置1靠近或远离检测部3。当升降装置1远离检测部3时,检测部3接收反射部2反射的光强减小,反之,当升降装置1靠近检测部3时,检测部3接收反射部2反射的光强增加。检测部3根据接收的光强发出电平值随之增大或减小,处理器4可以根据电平值的大小确定反射部2距检测部3的距离,从而确定升降装置1的位置。
45.另外的示例性实施例中,升降装置1在垂直于第一方向的第二方向移动时,检测部3至升降装置1的距离不变,反射部2可以设置不同反射率的部位,随着升降装置1的移动,检测部3发射的光会被不同反射率的部位反射,检测部3根据接收的反射回来的光,发出相应的反射信号。处理器4可以根据反射信号确定对应的反射的部位,从而确定升降装置1的位置。
46.当然,除了上述具体实施之外,也可以根据反射率高低变化与反射光强的关系,反
射部2按一定规律反射光,检测部3相应地按一定规律发出反射信号。处理器4据此确定升降装置1的位置。
47.参见图1-图4,一些实施例中,反射部2包括反射条23,反射条23间隔设置,相邻两个反射条23之间形成低反射段,低反射段的反射率低于反射条23的反射率。升降装置1移动时,间隔设置的反射条23形成的条纹对光进行高-低交替的反射,处理器4据此确定升降装置1的位置。处理器4根据检测部3接收条纹反射的光而发出的发射信号确定升降装置1的位置可以在下面的相关实施例中进一步说明。
48.参见图1和图2,一些实施例中,反射部2包括第一反射部21和第二反射部22。第一反射部21用于升降装置1位于第一位置时,反射检测部3发出的光。第二反射部22用于升降装置1位于第二位置时,反射检测部3发出的光。第一反射部21和第二反射部22分别与升降装置1的第一位置和第二位置相对。参见图2,当检测部3接收到第一反射部21反射回来的光时,可以相应地发出发射信号,处理器4据此可确定升降装置1位于第一位置。同理,参见图1,当检测部3接收到第二反射部22反射回来的光时,可以相应地发出发射信号,处理器4据此可确定升降装置1位于第二位置。示例性实施例中,第一位置和第二位置可以是升降装置1行程的两个终点位置,例如第一位置为升降装置1升至最高点的位置,第二位置为升降装置1降至最低点的位置。当然,也可以包括第三反射部2或更多反射部2以与升降装置1行程的不同位置对应。或者,在仅需确定行程的最高点或最低点等某一位置时,可以仅对应设置一个检测部3。
49.一些实施例中,可以仅设置一个检测部3。升降装置1位于第一位置时,检测部3根据接收相应的反射部2反射回来的光,发出第一反射信号,处理器4通过第一反射信号确定升降装置1位于第一位置。升降装置1位于第二位置时,检测部3根据接收相应的反射部2反射回来的光,发出第二反射信号,处理器4通过第二反射信号确定升降装置1位于第二位置。当如上述实施例中反射部2包括第一反射部21和第二反射部22时,升降装置1移动至第一位置或第二位置,检测部3分别接收第一反射部21或第二反射部22反射回来的光。当反射部2为一个整体时,例如反射部2在升降装置1移动方向上连续设置,可以反射部2的不同位置的反射情况不同。具体实施中,可以是反射率不同。
50.一些实施例中,反射部2包括反射条23时,第一反射部21和第二反射部22的反射条23布置不同,以便检测部3能够发出不同的反射信号。
51.参见图1和图2,示例性实施例中,第一反射部21的反射条23与第二反射部22的反射条23至少宽度、长度和间距中的一个不同。参见图5,图5中,位于上部的为图2中检测部3根据依次接收第一反射部21反射的光发出的电平图。位于下部的为图中检测部3根据依次接收第二反射部22反射的光发出的电平图。例如,第一反射部21的反射条23的宽度大于第二反射部22的反射条23的宽度,检测部3根据依次接收第一反射部21反射回来的光而发出脉冲形式的电平的脉冲宽度大于根据第二反射部22反射回来的光而发出的电平的脉冲宽度。
52.参见图3和图4,一些实施例中,反射部2的反射条23连续布置。反射部2的长度可以是等于升降装置1的行程。反射条23在升降装置1的移动方向上连续布置。相对设置的检测部3可以在升降装置1移动的整个行程过程中连续接收按设计布置好的反射条23构成的图案反射回来的光,从而处理器4能够据此确定升降装置1的位置。升降装置1移动时,反射条
23及低反射段交替对检测部3发出的光反射,检测部3根据接收的反射回来的光发出相应反射信号。
53.反射条23在升降装置1移动方向上连续布置,处理器4根据检测部3发出的反射信号能够确定升降装置1的位置。
54.参见图3,一些实施例中,反射条23等宽,且等间距布置。等宽的反射条23等间距布置,任一相邻的两个反射条23之间的距离相等。而对应于反射条23和低反射段的反射,检测部3发出的反射信号,例如电平不同。从升降装置1行程的一个端点开始计数,处理器4能够根据反射信号统计经过的反射条23或低反射段的数量,根据经过的反射条23或低反射段的数量即可确定升降装置1移动的距离,从而能够确定升降装置1的位置。
55.或者,参见图4,另外的一些实施例中,沿着升降装置1的运动方向,反射条23的间距和宽度的至少之一逐渐增大。反射条23的宽度不同,检测部3对应发出的高电平的宽度也不同,而反射条23的间距不同,检测部3对应发出的低电平的宽度也不同。处理器4根据高电平或低电平的宽度确定升降装置1的位置。
56.上述实施例中,根据反射部2的不同具体布置,可以相对设置一个检测部3来发出相应的反射信号,处理器4能够据此确定升降装置1的位置。另外的实施例中,检测部3也可以设置多个。
57.一些实施例中,检测部3包括第一检测部3和第二检测部3。升降装置1位于第一位置时,第一检测部3与第一反射部21相对,第二检测部3与第二反射部22相对。升降装置1位于第二位置时,第一反射部21与第二检测部3相对。通过设置两个或更多的反射部2可以根据不同情况发出发射信号,供处理器4据此确定升降装置1的位置。
58.第二方面,本技术实施例提供了一种清洁设备,其包括上述任一实施例的位置检测机构。
59.本技术实施例中的升降装置1例如可以是刮灰装置的驱动杆,或者是用于开启尘桶盖的连杆等。检测部3可以相对设于尘桶,或其他适当的位置。处理器4可以与清洁装置的控制芯片合并,清洁装置的控制芯片与检测部3连接,实现检测机构的处理器4功能。
60.以上描述旨在是说明性的而不是限制性的。例如,上述示例(或其一个或更多方案)可以彼此组合使用,并且考虑这些实施例可以以各种组合或排列彼此组合。本技术的范围应参照所附权利要求以及这些权利要求赋权的等同形式的全部范围来确定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。