技术特征:
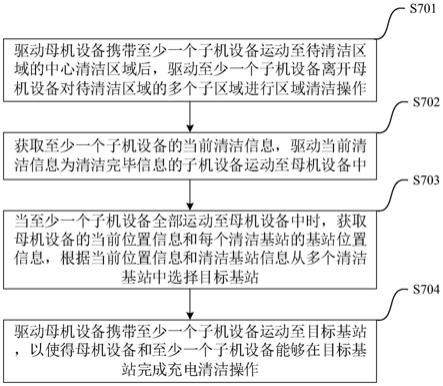
1.一种洗地机器人的清洁方法,其特征在于,应用于清洁系统,所述清洁系统包括位于待清洁区域的一个或多个清洁基站、母机设备和至少一个子机设备,所述至少一个子机设备能够存储于所述母机设备中;所述洗地机器人的清洁方法包括如下步骤:驱动所述母机设备携带所述至少一个子机设备运动至所述待清洁区域的所述中心清洁区域后,驱动所述至少一个子机设备离开所述母机设备对所述待清洁区域的所述多个子区域进行区域清洁操作;获取所述至少一个子机设备的当前清洁信息,驱动所述当前清洁信息为清洁完毕信息的所述子机设备运动至所述母机设备中;当所述至少一个子机设备全部运动至所述母机设备中时,获取所述母机设备的当前位置信息和每个所述清洁基站的基站位置信息,根据所述当前位置信息和所述清洁基站信息从所述一个或多个清洁基站中选择目标基站;驱动所述母机设备携带所述至少一个子机设备运动至所述目标基站,以使得所述母机设备和所述至少一个子机设备能够在所述目标基站完成充电清洁操作。2.根据权利要求1所述的洗地机器人的清洁方法,其特征在于,所述当前清洁信息包括子机位置信息;所述获取所述至少一个子机设备的当前清洁信息的步骤之后,包括:根据所述当前清洁信息为所述清洁完毕的所述子机设备的子机位置信息获取接收地点,驱动所述母机设备运动至所述接收地点。3.根据权利要求2所述的洗地机器人的清洁方法,其特征在于,所述根据所述当前清洁信息为所述清洁完毕的所述子机设备的子机位置信息获取所述接收地点的步骤之后,包括:获取所述母机设备的当前状态信息,根据所述当前状态信息和每个所述清洁基站的基站位置信息修正所述接收地点的位置信息。4.根据权利要求3所述的洗地机器人的清洁方法,其特征在于,所述当前状态信息包括当前剩余电量、当前剩余清水量、当前存储污水量、当前待充电量中的至少一个。5.根据权利要求3所述的洗地机器人的清洁方法,其特征在于,所述驱动所述至少一个子机设备离开所述母机设备对所述待清洁区域的所述多个子区域进行区域清洁操作的步骤之后,包括:根据所述当前状态信息判断所述母机设备是否需要提前运动至所述清洁基站完成所述充电清洁操作;若所述母机设备需要提前运动至所述清洁基站完成所述充电清洁操作,则获取所述母机设备的所述当前位置信息和每个所述清洁基站的所述基站位置信息;根据所述当前位置信息和所述清洁基站信息从所述一个或多个清洁基站中选择临时基站;驱动所述母机设备运动至所述临时基站,当所述母机设备完成所述充电清洁操作之后,驱动所述母机设备运动至所述当前位置信息对应的位置。6.根据权利要求1所述的洗地机器人的清洁方法,其特征在于,所述根据所述当前位置信息和所述清洁基站信息从所述一个或多个清洁基站中选择目标基站的步骤之后,包括:
向所述目标基站发出待处理通知,以使得所述目标基站处于待处理状态,以使得所述母机设备和所述至少一个子机设备能够在所述目标基站完成充电清洁操作。7.根据权利要求1所述的洗地机器人的清洁方法,其特征在于,所述驱动所述母机设备携带所述至少一个子机设备运动至所述目标基站的步骤之后,包括:驱动每个所述子机设备在所述母机设备中进行子机设备充电清洁操作;驱动所述母机设备在所述目标基站进行母机设备充电清洁操作。8.一种洗地机器人的清洁系统,其特征在于,所述洗地机器人的清洁系统包括如下模块:驱动模块,用于驱动所述母机设备携带所述至少一个子机设备运动至所述待清洁区域的所述中心清洁区域后,驱动所述至少一个子机设备离开所述母机设备对所述待清洁区域的所述多个子区域进行区域清洁操作;运动模块,用于获取所述至少一个子机设备的当前清洁信息,根据所述当前清洁信息驱动所述母机设备运动至接收地点后,驱动所述当前清洁信息为清洁完毕信息的所述子机设备运动至所述母机设备中;选择模块,用于当所述至少一个子机设备全部运动至所述母机设备中时,获取所述母机设备的当前位置信息和每个所述清洁基站的基站位置信息,根据所述当前位置信息和所述清洁基站信息从所述一个或多个清洁基站中选择目标基站;清洁模块,用于驱动所述母机设备携带所述至少一个子机设备运动至所述目标基站,以使得所述母机设备和所述至少一个子机设备能够在所述目标基站完成充电清洁操作。9.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述方法的步骤。10.一种清洁设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述方法的步骤。
技术总结
本发明实施例公开了一种洗地机器人的清洁方法、系统、清洁设备和存储介质。包括如下步骤:驱动母机设备携带至少一个子机设备运动至待清洁区域的中心清洁区域后,驱动至少一个子机设备离开母机设备对待清洁区域的多个子区域进行区域清洁操作;获取至少一个子机设备的当前清洁信息,驱动当前清洁信息为清洁完毕信息的子机设备运动至母机设备中;当至少一个子机设备全部运动至母机设备中时,获取母机设备的当前位置信息和每个清洁基站的基站位置信息,根据当前位置信息和清洁基站信息从一个或多个清洁基站中选择目标基站;驱动母机设备携带至少一个子机设备运动至目标基站,以使得母机设备和至少一个子机设备能够在目标基站完成充电清洁操作。成充电清洁操作。成充电清洁操作。
技术研发人员:孙晓晖
受保护的技术使用者:深圳市探博智能机器人有限公司
技术研发日:2021.11.16
技术公布日:2022/2/24
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。