1.本发明涉及油田采油设备用的皮带张力恒定保持装置,具体涉及一种智能皮带张力恒定保持装置。
背景技术:
2.抽油机是石油开采的主要采油设备,多数都应用到了皮带传动机构,使用皮带传送动力。而在生产过程中,皮带会由于材料老化、磨损、以及受环境温度的影响,性能会越来越低,造成皮带打滑、传动效率降低,从而降低石油设备的生产效率,因此在生产一段时间后就要调整皮带张力或者更换皮带,使之传动效率最大化。所以调整皮带张力或者更换皮带是采油队的一项常规型的工作,是抽油机日常管理的重要工作之一。
3.随着社会进步,以前主要依靠工人使用撬杠、大锤等工具进行操作,存在着职工劳动强大,操作时间长,安全性差等不利于生产的因素。因此实现自动化、智能化从根本上提高生产效率和保障职工安全生产,降低职工劳动强度,是目前企业重点工作之一。
4.抽油机皮带工况调查:调查一:经过统计平均每次更换或调整抽油机皮带时间约为35分钟调查二:生产过程中抽油机皮带需要经过多次调整张力。
5.结论:更换或调整抽油机皮带需要人工2人耗时35分钟左右,油田有大量的采油设备仅在皮带方面损失巨大现有的抽油机皮带调节装置,主要存在如下优缺点:(1)、使用顶丝调整,优点是结构简单,使用方便,但是也存在不可替代的缺点,调整范围有局限,没有从根本上降低职工劳动强度。
6.(2)、使用涨紧轮进行调整,优点是效果明显,但是由于增加了一套压紧轮,增加了一套摩擦副,增大了能耗,同时由于涨紧轮安装在皮带外侧,冬季生产时容易使皮带分层加速皮带损坏程度。
7.(3)、使用摆动支架调整皮带张力,优点是调节方便,效果明显。缺点是将电动机抬高后,由于抽油机生产是一个周期性负载剧烈变化的过程因此电动机震动剧烈。
8.(4)、使用滑套式皮带张进装置,优点是调节方便,效果明显。缺点是不能及时判断皮带的张力是否合适,无法及时调整张力。
9.(5)、使用恒张力皮带张进装置,优点是调节方便,效果明显。缺点是不能及时判断皮带的实际磨损程度不能做到提前预警,同时还需要人工巡视监控效率较低,不能实现自动化。
技术实现要素:
10.本发明的目的是克服现有技术的不足,提供一种智能皮带张力恒定保持装置及方法。
11.其技术方案如下:
一种智能皮带张力恒定保持装置,包括设置有驱动丝杆的电动机滑动底座、设置有输出轴的电动机,还包括第一链轮、滚筒、重力桶、第二链轮、第三链轮;所述第一链轮与电动机输出轴传动连接;所述滚筒与第一链轮、第二链轮同轴联动;所述重力桶通过驱动绳缠绕挂接到滚筒上;所述第三链轮与第二链轮传动连接;所述第三链轮与所述驱动丝杆同轴联动;其中,所述第一链轮、第二链轮为单向链轮,重力桶下降时,滚筒转动,第一链轮不动,重力桶上升时,滚筒转动,第二链轮不动。
12.进一步的,还包括力矩放大箱,所述力矩放大箱设置有输入链轮、输出链轮;所述输入链轮与第二链轮传动连接;所述输出链轮与第三链轮传动连接。
13.进一步的,还包括电机控制器、位置传感器,所述位置传感器与电机控制器连接,所述位置传感器包括上限位置传感器、下限位置传感器;所述上限位置传感器设置于所述重力桶上限位置,所述下线位置传感器设置于所述重力桶下限位置。
14.进一步的,还包括计数器,所述计数器与电机控制器连接,用于记录电动机启动次数。
15.更进一步的,还包括智能控制模块、显示模块、通信模块,所述智能控制模块分别与计数器、显示模块、通信模块、位置传感器连接,用于采集和处理各模块数据信号。
16.所述智能控制模块为单片机。
17.所述电动机滑动底座包括滑杆立撑板、滑杆、电机底板、滑套、调节螺母、驱动丝杆;所述滑杆架设于两个立板之间;所述滑套固设于电机底板,滑套滑动套设于滑杆;所述调节螺母设置于电机底板;所述驱动丝杆与调节螺母蜗杆传动配合。
18.所述调节螺母铰接于电机底板。
19.所述滑杆、电机底板均为成对设置,两电机底板之间通过电机底板连接螺栓连接。
20.优选的,一种智能皮带张力恒定保持方法,当重力桶下降至下限位置时,通过位置传感器将下限位置信号传递到智能控制模块,智能控制模块接收下限位置信号后下发启动信号,启动电动机提升重力桶上升;当重力桶上升至上限位置时,通过位置传感器将上限位置信号传递到智能控制模块,智能控制模块接收上限位置信号后下发停机信号,停止电动机。
21.本发明的有益效果是:本发明采用链轮传动,结构简单,工作可靠性高,适应户外井场恶劣的工作环境,通过预设参数实现皮带张紧力实时调整,减少人工出力,提高工作效率,通过传感器和计数器获取皮带实时参数,实现皮带工况的参数化,有利于油田工作智能化发展。
附图说明
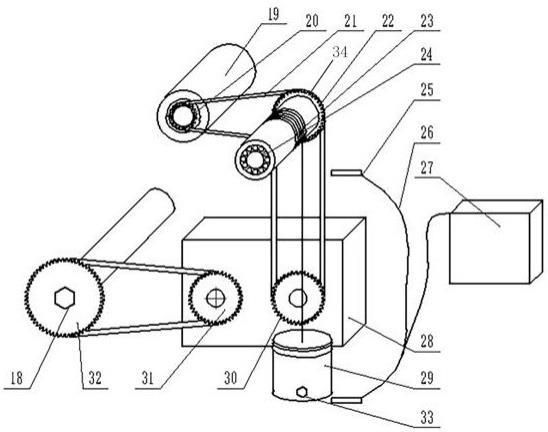
22.图1是本发明结构示意图;图2是设置有驱动丝杆的电动机滑动底座结构示意图;图中:立板1,滑套2,固定底座3,滑杆4,防尘套5,动力箱6,动力箱门7,控制面板8,电机横向槽9,电机底板10,滑套11,电机底板连接螺栓12,滑杆13,调节螺母14,横杆15,调节螺母立板16,滑杆支撑板17,驱动丝杆18,电动机转轴19,驱动链轮20,链条21,第一链轮22,驱动绳23,轴承24,位置传感器25,控制线缆26,智能控制箱27,力矩放大箱28,重力桶29,输入链轮30,输出链轮31,第三链轮32,重力桶调节孔33,第二链轮34。
具体实施方式
23.为使本发明实施例的目的、技术方案更加清楚,下面详细描述本发明的实施例,下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
24.实施例一:一种智能皮带张力恒定保持装置,包括电动机滑动底座和恒张力保持机构,所述电动机滑动底座包括电机底座、滑杆、驱动丝杆,电机底座滑动设置于滑杆,驱动丝杆通过蜗杆传动原理驱动电机底座在滑杆上作往复直线运动。
25.所述恒张力保持机构包括电动机、驱动链轮、第一链轮、滚筒、重力桶、第二链轮、第三链轮。
26.驱动链轮设置于电动机的输出轴,第一链轮通过链条与驱动链轮传动连接,第一链轮、第二链轮与滚筒同轴设置;重力桶通过驱动绳缠绕挂接到滚筒上;第三链轮设置于驱动丝杆端部。
27.所述第三链轮与第二链轮通过链条传动连接;其中,所述第一链轮、第二链轮为单向链轮,重力桶下降时,第一链轮不动,重力桶上升时,第二链轮不动。
28.实施例二:一种智能皮带张力恒定保持装置,还包括力矩放大箱,所述力矩放大箱设置有输入链轮、输出链轮;所述输入链轮与第二链轮传动连接;所述输出链轮与第三链轮传动连接。
29.力矩放大箱内部设置有齿轮组,利用杠杆原理,将第二链轮传递到输入链轮上的扭矩放大传递到输出链轮,从而达到以较小的输入力矩产生较大拉紧力矩的效果。
30.实施例三:一种智能皮带张力恒定保持装置,还包括电机控制器、位置传感器,所述位置传感器与电机控制器连接,所述位置传感器包括上限位置传感器、下限位置传感器;所述上限位置传感器设置于所述重力桶上限位置,所述下线位置传感器设置于所述重力桶下限位置。
31.电机控制器具有电机启停、电机调速等功能,用于控制电动机。
32.位置传感器为接近式位置传感器,用于感应重力桶的位置,同时将开关信号传递到电机控制器。
33.实施例四:一种智能皮带张力恒定保持装置,还包括计数器,所述计数器与电机控制器或位置传感器连接,用于记录电动机启动次数。
34.所述计数器为数显式计数器,记录位置传感器感应到重力桶时产生的开关信号或电动机启停时产生的脉冲信号的次数,该次数即为电动机启停次数。
35.实施例五:一种智能皮带张力恒定保持装置,还包括智能控制模块、显示模块、通信模块,所述智能控制模块分别与计数器、显示模块、通信模块、位置传感器连接,用于采集和处理各模块数据信号。
36.所述智能控制模块为单片机。是采用超大规模集成电路技术把具有数据处理能力的中央处理器cpu、随机存储器ram、只读存储器rom、多种i/o口和中断系统、定时器/计数器等功能(还包括显示驱动电路、脉宽调制电路、模拟多路转换器、a/d转换器等电路)。
37.实施例六:一种电动机滑动底座,包括立板、滑杆、电机底板、滑套、调节螺母、驱动丝杆。
38.立板成对设置,固设于外部设备或固定底座,用于支撑滑杆。固定底座上设置有槽状螺栓孔,立板下方固设有横板,横板上开设螺栓孔,立板与固定底座螺栓连接。
39.所述滑杆为管体,内部插接滑杆支撑板,滑杆支撑板与滑杆内壁过盈配合,滑杆支撑板垂直于地面,以提高滑杆刚性,减少滑杆震颤。滑杆外部套设有防尘套。
40.所述滑杆架设于两个立板之间;所述滑套固设于电机底板,滑套滑动套设于滑杆;所述调节螺母设置于电机底板;所述驱动丝杆与调节螺母蜗杆传动配合。
41.所述调节螺母铰接于电机底板。
42.所述滑杆、电机底板均为成对设置,两电机底板之间通过电机底板连接螺栓连接。
43.实施例七:一种智能皮带张力恒定保持方法,当重力桶下降至下限位置时,通过位置传感器将下限位置信号传递到智能控制模块,智能控制模块接收下限位置信号后下发启动信号,启动电动机提升重力桶上升;当重力桶上升至上限位置时,通过位置传感器将上限位置信号传递到智能控制模块,智能控制模块接收上限位置信号后下发停机信号,停止电动机。
44.智能控制模块内预设有电机启停次数提醒数值,当电机启停次数达到预设数值时,通过通信模块发送提醒信号到工控机或其他外部设备,同时将提醒信息通过显示模块进行显示。
45.本发明的工作原理是:重力桶通过链轮传动、力矩放大箱将转矩传递到驱动丝杆,驱动驱动丝杆转动,驱动丝杆带动电机底座作直线运动,改变位于电机底座上的电动机位置,从而实现皮带的张紧;由于单向链轮的设置,重力桶下降时,不会带动电动机输出轴转动,当重力桶到达下限位置时,通过下限位置传感器感应重力桶位置发出电动机启动信号,电动机启动,卷升重力桶,由于单向链轮的设置,重力桶上升时,不会带动输入链轮转动,重力桶到达上限位置后,通过上限位置传感器停止电动机转动,即完成了一次调整,继续保持持续张紧,通过计数器记录重力桶上升/下降或电动机启停的次数,即可反映出皮带老化程度,技术人员根据经验,设置一个预设值,达到预设值后,通过智能控制模块发送提醒信号,达到智能化的目的。
46.尽管已经示出和描述了本发明的实施例,本领域的普通技术人员可以理解:在不脱离本发明的原理和宗旨的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。