1.本技术涉及智能医疗技术领域,特别涉及一种脉搏波测量装置及其脉搏波测量方法、系统和介质。
背景技术:
2.心脑血管疾病是目前我国最常见的慢性疾病,其中动脉僵硬度的增加被发现与多种疾病相关,包括冠心病、致命性卒中、充血性心力衰竭、中度慢性肾病、类风湿性关节炎、系统性血管炎、系统性红斑狼疮等。
3.脉搏波是心脏的收缩舒张沿动脉血管通过血液流动向外周传播而形成的。目前pwv(pulse wave velocity,脉搏波传导速度),特别是主动脉pwv,如cfpwv(catroid-femoral arterypulse wave velocity,颈动脉-股动脉脉搏波传导速度),作为动脉僵硬度指标已经获得大量临床验证。因此pwv的测量可以实现对动脉硬化等心血管疾病的早期筛查,从而有效降低动脉硬化相关疾病的发病和死亡。
4.但是,测量cfpwv需要在医院进行,并且测量过程无法独自完成,要求测量人员具备一定的经验和专业知识。因此,急需一种便捷、准确的动脉僵硬度检测的方法,能够有助于人们更好的了解自身心血管健康状况,同时有效降低动脉硬化带来的相关健康风险。
技术实现要素:
5.本技术实施例提供一种脉搏波测量装置及其脉搏波测量方法、系统和介质,能够便捷地测量脉搏波。
6.本技术的第一方面提供了一种脉搏波测量装置,包括:第一设备,第一设备包括至少一个脉搏波传感器,用于在用户的第一位置通过脉搏波传感器测量第一脉搏波,得到第一脉搏波信号;第二设备,与第一设备无线通信,第二设备包括至少一个脉搏波传感器,用于在用户的第二位置通过脉搏波传感器测量第二脉搏波,得到第二脉搏波信号,并根据第二脉搏波信号和从第一设备接收的第一脉搏波信号计算脉搏波传导速度。
7.在上述第一方面的一种可能的实现中,第一设备和第二设备可拆卸连接。
8.该脉搏波测量装置不同于医院内现有的脉搏波测量装置,脉搏波测量装置可以由可拆卸的第一设备和第二设备组成。用户单独就可以将第一设备和第二设备分别设置于自身的第一位置和第二位置,通过第一设备和第二设备上设置的脉搏波传感器进行脉搏波测量,提高了脉搏波测量的便利性。这里,第一设备和第二设备上可以设置的脉搏波传感器的数量可以大于一个,例如,可以在第一设备上设置两个脉搏波传感器形成脉搏波传感器的阵列。
9.该脉搏波测量装置可以是一种电子设备,例如:智能手表,第一设备和第二设备可以是智能手表的表盘和底座。表盘和底座上分别设置有属于脉搏波传感器的ppg传感器。用户可以将表盘和底座拆卸后,分别放置于用户的第一位置和第二位置,通过ppg传感器进行ppg检测,获取第一位置和第二位置的ppg信号。从ppg信号中分别获取第一位置和第二位置
的第一脉搏波信号和第二脉搏波信号。最后,根据第一脉搏波信号和第二脉搏波信号计算用户的脉搏波传导速度。
10.在上述第一方面的一种可能的实现中,脉搏波测量装置为智能手环或者智能手表。
11.在该装置是智能手环的情况下,第一设备和第二设备可以是智能手环的表带和本体。
12.在上述第一方面的一种可能的实现中,第一设备为脉搏波测量装置的底座部分,第二设备为脉搏波测量装置的表盘部分。
13.在上述第一方面的一种可能的实现中,第一设备为智能手环或者智能手表,第二设备为耳机。
14.用户可以通过佩戴智能手表以及佩戴耳机,通过智能手表和耳机中分别设置的脉搏波传感器测量用户的第一位置和第二位置的第一脉搏波信号和第二脉搏波信号。
15.在上述第一方面的一种可能的实现中,脉搏波传感器包括光电式脉搏波传感器、压电式脉搏波传感器、压阻式脉搏波传感器中的至少一种。
16.在上述第一方面的一种可能的实现中,第二设备根据第一脉搏波信号和第二脉搏波信号计算用户的第一位置和用户的第二位置的脉搏波的时间差,并将用户血液流经第一位置和第二位置的距离差与时间差之间的比值作为脉搏波传导速度。
17.在该装置中,第一设备和第二设备在同一个测量时长内分别检测第一脉搏波信号和第二脉搏波信号。并计算出测量到的第一脉搏波信号和第二脉搏波信号之间的时间差,同时,第一设备和第二设备还计算出第一位置和第二位置的距离差,将距离差和时间差的比值作为脉搏波传导速度。
18.在上述第一方面的一种可能的实现中,在第一脉搏波信号和第二脉搏波信号中的至少一个小于信号阈值的情况下,第一设备和第二设备重新测量第一脉搏波信号和第二脉搏波信号。
19.在该装置中,在获取的第一脉搏波信号和第二脉搏波信号小于信号阈值,也就是信号不佳的情况下,第一设备和第二设备重新进行第一脉搏波信号和第二脉搏波信号检测。
20.在上述第一方面的一种可能的实现中,第二设备根据第一脉搏波信号和第二脉搏波信号计算用户的第一位置和用户的第二位置的脉搏波的时间差,包括:
21.第二设备获取第一脉搏波信号和第二脉搏波信号对应的第一波形图和第二波形图;
22.第二设备将第一波形图和第二波形图设置在横轴为测量时长的坐标系中,第一波形图和第二波形图分别包括多个波谷;
23.第二设备获取第一波形图和第二波形图中多对位置相同的波谷;
24.第二设备基于测量时长计算出各对波谷的底点之间的时间差;
25.将各对波谷的时间差的平均值作为用户的第一位置和用户的第二位置的脉搏波的时间差。
26.在该装置中,将获取的第一脉搏波信号和第二脉搏波信号以波形图的形式表示,并将上述的波形图设置于以测量时长为横轴的坐标系中。第一脉搏波信号和第二脉搏波信
号的波形图分别包括至少一个波谷,通过计算两个波形图中相同位置的波谷的底点在坐标系的横轴之间的距离,计算出波谷的底点之间的时间差。
27.在上述第一方面的一种可能的实现中,第一设备和第二设备均包括测距传感器,用于测量用户血液流经第一位置和第二位置的距离差。
28.在上述第一方面的一种可能的实现中,测量用户的第一位置和用户的第二位置距离差,包括:
29.第一设备的测距传感器向第二设备的测距传感器发出超声波并开始计算传导时间;
30.在第一设备接收到经过第二设备反射后的超声波后,第一设备结束计算传导时间;
31.基于超声波的传导速度和传导时间计算出第一位置和第二位置之间的距离差。
32.在上述第一方面的一种可能的实现中,第一设备和第二设备通过红外测距的方式测量距离差。
33.在上述第一方面的一种可能的实现中,距离差是测量历史脉搏波传导速度时所用到的距离差。
34.由于用户的距离差通常不会发生很大的变化,在该装置中,保存有用户进行脉搏波测量的距离差的历史数据,在用户再次进行脉搏波测量时,可以直接使用距离差的历史数据。
35.在上述第一方面的一种可能的实现中,根据用户性别,年龄,身高以及体重计算出用户的第一位置和用户的第二位置之间的距离差。
36.本技术的第二方面提供了一种脉搏波测量方法,通过脉搏波测量装置进行脉搏波测量,其中,脉搏波测量装置包括第一设备和第二设备,第二设备与第一设备能够无线通信;
37.方法包括:
38.获取位于用户的第一位置的第一设备的脉搏波传感器测量到的第一脉搏波信号、和位于用户的第二位置的第二设备的脉搏波传感器测量到的第二脉搏波信号;
39.根据第二脉搏波信号和从第一设备接收的第一脉搏波信号计算脉搏波传导速度。
40.本技术的第三方面提供了一种用于脉搏波测量的系统,包括:
41.第一设备,第一设备包括至少一个脉搏波传感器,用于在用户的第一位置通过脉搏波传感器测量第一脉搏波,得到第一脉搏波信号;
42.第二设备,与第一设备无线通信,第一设备包括至少一个脉搏波传感器,用于在用户的第二位置通过脉搏波传感器测量第二脉搏波,得到第二脉搏波信号;
43.以及服务器,服务器根据第二脉搏波信号和从第一设备接收的第一脉搏波信号计算脉搏波传导速度。
44.本技术的第四方面提供了一种计算机可读介质,计算机可读介质上存储有指令,该指令在计算机上执行时使计算机执行本技术的第二方面的脉搏波测量方法。
45.本技术的第五方面提供了一种脉搏波测量装置,包括:
46.包括至少一个脉搏波传感器的第一设备,用于在用户的第一位置通过脉搏波传感器测量第一脉搏波,得到第一脉搏波信号;
47.与第一设备无线通信的第二设备,包括
48.至少一个脉搏波传感器,用于在用户的第二位置通过脉搏波传感器测量第二脉搏波,得到第二脉搏波信号、
49.存储器,存储有指令、以及
50.至少一个处理器,被配置为访问存储器,并被配置为执行存储器上的指令以控制第一设备和第二设备分别得到第一脉搏波信和第二脉搏波信号,并根据第二脉搏波信号和从第一设备接收的第一脉搏波信号计算脉搏波传导速度。
附图说明
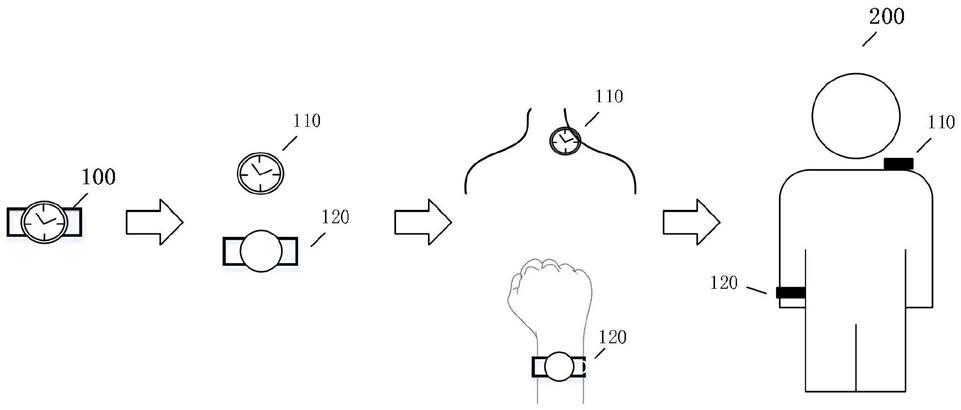
51.图1根据本技术的一些实施例,示出了一种通过本技术提供的脉搏波测量方法进行脉搏波测量的场景;
52.图2根据本技术的一些实施例,示出了一种本技术涉及的智能手表的硬件结构示意图;
53.图3根据本技术的一些实施例,示出了一种主动脉的脉搏波测量的流程图;
54.图4a根据本技术的一些实施例,示出了根据图3测量到的脉搏波的波形图;
55.图4b根据本技术的一些实施例,示出了图3的主动脉的脉搏波测量的场景图;
56.图5根据本技术的一些实施例,示出了一种主动脉的脉搏波测量的流程图;
57.图6根据本技术的一些实施例,示出了图5的主动脉的脉搏波测量的场景图;
58.图7根据本技术的一些实施例,示出了另一种主动脉的脉搏波测量的场景图;
59.图8根据本技术的一些实施例,示出了一种电子设备的结构示意图。
具体实施方式
60.下面通过附图和实施例,对本技术实施例的技术方案做进一步的详细描述。
61.如上所述,为了提供一种便捷的动脉僵硬度检测的方法,本技术的实施例公开了一种脉搏波测量方法,通过将两个分别搭载脉搏波传感器的器件放置在人体的两个不同的测量部位进行检测,获得预定时长内该测量部位的脉搏波信号,然后,根据脉搏波信号确定血液从心脏传输到人体的两个测量部位的时间差,然后再根据两个测量部位的距离差和确定的时间差的比值,来计算人体的主动脉pwv。
62.上述两个不同的器件,可以是一个电子设备的两个部件,例如,智能手表的表盘和底座、智能手表的主体和智能手表上附加设置的一组脉搏波传感器附件;也可以是相互独立的两个不同的电子设备,例如,具有脉搏波传感器的智能手表和具有脉搏波传感器的智能耳机。
63.下面以脉搏波传感器为ppg传感器(photo plethysmograph,光电体积描记)以及同一电子设备的不同部件测量人体的不同部位为例来说明本技术实施例的脉搏波的测量方法。
64.图1根据本技术的实施例,提供了一种脉搏波测量方法的场景图。如图1所示,该应用场景包括:电子设备100、待测量对象200。
65.其中,电子设备100包括可拆分的测量部件110和测量部件120,每个测量部件包含至少一个ppg传感器以及测距传感器。将测量部件110和测量部件120分别放置于待测量对
象200的不同测量部位,测量一定时长后得到两个不同部位的ppg信号。之后,电子设备100根据得到的ppg信号计算出两个测量部位的两个脉搏波的传导时间差δt;同时,电子设备100通过测距传感器测量出第一测量部件和第二测量部件之间的竖直距离δl,作为上述两个脉搏波的ppg信号传导的距离差,通过δl/δt计算出pwv。
66.可以理解,上述的测量部件110和测量部件120可以包括多个ppg传感器,例如,在测量部件110和测量部件120上分别设置有ppg传感器,形成ppg传感器的阵列。
67.上述的ppg传感器是通过光电手段在活体组织中检测血液容积变化的一种脉搏波传感器,这里的血液容积是指单位时间内流经血管的血量。血管内的血液容积在心脏收缩舒张作用下呈波形变化。当心脏收缩时血管内的血液容积量最多,光吸收量也最大,检测到的光强度最小;而在心脏舒张时,正好相反,血管内的血液容积量最少,检测到的光强度最大,通过ppg传感器采集血管内血液容积变化,使ppg传感器检测到的光强度也随之呈波形变化。再将此光强度变化信号转换成ppg信号,计算该ppg信号后便可获得脉搏波的变化。
68.可以理解,本技术提供的电子设备100可以是能够采用本技术提供的主动脉pwv测量进行pwv测量的各种电子设备,包括但不限于手表、手环或者眼镜、头盔、头带等可穿戴电子设备、医疗检测仪器等等。可以理解,电子设备100可以通过主动脉pwv测量装置对待测量对象200进行pwv测量。该主动脉pwv测量装置可以为电子设备100的一部分,也可以为独立于电子设备100的独立装置,可以与电子设备100进行通信连接,以将测量到的待测量对象200的主动脉pwv发送给电子设备100。
69.本技术提供的脉搏波传感器除了可以是ppg传感器,还可以包括压电式、压阻式脉搏传感器等各种能够测量脉搏波的传感器。这里的压电式、压阻式脉搏传感器采用微压力传感材料,如压电片或电桥等,将传感器的探头与动脉搏动较强的地方贴合,施加一定的压力,微压力材料可以将脉搏跳动的压力信号采集到并有电信号变化量产生,经过信号放大与调理电路处理后,可以得到脉搏跳动的完整波形,也可以进一步输出和动脉搏动同步的脉冲信号。
70.本技术的技术方案还可以包括电子设备300,电子设备300可以是能够与电子设备100通信的终端设备,能够帮助电子设备100完成注册、控制电子设备100的固件更新、接收电子设备100的检测数据、协助电子设备100分析测量数据等等。可以理解,电子设备300可以包括但不限于,膝上型计算机、台式计算机、平板计算机、智能手机、服务器、可穿戴设备、头戴式显示器、移动电子邮件设备、便携式游戏机、便携式音乐播放器、阅读器设备、其中嵌入或耦接有一个或多个处理器的电视机、或能够访问网络的其他电子设备。
71.为了便于说明,下文以电子设备100为智能手表100为例,说明本技术的技术方案。
72.图2所示为根据本技术的一些实施例,提供的一种智能手表100的硬件结构示意图。如图2所示,智能手表100包括触摸屏101(又称为触摸面板)、显示屏102、按键103、麦克风104、扬声器105、处理器106和存储器107,麦克风104和扬声器105。智能手表100,还包括,表盘110和底座120,表盘110包括,第一微控制单元(micro control unit,mcu)111、第一无线通信单元112、第一ppg传感器113、第一测距传感器114和电源115。底座120包括,第二微控制单元121、第二无线通信单元122、第二ppg传感器123、第二测距传感器124和电源125。
73.下面分别对手表100的各功能组件进行介绍:
74.触摸屏101,也可以成为触控面板,可以收集用户在其上的触摸操作(比如用户使
用手指、触笔等任何适合的物体或者附件在触控面板上或者在触控面板附近的操作),并根据预先设定的程式驱动响应的连接装置。
75.显示屏102可以用于显示用户输入的信息或者提供给用户的提示信息。在一些实施例中,触摸屏101可覆盖显示屏102,当触摸屏101检测到在其上或者附近的触摸操作后,传送给处理器103以确定触摸事件的类型,随后处理器103根据触摸事件的类型在显示屏102上提供相应的视觉输出。
76.按键103可以是机械按键。也可以是触摸式按键。当按键103检测到在其上或者附近的按键操作后,传送给处理器103以确定按键操作的类型,
77.处理器106用于进行系统调度,控制触摸屏101、显示屏102、按键103,以及存储器107等。
78.存储器107用于存储软件程序以及各种数据,处理器106通过运行存储在存储器107的软件程序以及数据,执行智能手表100的各种功能应用以及数据处理。例如,在本技术的一些实施例中,存储器107可以存储第一ppg传感器113和第二ppg传感器123测量到的数据或者第一测距传感器114和第二测距传感器124测量到的数据。同时,存储器也可以存储用户的用户信息、以及与用户相关的pwv历史测量数据等等。
79.第一微控制单元111,用于控制第一ppg传感器113,对第一ppg传感器113测量的数据进行运算,与处理器106通信等。第一微控制单元111可以第一ppg传感器113检测用户的脉搏波传导时间,同时第一微控制单元111可以控制第一测距传感器114检测用户的脉搏波传导距离,通过脉搏波传导距离和脉搏波传导时间计算pwv。此外,可以理解,对于ppg数据的上述处理也可以由处理器106完成,在此不做限制。第二微控制单元121实现的功能与第一微控制单元111类似。
80.第一无线通信单元112和第二无线通信单元122,表盘110和底座120之间,以及智能手表100与服务器300通过无线通信单元(如手机、平板电脑等)实现无线通信。在一些实施例中,例如,可以包括无线局域网(wireless local area networks,wlan),(如无线保真(wireless fidelity,wi-fi网络),蓝牙(bluetooth,bt),全球导航卫星系统(global navigation satellite system,gnss),调频(frequency modulation,fm),近距离无线通信技术(near field communication,nfc),红外技术(infrared,ir)等无线通信的解决方案。
81.麦克风104用于接收用户发出的语音,例如,在用户向智能手表100发出“启动pwv测量”的语音后,处理器106识别出该语音并开始测量pwv。
82.扬声器105用于向用户发出提示信息,例如,在开始或者结束pwv测量的时候,向用户发出提示信息。
83.可以理解的是,本技术实施例提供的智能手表100的硬件结构并不构成对智能手表100的具体限定。在本技术另一些实施例中,智能手表100可以包括比图示更多或更少的部件,或者组合某些部件,或者拆分某些部件,或者不同的部件布置。
84.下面结合图3和图4介绍本技术的一种主动脉pwv测量的方法。在该技术方案中,例如,第一测量部位201和第二测量部位202分别为用户的颈部201和手腕202,通过该方法测量出的是crpwv(carotid radial pulse wave velocity,颈动脉-桡动脉脉搏波传导速度),crpwv属于主动脉pwv中的一种。当用户200决定测量自身的crpwv时,将智能手表100的
表盘110和底座120分别放置至在颈部201和手腕202后,使表盘110和底座120处于同一竖直平面内,表盘110和底座120的第一ppg传感器113和第二ppg传感器123分别测量颈部201和手腕202的脉搏波的第一ppg信号和第二ppg信号,智能手表100从第一ppg信号和第二ppg信号中计算出脉搏波传导的时间差δt,同时,智能手表100通过第一测距传感器114和第二测距传感器124获取表盘110和底座120之间的竖直距离δl,该δl是脉搏波的第一ppg信号和第二ppg信号颈部201和手腕202的距离差,最后,智能手表100根据δl/δt计算出crpwv。
85.如图3所示,crpwv测量的过程包括:
86.在用户启动pwv测量之前,用户可以向智能手表100输入用户信息。
87.例如,智能手表100具备用户输入功能,用户通过智能手表100的显示屏102,向智能手表100输入用户信息,这里的用户信息可以包括,用户的年龄、身高、体重、性别以及用户的身份信息等。智能手表100可以根据获取到的用户的身份信息,获取用户的crpwv测量数据。
88.这里的crpwv测量数据可以包括:用户的颈部201和手腕202之间的竖直距离。该竖直距离也就是脉搏波分别传导至颈部201和手腕202的距离差δl,以及用户的crpwv历史测量数据。例如,智能手表100的存储器107中存储有用户的身份信息与用户的crpwv测量数据之间的对应关系,在智能手表100获取了用户输入的身份信息后,智能手表100从存储器107中读取该用户的crpwv测量数据。再如,智能手表100的存储器107内保存了与年龄,身高和体重对应的颈部201和手腕202之间的距离差δl。智能手表100可以根据用户的年龄、身高、体重直接计算出用户的颈部201和手腕202之间的距离差δl,使得用户无需测量该距离差δl。
89.s301:智能手表100检测到用户启动crpwv测量后,智能手表100提示用户将表盘110和底座120分离,分别放置于用户的颈部201和手腕202。
90.例如,用户可以启动智能手表100内安装的pwv测量应用程序,在该pwv测量应用程序启动后,用户选择进行crpwv测量。智能手表100响应与该pwv测量应用程序的执行,提示用户将表盘110和底座120分离,分别放置于用户的颈部201和手腕202。用户可以将智能手表100佩戴在左手的手腕202,用户使用右手将智能手表100的表盘110拆下,将表盘110的贴合皮肤放置于颈部201的颈动脉位置,该位置可以是左肩上方与颈部平行处,使得表盘110的第一ppg传感器113可以测量颈部201的脉搏波的第一ppg信号;同时,智能手表100的底座120的第二ppg传感器123可以测量手腕202的桡动脉的脉搏波的第二ppg信号
91.在本技术的一个实施例中,表盘110的第一ppg传感器113处可以设置有易粘附于皮肤的粘附结构,使得用户将表盘110放置于颈部201的颈动脉位置时,表盘110可以贴合皮肤而不易脱落。
92.s302:智能手表100响应用户发出的ppg信号的测量指令,智能手表100控制表盘110和底座120分别在颈部201和手腕202进行ppg检测。
93.例如,用户使用右手将表盘110放置于颈部201后,再用右手点击表盘110的按键103启动pwv测量,点击该按键103后智能手表100的处理器106响应该点击事件生成一个启动pwv测量的指令,通过设置在表盘110和底座120的第一无线通信单元112和第二无线通信单元122向表盘110和底座120发送该指令,该指令中可以包含一个配置于存储器107中的ppg检测的测量时长,表盘110和底座120接收到该指令后,表盘110的第一微控制单元111和
底座120的第一无线通信单元112根据该测量时长控制第一ppg传感器113和第二ppg传感器123同步开始ppg检测。
94.s303:智能手表100获取颈部201和手腕202的ppg信号
95.表盘110在获取到第一ppg信号后,通过第一无线通信单元112将该第一ppg信号发送给智能手表100,同理,底座120在获取到第二ppg信号后,通过第二无线通信单元122将该第二ppg信号发送给智能手表100。
96.在本技术的另一实施例中,用户也可以通过与智能手表100交互,使表盘110和底座120启动pwv测量。例如,用户发出“测量ppg信号”后,智能手表100通过麦克风104接收该语音,在识别出该语音后启动pwv测量,或是,表盘110的触摸屏101上设置有启动pwv测量的触摸按钮,用户通过点击或滑动等方式触控该按钮以启动pwv测量。
97.s304:智能手表100检测表盘110和底座120测量的颈部201和手腕202的ppg信号是否符合信号阈值,如果符合,则继续至s305;否则,智能手表100提示用户重新开始ppg检测,在用户确认重新测量后,重新开始至s302。
98.例如,智能手表100可以在存储器107中保存有ppg信号的信号阈值ppg,该信号阈值可以是ppg信号的频率(最高频率220hz,最低40hz)。在智能手表100接收到第一ppg信号和第二ppg信号后,该智能手表100通过判断第一ppg信号和第二ppg信号的频率是否大于或者小于信号阈值,来确认表盘110和底座120测量到的第一ppg信号和第二ppg信号是否符合信号阈值。在不符合的情况下,智能手表100可以通过震动传感器发出振动,提示用户重新开始测量。如果符合,智能手表100也可以提示用户ppg信号测量完成,进入s305,进行pwv计算。在一些实施例中,智能手表100可以通过扬声器105发出“请重新检测”的语音,提示用户重新开始测量。
99.s305:智能手表100基于测量的ppg信号计算脉搏波传导的时间差δt
100.例如,如图4a所述,智能手表100获取表盘110和底座120在测量时长内的颈部201的第一ppg信号和手腕202的第二ppg信号,将第一ppg信号和第二ppg信号转化为第一波形图和第二波形图。将第一和第二波形图设置在横轴为测量时长的坐标系中。之后,智能手表100分别获取第一波形图中的第一波谷和第二波形图中的第一波谷,分别获取这一对波谷的底点坐标,计算该对波谷的底点之间基于横轴的距离,也就是颈部201和手腕202处的该对波谷的底点之间的时间差δt1。以此类推,接着计算第一波形图中的第二波谷和第二波形图中的第二波谷的底点之间的时间差δt2。在图4中,第一波形图和第二波形图中包括4对波谷,其对应的时间差分别为δt1、δt2、δt3和δt4,最后取所有时间差的平均值,计算出脉搏波传导的时间差δt。
101.s306:智能手表100检测是否测量颈部201和手腕202之间的脉搏波传导的距离差,如果是,则继续至s308,进行测量脉搏波传导的距离差;否则,继续至s307,智能手表100根据用户信息获取用户的脉搏波传导的距离差。
102.例如,智能手表100通过用户信息查询用户是否进行过测量脉搏波传导的距离差。若智能手表100的存储器107内保存有用户测量过的脉搏波传导距离差的历史数据,同时,用户信息中的用户年龄为30岁,则智能手表100判断该用户属于成年人,因此脉搏波传导的距离差不会发生较大的变化,则智能手表100继续至s307直接读取存储器107中保存的脉搏波传导的距离差。
103.若用户未进行过测量脉搏波传导的距离差,则智能手表100发出提示信息提示用户是否测量脉搏波传导的距离差,该提示信息可以显示在智能手表100的显示屏102上,提示信息的内容可以是提示用户进行测量可以更准确的获得脉搏波传导速度。
104.在另一实施例中,智能手表100的存储器107中可以配置测量时间阈值,如果智能手表100检测到当前时间与存储器107中存储的该用户的crpwv历史测量数据的时间之间的时间间隔(当前时间和历史测量数据的时间之间的差值)大于该测量时间阈值(如180天),则智能手表100可以通过扬声器105发出提示语音,建议用户重新测量脉搏波传导的距离差。
105.s307:智能手表100根据用户信息获取用户的脉搏波传导的距离差
106.若用户选择不重新测量脉搏波传导的距离差,智能手表100还可以则读取用户身高信息,带入人体的脉搏波距离差模型估算距离差。
107.这里的人体的脉搏波距离差模型可以卷积神经网络模型等各种类型的神经网络模型,其中,该模型的输入层可以包括人的年龄、身高、体重、性别以及测量pwv的类型,该模型的输出层可以是脉搏波传导的距离差。在本发明的实施例中,该人体的脉搏波距离差模型可以是预先训练好的,其训练过程可以包括:将人的年龄、身高、体重、性别以及测量pwv的类型(如:crpwv)输入神经网络模型,然后将模型的输出(脉搏波传导的距离差)和实际测量的脉搏波传导的距离差进行比较,求出误差,根据该误差来更新神经网络模型的权重。直至最后模型输出表征脉搏波传导的距离差的数据时,认为模型训练完成。
108.在本技术的另一个实施例中,人体的脉搏波距离差模型还可以是决策树、线性回归这一类的机器学习模型。以人体的脉搏波距离差模型是决策树为例,可以将人的年龄、身高、体重、性别以及测量pwv的类型配置为该决策树不同分枝,通过输入的人的年龄、身高、体重、性别以及测量pwv的类型对应的概率计算出相对应的脉搏波距离差。
109.若用户选择重新进行测量脉搏波传导的距离差,则进入s307。
110.s308:智能手表100测量脉搏波传导的距离差
111.智能手表100根据表盘110和底座120的位置,向用户发出提示语音,提示用户持续保持一个测量姿势,使得设置于表盘110和底座120的第一测距传感器114和第二测距传感器124完成测量脉搏波传导的距离差。例如,如图4b所示,在表盘110和底座120分别设置于颈部201和手腕202的情况下,智能手表100提示用户将佩戴底座120的左手竖直向上举起,使得底座与表盘110位于同一竖直平面内,之后,用户通过右手按下表盘110的侧键触发表盘110和底座120之间通过第一测距传感器114和第二测距传感器124测量距离差,在测量完成时,智能手表100可以向用户发出提示,用户可以结束测量姿势。
112.上述的测量表盘110和底座120之间的距离差可以是第一测距传感器114和第二测距传感器124之间通过超声波测距的方式实现的。例如,通过第一测距传感器114向第二测距传感器124发射超声波,第一测距传感器114在发射时刻的同时开始计时,超声波在空气中传播时碰到第二测距传感器124就立即返回来,第一测距传感器114收到反射波就立即停止计时。第一测距传感器114获取上述超声波往返的时间后,通过超声波在空气中的传播速度,可以求得第一测距传感器114和第二测距传感器124之间的竖直距离。该竖直距离也就是脉搏波传导的距离差δl。第一测距传感器114将脉搏波传导的距离差δl通过第一无线通信单元112发送给智能手表100。
113.在本技术的另一个实施例中,第一测距传感器114和第二测距传感器124之间可以通过红外线测距的方式测量表盘110和底座120之间的竖直距离。以红外线测距为例,第一测距传感器114发出红外线,同时,第二测距传感器124接受到该红外线,再根据红外线从发出到被接受到的时间及红外线的传播速度就可以算出第一测距传感器114和第二测距传感器124之间的距离,该距离可以作为脉搏波传导的距离差δl。
114.可以理解,第一测距传感器114和第二测距传感器124之间的竖直距离,也就是脉搏波传导的距离差,也可以是由第二测距传感器124发起测量后获得的。
115.s309:智能手表100通过δl/δt计算出颈部201和手腕202之间的crpwv。
116.例如,测量的主动脉crpwv主要利用脉搏波传导的距离差除以脉搏波传导的时间差从而获得crpwv。其计算原理如下式所示:
[0117][0118]
根据图3的描述,s305至s307中描述的智能手表100测量脉搏波传导的距离差的过程是在s302:表盘110和底座120分别测量颈部201和手腕202的ppg信号之后,由智能手表100执行,但在本发明的另一实施例中,s305至s307中描述的过程可以在s302之前执行。两者之间并没有先后执行的关系。
[0119]
在本技术的一些实施例中,用户还可以将智能手表100佩戴在右手的手腕,将表盘110放置于右肩的颈动脉处,通过测量传导到右手的手腕以及右肩的颈动脉的ppg信号来计算crpwv。
[0120]
在本技术的另一些实施例中,智能手表100可以包括底座和可拆卸ppg测量装置,该可拆卸ppg测量装置并不限于智能手表100的表盘,可以是任何与智能手表100结合成一体,并且具有ppg传感器可以测量ppg信号的装置。
[0121]
智能手表100还可以与服务器300进行通信,智能手表100的表盘110和底座120在测量传导到颈部201的ppg信号和手腕202的ppg信号后,将两个ppg信号发送给服务器300,服务器300同个上述两个ppg信号计算出脉搏波传导的时间差δt。
[0122]
下面结合图5介绍本技术的另一种主动脉pwv测量的方法。与图3所描述的主动脉pwv测量的方法的不同处在于,在该技术方案中,第一测量部位201和第二测量部位202分别为脚踝201和手腕202,通过图5的方法测量出的是rapwv(radial ankle pulse wave velocity,桡动脉-踝关节脉搏波传导速度)。
[0123]
用户200将智能手表100佩戴在脚踝202后拆下表盘110将表盘110放置于手腕201,使得表盘110和底座120分别放置至在手腕201和脚踝202。智能手表100通过表盘110的第一ppg传感器113和底座120的第二ppg传感器123分别测量手腕201和脚踝202的脉搏波第一ppg信号和第二ppg信号,从中计算出脉搏波传导的时间差δt,同时,智能手表100通过第一测距传感器114和第二测距传感器124获取脉搏波传导的距离差δl,根据δl/δt计算出rapwv。
[0124]
如图5所示,该rapwv测量的过程包括:
[0125]
与图3中s301不同之处在于,s501:智能手表100检测到用户启动rapwv测量后,智能手表100提示用户将表盘110和底座120分离后,分别放置于用户的手腕201和脚踝202。
[0126]
例如,用户将智能手表100佩戴在右手的脚踝202,使得表盘110位于右脚的脚踝
202的踝关节动脉位置,该位置可以是右脚的脚踝202的内测。同时,用户使用左手将智能手表100的表盘110拆下,将表盘110的贴合皮肤放置于右手的手腕201的桡动脉位置,使得表盘110的第一ppg传感器113可以测量脚踝202的脉搏波的ppg信号。
[0127]
s502至s506所描述的测量过程与图3中描述的测量过程相同。
[0128]
s502:智能手表100响应用户发出的ppg信号的测量指令,表盘110和底座120分别在手腕201和脚踝202进行ppg检测。
[0129]
例如,用户在将表盘110佩戴在右脚的脚踝202后,左手点击表盘100的按键103启动pwv测量,点击该按键后智能手表100的处理器106向表盘110和底座120发出启动pwv测量的指令,该指令使得表盘110和底座120在一个测量时长内在手腕201和脚踝202进行ppg检测,并获得两者的ppg信号。
[0130]
s503:智能手表100检测表盘110和底座120测量手腕201和脚踝202的ppg信号是否符合信号阈值,如果符合,则继续至s505;否则,智能手表100提示用户重新开始测量,重新开始至s502。
[0131]
s504:智能手表100基于测量的ppg信号计算脉搏波传导的时间差δt
[0132]
例如,智能手表100获取在测量时长内的手腕201的第一ppg信号和脚踝202的第二ppg信号,并将第一ppg信号和第二ppg信号转化为第一波形图和第二波形图。接着,通过计算第一波形图和第二波形图中波谷的底点之间的时间差的平均值,计算出脉搏波传导的时间差δt。
[0133]
s505:智能手表100测量脉搏波传导的距离差
[0134]
例如,如图6所示,在表盘110和底座120分别设置于手腕201和脚踝202的情况下,智能手表100提示用户右手下垂并保持垂直站立,使得表盘110与底座120位于同一竖直平面内,之后,用户通过左手手按下表盘110的侧键触发表盘110和底座120之间通过第一测距传感器114和第二测距传感器124测量距离差,在测量完成时,智能手表100可以向用户发出提示,用户可以结束上述的测量姿势。
[0135]
s506:智能手表100通过δl/δt计算出脚踝202和手腕201之间的rapwv。
[0136]
例如,测量的主动脉rapwv主要利用脉搏波传导的距离差除以脉搏波传导的时间差从而获得rapwv。其计算原理如下式所示:
[0137][0138]
在本技术的另一个实施例中,第一测量部位201和第二测量部位202分别为颈部201和脚踝202,该实施例测量出的是capwv(carotid ankle pulse wave velocity,颈动脉-踝关节脉搏波传导速度)。与图3和图5不同之处在于,放置于颈部201的智能手表100的表盘110和佩戴在脚踝202的智能手表100的底座120之间的距离,是通过人声测距的方法获得的。人声测距的方法,是指利用用户发出的语音到达表盘110和底座120的时间差乘上语音的传播速度计算表盘110和底座120之间的距离。例如,在智能手表100提示用户进行脉搏波传导的距离差的时候,用户发出“请检测”的语音,这时,位于表盘110和底座120的麦克风分别接收到用户发出的语音,表盘110和底座120的第一测距传感器114和第二测距传感器124通过麦克风分别接收到的用户发出的语音的时间差乘以语音在空气中的传播速度(如:340m/s)计算出表盘110和底座120之间的距离,该距离就是颈动脉-踝关节脉搏波的距离
差。
[0139]
下面结合图7以电子设备100为智能手表100介绍本技术的另一种主动脉pwv测量的方法。与图3和图5所描述的方法不同的是,在该方法中,智能手表100可以结合智能耳机400进行crpwv测量。在该技术方案中,第一测量部位201和第二测量部位202分别为颈部201和手腕202。
[0140]
用户200将智能手表100佩戴在手腕202,同时佩戴智能耳机400。智能耳机400和智能手表100分别通过自身的ppg传感器,测量颈部201和手腕202的脉搏波的第一ppg信号和第二ppg信号后,智能耳机400将第一ppg信号发送给智能手表100,智能手表100从第一ppg信号和第二ppg信号中计算出脉搏波传导的时间差δt;之后,智能手表100和智能耳机400分别通过自身的测距传感器获取脉搏波传导的距离差δl,根据δl/δt计算出crpwv。
[0141]
上述crpwv测量的过程包括:
[0142]
与图3中s301不同之处在于,s701:s501:智能手表100检测到用户启动crpwv测量后,智能手表100提示用户同时佩戴智能手表100和智能耳机400。
[0143]
例如,智能手表100提示用户将智能手表100佩戴在左手的手腕202,使得智能手表100的ppg传感器可以获取手腕202的桡动脉的脉搏波的第二ppg信号,同时,用户通过智能耳机400的ppg传感器可以获取颈部201的颈动脉的脉搏波的第一ppg信号。这里也可以是智能耳机400提示用户进行上述操作。
[0144]
s702至s706所描述的测量过程与图3中描述的测量过程相同。
[0145]
s702:智能手表100和智能耳机400响应用户发出的ppg信号的测量指令,智能耳机400和智能手表100分别在颈部201和手腕202进行ppg检测。
[0146]
例如,用户使用右手点击智能手表100的按键103启动pwv测量,点击该按键后智能手表100的处理器106同时向智能手表100和智能耳机400发出启动pwv测量的指令,该指令使得智能手表100和智能耳机400在一个测量时长内在颈部201和手腕202进行ppg检测,并获取两者的的第一ppg信号和第二ppg信号。智能耳机400将测量到的颈部201的第一ppg信号的发送给智能手表100。
[0147]
s703:智能手表100检测测量的第一ppg信号和第二ppg信号是否符合信号阈值,如果符合,则继续至s704;否则,智能手表100提示用户重新开始测量,重新开始至s702。
[0148]
s704:智能手表100基于测量的ppg信号计算脉搏波传导的时间差δt
[0149]
例如,智能手表100获取在测量时长内的颈部201的第一ppg信号和手腕202的第二ppg信号,并将第一ppg信号和第二ppg信号转化为第一波形图和第二波形图。接着,通过计算第一波形图和第二波形图中波谷的底点之间的时间差的平均值,计算出脉搏波传导的时间差δt。
[0150]
s705:智能手表100测量脉搏波传导的距离差
[0151]
例如,智能手表100可以采用如图4b中描述的方式,提示用户将佩戴智能手表100的左手竖直向上举起,将智能耳机400贴近颈部201,使得智能手表100与智能耳机400位于同一竖直平面内,之后,用户通过右手按下智能手表100的侧键触发智能手表100与智能耳机400通过各自的测距传感器测量智能手表100与智能耳机400之间的距离差,在测量完成时,智能手表100可以向用户发出提示,用户可以结束上述的测量姿势。
[0152]
s706:智能手表100通过δl/δt计算出脚踝201和手腕202之间的crpwv。
[0153]
例如,测量的主动脉crpwv主要利用脉搏波传导的距离差除以脉搏波传导的时间差从而获得crpwv。其计算原理如下式所示:
[0154][0155]
在本技术的一个实施例中,用户可以通过佩戴两个智能手表来测量主动脉pwv,例如将其中一个智能手表佩戴在手腕,另一个智能手表佩戴在脚踝。本技术的实施例并不限制电子设备的类型,任何可以配置ppg传感器进行ppg信号测量的电子设备都在本技术的保护范围内。
[0156]
在本技术的另一实施例中,智能手表100、智能耳机400还可以与手机500进行通信,手机500控制智能耳机400和智能手表100分别测量颈部201的颈动脉的脉搏波的第一ppg信号和测量手腕202的桡动脉的脉搏波的第二ppg信号。智能耳机400和智能手表100将第一ppg信号、第二ppg信号发送给手机500后,手机500计算出脉搏波传导的时间差δt;同时,手机500控制智能手表100与智能耳机400通过各自的测距传感器测量智能手表100与智能耳机400之间的距离差。手机500也可以直接获取用户测量脉搏波传导的距离差的历史数据;最后,手机500根据脉搏波传导的距离差除以脉搏波传导的时间差获得crpwv。
[0157]
智能耳机400可以是头戴式、颈挂式以及入耳式,本技术的实施例对于智能耳机400的型号不做限定,对于头戴式的智能耳机400,ppg传感器可以设置于智能耳机400的一端,用户可以将设置有ppg传感器的一端贴近颈部进行ppg信号测量。对于颈挂式的智能耳机400,ppg传感器可以设置于智能耳机400的颈挂部件上,用户可以将设置有ppg传感器的颈挂部件贴近颈部进行ppg信号测量。对于入耳式的智能耳机400,ppg传感器可以设置于智能耳机400的左右耳机的任一处,用户可以将设置有ppg传感器的耳机贴近颈部进行ppg信号测量。
[0158]
图8根据本技术的实施例示出了图1所示的电子设备100的一种可能的结构框图。该电子设备100能够执行本技术实施例提供的脉搏波测量方法。具体地,如图1所示,电子设备100可以包括处理器110,外部存储器接口120,内部存储器121,通用串行总线(universal serial bus,usb)接口130,充电管理模块140,电源管理模块141,电池142,天线1,天线2,移动通信模块150,无线通信模块160,音频模块170,扬声器170a,受话器170b,麦克风170c,耳机接口170d,传感器模块180,按键190,马达198,指示器192,摄像头193,显示屏194,以及用户标识模块(subscriber identification module,sim)卡接口195等。其中传感器模块180可以包括压力传感器180a,陀螺仪传感器180b,气压传感器180c,磁传感器180d,加速度传感器180e,距离传感器180f,接近光传感器180g,指纹传感器180h,温度传感器180j,触摸传感器180k,环境光传感器180l,骨传导传感器180m等。
[0159]
可以理解的是,本技术实施例示意的结构并不构成对电子设备100的具体限定。在本技术另一些实施例中,电子设备100可以包括比图示更多或更少的部件,或者组合某些部件,或者拆分某些部件,或者不同的部件布置。图示的部件可以以硬件,软件或软件和硬件的组合实现。
[0160]
处理器110可以包括一个或多个处理单元,例如:处理器110可以包括应用处理器(application processor,ap),调制解调处理器,图形处理器(graphics processing unit,gpu),图像信号处理器(image signal processor,isp),控制器,视频编解码器,数字
信号处理器(digital signal processor,dsp),基带处理器,和/或神经网络处理器(neural-networkprocessing unit,npu)等。其中,不同的处理单元可以是独立的器件,也可以集成在一个或多个处理器中。控制器可以根据指令操作码和时序信号,产生操作控制信号,完成取指令和执行指令的控制。
[0161]
处理器110中还可以设置存储器,用于存储指令和数据。在一些实施例中,处理器110中的存储器为高速缓冲存储器。该存储器可以保存处理器110刚用过或循环使用的指令或数据。如果处理器110需要再次使用该指令或数据,可从所述存储器中直接调用。避免了重复存取,减少了处理器110的等待时间,因而提高了系统的效率。同时,处理器110还可以存储电子设备100从其他电子设备接收到的数据。例如,在本技术的一些实施例中,处理器110可以基于路段地形信息、路段环境信息和路段安全性信息等对多条待选运动路线进行分析,计算出对应于多条待选运动路线中的每一条的总得分,并得出对应于多条待选运动路线中的每一条的优缺点,然后对多条待选运动路线进行排序。
[0162]
在电子设备100是智能手表的情况下,处理器110控制智能手表的表盘和底座分别得到第一脉搏波信和第二脉搏波信号,并根据第二脉搏波信号和从第一设备接收的第一脉搏波信号计算脉搏波传导速度。
[0163]
在一些实施例中,处理器110可以包括一个或多个接口。接口可以包括集成电路(inter-integrated circuit,i2c)接口,集成电路内置音频(inter-integrated circuit sound,i2s)接口,脉冲编码调制(pulse code modulation,pcm)接口,通用异步收发传输器(universal asynchronous receiver/transmitter,uart)接口,移动产业处理器接口(mobile industry processor interface,mipi),通用输入输出(general-purpose input/output,gpio)接口,用户标识模块(subscriber identity module,sim)接口,和/或通用串行总线(universal serial bus,usb)接口、micro usb接口,usb type c接口等。usb接口130可以用于连接充电器为电子设备100充电,也可以用于电子设备100与外围设备之间传输数据。也可以用于连接耳机,通过耳机播放音频。该接口还可以用于连接其他电子设备,例如ar设备等。
[0164]
可以理解的是,本技术实施例示意的各模块间的接口连接关系,只是示意性说明,并不构成对电子设备100的结构限定。在本技术另一些实施例中,电子设备100也可以采用上述实施例中不同的接口连接方式,或多种接口连接方式的组合。
[0165]
充电管理模块140用于从充电器接收充电输入。电源管理模块148用于连接电池142,充电管理模块140与处理器180。电源管理模块148接收电池142和/或充电管理模块140的输入,为处理器180,内部存储器121,显示屏194,摄像头193,和无线通信模块160等供电。电源管理模块148还可以用于监测电池容量,电池循环次数,电池健康状态(漏电,阻抗)等参数。在其他一些实施例中,电源管理模块141也可以设置于处理器180中。在另一些实施例中,电源管理模块141和充电管理模块140也可以设置于同一个器件中。
[0166]
电子设备100的无线通信功能可以通过天线1,天线2,移动通信模块150,无线通信模块160,调制解调处理器以及基带处理器等实现。电子设备100可以通过无线通信模块160与其他电子设备进行无线通信,例如,与可穿戴设备或者服务器进行无线通信。电子设备100可以通过无线通信模块160发送无线信号给服务器,请求服务器进行无线网络业务以处理该可电子设备的具体业务需求(例如请求服务器进行运动路线推荐);电子设备100还可
以通过无线通信模块160从服务器接收推荐的运动路线信息。天线1和天线2用于发射和接收电磁波信号。电子设备100中的每个天线可用于覆盖单个或多个通信频带。不同的天线还可以复用,以提高天线的利用率。例如:可以将天线1复用为无线局域网的分集天线。在另外一些实施例中,天线可以和调谐开关结合使用。
[0167]
移动通信模块150可以提供应用在电子设备100上的包括2g/3g/4g/5g等无线通信的解决方案。电子设备100可以通过移动通信模块150获取用户周边的地图信息。无线通信模块160可以提供应用在电子设备100上的包括无线局域网(wireless local area networks,wlan)(如无线保真(wireless fidelity,wi-fi)网络),蓝牙(bluetooth,bt),全球导航卫星系统(global navigation satellite system,gnss),调频(frequency modulation,fm),近距离无线通信技术(near field communication,nfc),红外技术(infrared,ir)等无线通信的解决方案。无线通信模块160可以是集成至少一个通信处理模块的一个或多个器件。无线通信模块160经由天线2接收电磁波,将电磁波信号调频以及滤波处理,将处理后的信号发送到处理器110。无线通信模块160还可以从处理器110接收待发送的信号,对其进行调频,放大,经天线2转为电磁波辐射出去。
[0168]
在一些实施例中,电子设备100能够通过移动通信模块150或者无线通信模块160与其他电子设备进行通信连接。
[0169]
在一些实施例中,电子设备100的天线1和移动通信模块150耦合,天线2和无线通信模块160耦合,使得电子设备100可以通过无线通信技术与网络以及其他设备通信。所述无线通信技术可以包括全球移动通讯系统(global system for mobile communications,gsm),通用分组无线服务(general packet radio service,gprs),码分多址接入(code division multiple access,cdma),宽带码分多址(wideband code division multiple access,wcdma),时分码分多址(time-division code division multiple access,td-scdma),长期演进(long term evolution,lte),bt,gnss,wlan,nfc,fm,和/或ir技术等。所述gnss可以包括全球卫星定位系统(global positioning system,gps),全球导航卫星系统(global navigation satellite system,glonass),北斗卫星导航系统(bei dou navigation satellite system,bds),准天顶卫星系统(quasi-zenith satellite system,qzss)和/或星基增强系统(satellite based augmentation systems,sbas)。
[0170]
电子设备100通过gpu,显示屏194,以及应用处理器等实现显示功能。gpu为图像处理的微处理器,连接显示屏194和应用处理器。gpu用于执行数学和几何计算,用于图形渲染。处理器110可包括一个或多个gpu,其执行程序指令以生成或改变显示信息。
[0171]
电子设备100可以通过isp,摄像头193,视频编解码器,gpu,显示屏194以及应用处理器等实现拍摄功能。在本技术的一些实施例中,显示屏194用于显示电子设备100自身推荐的运动路线信息,或者从其他电子设备(例如服务器)接收的推荐的运动路线信息(例如推荐的运动路线的排序结果、路线示意图、路线显著优缺点等),以供用户选择个性化的运动路线。
[0172]
外部存储器接口120可以用于连接外部存储卡,例如micro sd卡,实现扩展电子设备100的存储能力。外部存储卡通过外部存储器接口120与处理器110通信,实现数据存储功能。例如将音频,视频等文件保存在外部存储卡中。
[0173]
内部存储器121可以用于存储计算机可执行程序代码,所述可执行程序代码包括
指令。内部存储器121可以包括存储程序区和存储数据区。其中,存储程序区可存储操作系统,至少一个功能所需的应用程序(比如语音导航,图像播放功能等)等。存储数据区可存储电子设备100使用过程中所创建的数据(比如音频数据,电话本等)等。此外,内部存储器121可以包括高速随机存取存储器,还可以包括非易失性存储器,例如至少一个磁盘存储器件,闪存器件,通用闪存存储器(universal flash storage,ufs)等。处理器110通过运行存储在内部存储器121的指令,和/或存储在设置于处理器中的存储器的指令,执行电子设备100的各种功能应用以及数据处理。
[0174]
电子设备100可以通过音频模块170,扬声器170a,受话器170b,麦克风170c,耳机接口170d,以及应用处理器等实现音频功能。例如音乐播放,录音等。
[0175]
按键190包括开机键,音量键等。按键190可以是机械按键。也可以是触摸式按键。电子设备100可以接收按键输入,产生与电子设备100的用户设置以及功能控制有关的键信号输入。
[0176]
马达191可以产生振动提示。马达191可以用于来电振动提示,也可以用于触摸振动反馈。例如,作用于不同应用(例如拍照,音频播放等)的触摸操作,可以对应不同的振动反馈效果。作用于显示屏194不同区域的触摸操作,马达191也可对应不同的振动反馈效果。不同的应用场景(例如:时间提醒,接收信息,闹钟,游戏等)也可以对应不同的振动反馈效果。触摸振动反馈效果还可以支持自定义。
[0177]
指示器192可以是指示灯,可以用于指示充电状态,电量变化,也可以用于指示消息,未接来电,通知等。sim卡接口195用于连接sim卡。
[0178]
在附图中,可以以特定布置和/或顺序示出一些结构或方法特征。然而,应该理解,可能不需要这样的特定布置和/或排序。而是,在一些实施例中,这些特征可以以不同于说明性附图中所示的方式和/或顺序来布置。另外,在特定图中包括结构或方法特征并不意味着暗示在所有实施例中都需要这样的特征,并且在一些实施例中,可以不包括这些特征或者可以与其他特征组合。
[0179]
需要说明的是,本技术各设备实施例中提到的各单元/模块都是逻辑单元/模块,在物理上,一个逻辑单元/模块可以是一个物理单元/模块,也可以是一个物理单元/模块的一部分,还可以以多个物理单元/模块的组合实现,这些逻辑单元/模块本身的物理实现方式并不是最重要的,这些逻辑单元/模块所实现的功能的组合才是解决本技术所提出的技术问题的关键。此外,为了突出本技术的创新部分,本技术上述各设备实施例并没有将与解决本技术所提出的技术问题关系不太密切的单元/模块引入,这并不表明上述设备实施例并不存在其它的单元/模块。
[0180]
需要说明的是,在本专利的示例和说明书中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0181]
虽然通过参照本技术的某些优选实施例,已经对本技术进行了图示和描述,但本
领域的普通技术人员应该明白,可以在形式上和细节上对其作各种改变,而不偏离本技术的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
