1.本发明涉及医疗领域,特别是一种磁场生成器标定装置及标定方法。
背景技术:
2.医疗导航定位系统涉及三维空间中目标物(也称探测器或磁场传感器)的跟踪定位,电磁导航是其中一种被广泛采用的方法。电磁导航系统中涉及磁场生成器和目标物,常见安装有目标物的装置包括导管、导丝、导引器(鞘管)、探针等,应用领域包括心脏介入治疗导航、肺支气管定位导航、肾动脉消融导航等。
3.现有的磁场生成器存在空间不同位置定位精度不同的不足,严重影响了电磁导航系统的定位精度,对治疗过程产生不利影响。
技术实现要素:
4.本发明的目的在于:针对现有技术存在的现有的磁场生成器在空间不同位置定位精度不同,严重影响了电磁导航系统的定位精度,对治疗过程产生不利影响的问题,提供一种磁场生成器标定装置及标定方法。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种磁场生成器标定装置,包括安装体,所述安装体固定安装有至少六个磁场传感器,所述磁场传感器的三维空间位置和摆放角度已知,所述摆放角度包括俯仰角(极角)和方向角(方位角)。所述磁场传感器为励磁线圈。
7.本发明设计了一种磁场生成器标定装置,标定装置为安装有多个已知相对位置磁场传感器的立体装置,标定装置用于确定磁场生成器的摆放位置和摆放方向,进而可以解决现有磁场生成器存在空间不同位置定位精度不同的问题,从而能够进一步优化所述磁场生成器,更加符合医疗领域的使用需求。
8.进一步地,本发明通过设置安装体结构,便于所述磁场传感器的集成安装,且便于获取所述磁场传感器的三维空间位置和摆放角度(在加工制作安装体结构时,即可设计和确定所述磁场传感器的三维空间位置和摆放角度),进而简化了后续的标定计算。
9.作为本发明的优选方案,所述磁场传感器具有多个俯仰角,和/或所述磁场传感器具有多个方向角,从而能够提高标定精度。
10.作为本发明的优选方案,所述磁场传感器的数量大于或等于15个,从而能够提高标定精度。
11.作为本发明的优选方案,所述安装体开设有插孔,所述插孔的三维空间位置和摆放角度已知,所述插孔适配所述磁场传感器,所述磁场传感器放置于所述插孔内。通过设计所述插孔,便于安装和取放所述磁场传感器,也便于确定所述磁场传感器的三维空间位置和摆放角度。
12.作为本发明的优选方案,所述磁场传感器粘接固定于所述插孔内,避免所述磁场传感器发生位移和变形而影响标定精度。
13.作为本发明的优选方案,所述插孔具有多个俯仰角,和/或所述插孔具有多个方向角,从而安装在其内的所述磁场传感器具有多个俯仰角,和/或所述磁场传感器具有多个方向角,能够提高标定精度。
14.作为本发明的优选方案,所述安装体为多面体或旋转体,便于所述磁场传感器的集成安装,且便于获取所述磁场传感器的三维空间位置和摆放角度。所述安装体也可选用其他结构,只要能事先确定安装于其上的所述磁场传感器的三维空间位置和摆放角度即可。
15.作为本发明的优选方案,所述多面体的每个面上均开设有至少3个所述插孔。插孔的数量越多,可安装的磁场传感器越多,而安装的磁场传感器越多,标定的精度就越高。
16.作为本发明的优选方案,所述安装体为实心结构或框梁结构。
17.所述安装体设计为实心结构,结构的强度和刚度较大,能够减少所述磁场传感器的位移和变形,提高标定精度,且也更加便于加工制造。
18.所述安装体设计为框梁结构,第一,可以提高结构强度和刚度,减少所述磁场传感器的位移和变形,提高标定精度;第二,增加了所述磁场传感器的安装空间,从而能够在所述安装体上设置更多的所述磁场传感器,也能够提高标定精度;第三,形成了部分挖空的区域,从而便于布线。
19.作为本发明的优选方案,所述安装体为正多面体或球体或圆柱体。将所述安装体设计为规则结构,便于确定每个磁场传感器的摆放位置和摆放角度,减少计算工作量。
20.作为本发明的优选方案,所述安装体为塑料结构件(如abs、peek、pvm、tpu等)、木材结构件、石材结构件等,此时,刚度较大,受温度影响较小,标定精度较高。尽量选用磁导率接近于空气的固态材料制作安装体,能够减少对磁场的干扰。
21.本发明还公开了一种磁场生成器标定方法,包括以下步骤:
22.步骤一:在磁场生成器的一侧放置任一所述的一种磁场生成器标定装置,所述磁场生成器与所述磁场传感器之间的距离大于10倍的所述磁场生成器的自身尺寸,
23.步骤二:根据所述磁场传感器的三维空间位置和摆放角度,得到归一化的第i个所述磁场传感器朝向的方向向量
[0024][0025][0026][0027][0028]
式中,(xi,yi,zi)为第i个磁场传感器的三维空间位置,(αi,βi)为第i个磁场传感器的俯仰角和方向角,i=1,2,3,...,n,n≥6,
[0029]
步骤三:计算所述磁场生成器生成磁场作用于第i个所述磁场传感器上产生的信号量voli,
[0030]
[0031][0032][0033][0034][0035][0036]
式中,(x,y,z)为所述磁场生成器的三维空间位置,(α,β)为所述磁场生成器的俯仰角和方向角,η为增益系数,
[0037]
步骤四:联立组成超定方程组,
[0038][0039]
进行求解,得到未知量(x,y,z,α,β,η)的取值。
[0040]
采用本发明所述的标定方法,可以对磁场生成器进行快速标定,且标定方法简单,标定精度高。
[0041]
作为本发明的优选方案,采用lm(levenberg-marquardt)算法或其改进型对所述超定方程组进行求解,一般可在3~8次迭代内获得收敛。
[0042]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0043]
1、本发明设计了一种磁场生成器标定装置,标定装置为安装有多个已知相对位置磁场传感器的立体装置,标定装置用于确定磁场生成器的摆放位置和摆放方向,进而可以解决现有磁场生成器存在空间不同位置定位精度不同的问题,从而能够进一步优化所述磁场生成器,更加符合医疗领域的使用需求。
[0044]
2、本发明通过设置安装体结构,便于所述磁场传感器的集成安装,且便于获取所述磁场传感器的三维空间位置和摆放角度,进而简化了后续的标定计算。
[0045]
3、采用本发明所述的标定方法,可以对磁场生成器进行快速标定,且标定方法简单,标定精度高。
附图说明
[0046]
图1是本发明所述的磁场生成器标定装置的结构示意图。
[0047]
图2是本发明所述的磁场传感器的摆放角度的示意图。
[0048]
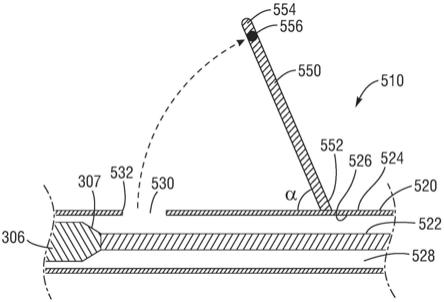
图3是本发明利用标定装置进行标定的示意图。
[0049]
图标:1-标定装置,11-安装体,12-磁场传感器,13-插孔,14-挖空区域,2-磁场发生器,21-磁场生成器组,22-磁场生成器。
具体实施方式
[0050]
下面结合附图,对本发明作详细的说明。
[0051]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
[0052]
实施例1
[0053]
如图1所示,一种磁场生成器标定装置,包括安装体11,在本实施例中所述安装体11为正六面体。所述安装体11的六个面均开设有多个插孔13,在本实施例中每个面均开设有9个插孔13。所述插孔13可以水平设置、竖直设置或倾斜任意角度设置,在本实施例中所述插孔13均垂直于所在面设置,从而便于计算所述插孔13的摆放位置和摆放角度,所述摆放角度包括俯仰角和方向角。在所述插孔13内放置有磁场传感器12,所述插孔13的形状尺寸基本与所述磁场传感器12相一致,从而便于通过所述插孔13的位置确定所述磁场传感器12的位置。所述磁场传感器12通过环氧树脂封装于所述插孔13内,所述插孔13和所述磁场传感器12的数量均不少于6个,优选的,不少于15个。所述插孔13的摆放位置和摆放角度已知,从而所述磁场传感器12的摆放位置和摆放角度已知,所述磁场传感器12的俯仰角和方向角如图2所示。以磁场传感器12的中心轴为x轴,构建直角坐标系,则磁场传感器12的姿态角包括俯仰角(磁场传感器12与z轴的夹角)和两个方向角(磁场传感器12与x轴的夹角、磁场传感器12与y轴的夹角),而由于磁场传感器12为励磁线圈,励磁线圈为旋转体结构,无需考虑其绕自身中心轴(x轴)的方向角,因此,本发明所述的方向角特指磁场传感器12与y轴的夹角。
[0054]
作为优选方案,所述磁场传感器12具有多个俯仰角和多个方向角,相适配的,所述插孔13具有多个俯仰角和多个方向角,从而能够提高标定精度。
[0055]
进一步,本实施例中,所述安装体11设计为框梁结构,每个面上均设有挖空区域14,本实施例中,在所述安装体11的每个面均设置4个挖空区域14。所述安装体11设计为框梁结构,第一,可以提高结构强度和刚度,减少所述磁场传感器12的位移和变形,提高标定精度;第二,增加了所述磁场传感器12的安装空间(可安装于梁上),从而能够在所述安装体11上设置更多的所述磁场传感器12,也能够提高标定精度;第三,形成了多个挖空区域14,从而便于布线。
[0056]
进一步,本实施例中,所述安装体11为塑料结构件、木材结构件、石材结构件等,选用磁导率接近于空气的固态材料制作安装体11,能够减少对磁场的干扰。
[0057]
实施例2
[0058]
一种磁场生成器标定方法,包括以下步骤:
[0059]
步骤一:如图3所示,在磁场发生器2的一侧放置如实施例1所述的一种磁场生成器标定装置1。在本实施例中,将所述标定装置1放置在所述磁场发生器2的上方。所述磁场发生器2包括4个磁场生成器组21,每个所述磁场生成器组21包括三个所述磁场生成器22,三个所述磁场生成器22摆放位置彼此正交。
[0060]
所述磁场生成器22与所述磁场传感器12之间的距离大于10倍的所述磁场生成器22的自身尺寸,即磁场生成器22与跟踪磁场传感器12相距远大于磁场生成器22自身尺寸,可将二者视为磁偶极子。
[0061]
步骤二:根据毕奥-萨伐尔定律(biot-savart law),定位原理详述如下。根据所述磁场传感器12的三维空间位置和摆放角度,得到归一化的第i个所述磁场传感器12朝向的方向向量
[0062][0063][0064][0065][0066]
式中,(xi,yi,zi)为第i个磁场传感器12的三维空间位置,(αi,βi)为第i个磁场传感器12的俯仰角和方向角,i=1,2,3,...,n,n≥6,
[0067]
步骤三:计算所述磁场生成器22生成磁场作用于第i个所述磁场传感器12上产生的信号量voli,
[0068][0069][0070][0071][0072][0073][0074]
式中,(x,y,z)为所述磁场生成器22的三维空间位置,(α,β)为所述磁场生成器22的俯仰角和方向角,η为增益系数,
[0075]
步骤四:联立组成超定方程组,
[0076][0077]
进行求解,得到未知量(x,y,z,α,β,η)的取值,即获得所述磁场生成器22的三维空间位置、摆放角度和增益系数。
[0078]
例如在本实施例中,标定装置1每个面上安装有9个磁场传感器12,6个面共计54个磁场传感器12,可以获得包含6个未知量(x,y,z,α,β,η)的54个方程,联立54个方程组成超定方程组。
[0079]
求解超定方程组问题实则是非线性模型求解问题,可以按照一定筛选准则挑选出其中部分(大于或等于6个)或全部方程联立求解,常用求解方法是lm(levenberg-marquardt)算法或其改进型,本实施例采用其改进型,在3~8次迭代内获得收敛。
[0080]
而多个所述磁场生成器22产生的磁场,可通过频率或导通时间的不同进行区分。例如可设置成频率正交,再正交解调。
[0081]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。