1.本发明属于旋转机械装备的状态监测技术领域,特别涉及一种变工况下的基于图数据的旋转机械设备状态监测方法。
背景技术:
2.旋转机械设备在生产生活中有广泛用途,一旦停机或发生故障会造成很大的经济损失和安全事故,因此,监测其健康状态具有现实与经济意义。随着信息技术的发展,传感器的广泛应用与机器学习和深度学习技术的快速发展,数据驱动模型成为旋转机械设备状态监测的有效方法。考虑到旋转机械设备常用于变工况条件下,研究适用于旋转机械设备在变工况中的状态监测方法已成为国内外研究的热点和难点。
3.常见的基于等时间采样间隔的旋转机械状态监测方法对变工况的处理主要依赖于两种思路:(1)基于特征工程的思路:利用信号处理的方法对原始信号进行消噪,然后对消噪后的信号进行时域、频域、时频域变换处理提取特征。这类方法包括频谱分析、包络谱分析、奇异值分解、谱峭度等故障频率提取方法,以及基于短时傅里叶变换、小波分解、经验模式分解等方法。然而,以上方法对专家经验的依赖较大,不具有泛化性,并且难以量化损坏程度;而且在使用大批量信号进行状态监测时需要耗费大量的人力成本。
4.(2)基于数据驱动模型的方法对样本进行学习,其主要原理是利用其强大的非线性建模能力实现对信号的准确分类来进行状态监测。此类方法包括使用支持向量机、神经网络等方法对所提取的不同指标进行分析来判断故障,但是浅层模型难以在变工况条件下挖掘信号与健康状态间的耦合关系,深层模型又存在计算量大、模型复杂的缺点。
5.阶次谱是由等角度间隔采样的信号得到的,相较于等时间间隔采样得到的信号浓缩了设备运转信息,能够很好的反应旋转机械设备的工作状态。然而,即使如此,其对信号中的信息挖掘仍有限,所开展的状态监测方法效果仍不太理想。
技术实现要素:
6.为了克服上述现有技术的缺点,本发明的目的在于提供一种变工况下的基于图数据的旋转机械设备状态监测方法,对变工况下等时间间隔采样的数据转为等角度采样下的数据,统一表达尺度,以图结构数据作为数据表征,反映了信息内部的拓扑结构,利用图数据相较于其他数据结构有着更强的表征能力,构建图自编码的无监督学习方法,对旋转机械设备进行变工况下的状态监测。
7.为达到上述目的,本发明采用的技术方案为:
8.一种变工况下的基于图数据的旋转机械设备状态监测方法,包括以下步骤:
9.步骤1:获取旋转机械设备不同状态下的振动数据集{di,yi|i∈m},其中,d,y分别代表振动信号及其标签,m代表不同的状态;并根据振动信号d,利用stft等时频分析方法搜索局部峰值fr,再通过频率校正方法获得估计转速s;
10.步骤2:根据估计转速序列s积分得到角度与时间的函数关系;根据等角度采样的
间隔角度,得到对应的时间序列,利用插值法得到等角度采样信号振动数据集并将其分割为多段子信号集其中d,y分别代表等角度重采样后的子信号及其对应的标签,n代表样本的个数;
11.步骤3:对子信号做阶次谱变换,进行能量标准归一化处理,得到阶次谱数据集{fi,yi|i∈m}即其中f,y分别代表能量归一化后的阶次谱子信号及其对应的标签;利用自适应邻居方法构建图数据g=(x,a),其中x是顶点集合,a是边集合,得到其中,g,y分别代表构建的图数据样本及其标签;
12.步骤4:将图数据的邻接矩阵n与特征矩阵s作为图自编码器e的输入,训练网络,得到重构误差阈值λ,作为判别当前状态的指标;测试当前阈值λ是否稳定,当稳定时,部署到工作状态下开始监测任务,反之,则重复步骤4继续进行训练;
13.步骤5:对监测数据执行步骤1至步骤3;使用步骤4中训练的图自编码器e和重构误差阈值λ对监测数据进行判别,若超越阈值λ,则发出报警,监测任务结束,反之,继续对下一段监测数据进行判别。
14.所述步骤2中,将重采样后的数据集分割为多段子信号时,子信号的长度一致。
15.所述步骤3中,使用自适应聚类的方法构建图数据,具体是:以每个子信号fi作为一个样本进行处理,设定超参数邻居个数k;遍历整个样本的所有数据点,为所有数据点找到k个邻居构建边关系,其中,f
ii
为子信号fi的第i个数据点,以f
ii
为基准,遍历子信号fi中的所有数据点,以||f
ii-f
ij
||为距离度量标准选择距离最近的k个数据点,作为f
ii
的k个邻居构建边关系;遍历完成后将所有边关系融合到一起构建出图数据所生成的图数据结构对齐,表征的数据间差异明显。
16.本发明的有益效果为:本发明通过图数据强大的表征能力,探索阶次谱数据的内部数据关系,利用无监督的图自编码器对变工况下的旋转机械设备进行状态监测,弱化了工况条件变换所带来的影响,能够较好的应用于旋转机械设备的变工况运行环境。
附图说明
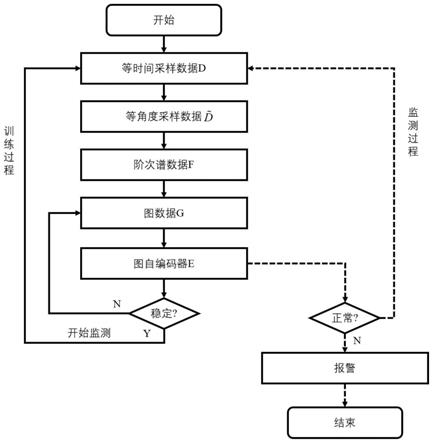
17.图1是基于图数据的旋转机械设备状态监测方法的流程图。
18.图2是图数据的构建方法流程图。
19.图3是图自编码器的示意图。
具体实施方式
20.下面结合附图对本发明进一步详细描述。
21.如图1所示,一种变工况下的基于图数据的旋转机械设备状态监测方法,包括以下步骤:
22.步骤1:参照图2,获取旋转机械设备的不同状态下的振动数据集{di,yi|i∈m};并
根据振动信号d利用stft等时频分析方法搜索局部峰值fr,利用频率校正方法解决频率分辨率低的问题,获得估计转速s;其中,d,y分别代表振动信号及其标签,m代表不同的状态。
23.步骤2:参照图2,根据估计转速序列s积分得到角度与时间的函数关系;根据等角度采样的间隔角度间隔,得到对应的时间序列,利用插值法得到等角度采样信号振动数据集并将其分割为多段子信号集其中d,y分别代表等角度重采样后的子信号及其对应的标签,n代表样本的个数。
24.步骤3:参照图2,对子信号做fft变换得到阶次谱,进行能量标准归一化处理,得到阶次谱数据集{fi,yi|i∈m}即其中f,y分别代表能量归一化后的阶次谱子信号及其对应的标签;利用自适应邻居方法构建图数据g=(x,a),其中x是顶点集合,a是边集合,得到其中,g,y分别代表构建的图数据样本及其标签。
25.所述步骤3中,使用自适应聚类的方法构建图数据,具体是:以每个子信号fi作为一个样本进行处理,设定超参数邻居个数k;遍历整个样本的所有数据点,为所有数据点找到k个邻居构建边关系,以f
ii
为例说明如何找到k个邻居构建边关系,其中,f
ii
为子信号fi的第i个数据点:以f
ii
为基准,遍历子信号fi中的所有数据点,以||f
ii-f
ij
||为距离度量标准选择距离最近的k个数据点,作为f
ii
的k个邻居构建边关系;遍历完成后将所有边关系融合到一起构建出图数据所生成的图数据结构对齐,表征的数据间差异明显。
26.步骤4:参照图3,将图数据g=(x,a)的邻接矩阵n与特征矩阵s作为图自编码器e的输入,训练网络,经过编码器q(z|x,a)与解码器p(a|z)重构出图数据与输入的图数据g=(x,a)相比较,得到重构误差阈值λ,作为判别当前状态的指标;测试当前阈值λ是否稳定,当稳定时,部署到工作状态下开始监测任务,反之,则重复步骤4继续进行训练。
27.步骤5:对监测数据执行步骤1至步骤3;使用步骤4中训练的图自编码器e和重构误差阈值λ对监测数据进行判别,若超越阈值λ,则发出报警,监测任务结束,反之,继续对下一段监测数据进行判别。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
