1.本技术实施例涉及医疗器械技术领域,尤其涉及一种取出装置,用于体内异物取出。
背景技术:
2.单j管、双j管作为内支架管引流越来越广泛应用于肾、输尿管疾病治疗中,取得了良好的效果。但单j管、双j管长时间留置易长皮壳或结石团,导致梗阻拔管困难。因此,有学者认为双j管留置时间不宜过长,国产双j管留置时间不宜超过3个月,进口双j管留置时间不宜超过6个月。
3.直视场景下,由于需要一个人手持膀胱镜或输尿管软镜,经尿道置入后找到双j管在膀胱的弯头,另一人通过工作通道放置异物钳,用抓钳夹住弯头,费时费力,且容易发生操作者与助手配合不当,导致在拉拽的过程中钳或弯钩与双j管之间发生脱管现象,而二次操作会增加对患者的创伤,给患者带来不必要的痛苦,手术效率低。
4.膀胱异物除置入的输尿管支架,还包含体内结石,组织,经尿道途径进入的多种物品等。
5.因此,亟需一种能够更加顺利取出体内异物的产品。
技术实现要素:
6.鉴于上述问题,本技术提供一种取出装置,用于取出体内异物,以克服上述问题或者至少部分地解决上述问题。
7.本技术实施例提供一种取出装置,该取出装置包括:夹持件,用于夹持异物且将其取出;外鞘,其具有:第一通道,用于容置该夹持件;第二通道,用于容置可视镜;第三通道,用于供器械输送或液体流动;握持部,其具有第一控制件,该第一控制件与该夹持件连接,用于控制该夹持件处于展开和闭合状态。
8.可选地,该外鞘还设有柔性部,其设于该外鞘的远端;至少一个牵拉件,其径向穿设于该外鞘内部;该握持部还具有第二控制件,用于控制该牵拉件牵拉该柔性部弯曲,以调整该夹持件的位置。
9.可选地,该第一控制件向近端拉动该夹持件时,该夹持件收入该第一通道,处于闭合状态;该第一控制件向远端推动该夹持件时,该夹持件远离该第一通道,处于展开状态。
10.可选地,该第一通道和该第三通道为同一个通道或两个独立的通道。
11.可选地,该取出装置还包括可视镜固定件,其与该握持部配合连接,以使该可视镜固定件与该握持部可拆卸。
12.可选地,该可视镜固定件具有套接件和可视镜固定部,该套接件套接于该握持部和该可视镜固定部之间。
13.可选地,该第二控制件包括至少一滑块、一滑槽和一滑轨,握持部的外部设有转动件,其中,各滑槽沿该握持部的外表面径向延伸,各滑块分别与各牵拉件连接,且各滑块可
在各滑槽上沿径向滑动,各滑轨沿该转动件的周向方向弯曲延伸;各滑块上分别设有操作件,该操作件可在滑轨上滑动,各滑轨弯曲延伸的弧度使得当转动件沿顺时针或逆时针转动时,各操作件可带动各滑块在各滑槽中滑动,进而带动各牵拉件牵拉柔性部在弯曲,以调整夹持件的位置。
14.可选地,该第二控制件包括转盘,该转盘上设有与该牵拉件数量相对应的孔,该牵拉件穿过孔,固定于该转盘上,当沿顺时针或逆时针转动该转盘时,该转盘带动该牵拉件牵拉柔性部在空间弯曲,以调整该夹持件的空间位置。
15.可选地,该握持部上设置滑槽,在该转盘上设置插销,该牵拉件绕于该插销上,当转动该转盘时,该转盘将转动力通过该插销传递至该牵拉件。
16.可选地,该握持部的外表面还设有防滑件,用于防止操作者在该滑槽中滑动该滑块时手部打滑。
17.可选地,该可视镜固定件具有:卡合件,其上设有卡槽,该卡合件可沿该握持部的周向方向转动;以及可视镜支撑部,其设有腔体,用于可视镜插入和退出第二通道;该握持部设有至少一滑块,各滑块与各牵拉件连接,该滑块用于与该卡槽卡合,且该卡合件可带动该滑块沿该握持部的周向方向滑动,进而带动各牵拉件牵拉该柔性部在弯曲,以调整该夹持件的位置。
18.可选地,该可视镜支撑部上设有凸块,该握持部上设有凹槽,该凸块与该凹槽相配合,以将该可视镜支撑部固定至该握持部。
19.可选地,该握持部还具有连接件,其与该外鞘中的该夹持件和各牵拉件配合连接,以使该外鞘与该握持部可拆卸。
20.可选地,该夹持件选自二片或多片的二抓或多抓的爪形件、钳形件、钩形件、环形圈套器、异形圈套器、网篮、磁吸装置中的一种或其组合。
21.可选地,该连接件的近端和该夹持件、各牵拉件的远端分别设有磁性部,连接件与该夹持件和各牵拉件藉由该磁性部连接。
22.可选地,该夹持件和各牵拉件与该连接件分别设有卡合件,用于将该夹持件和各牵拉件与该连接件分别卡合。
23.可选地,该第二通道的远端设有密封件,且该密封件为透明材质,具有防水雾涂层,用于防止可视镜被污染;该可视镜固定件的外部套设有一次性隔离膜,以避免污染可视镜。
24.可选地,该外鞘连接光源,用于向该第二通道提供照明。
25.相应地,本技术还提供一种套件,该套件包括:上述的取出装置;可视镜,其用于置于该第二通道。
26.由以上技术方案可见,本技术实施例本技术实施例将夹持件、可视镜、器械输送或液体流动集成到同一个装置中,只需要一个操作者便可以完成异物的取出,提高了异物的取出效率,并减少了二次操作的发生几率。
附图说明
27.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
申请实施例中记载的一些实施例,对于本领域普通技术人员来讲,还可以根据这些附图获得其他的附图。
28.图1a是本技术一种取出装置的一实施例的示意图;
29.图1b是图1所示的本技术一种取出装置的一实施例的立体图;
30.图1c至图1e是图1所示的本技术一种取出装置的一实施例的爆炸图;
31.图1f是本技术一种取出装置的另一实施例的示意图;
32.图1g是图1f所示的取出装置的另一实施例的爆炸图;
33.图2a和图2b分别是本技术一种取出装置的外鞘横截面的两个实施例的示意图;
34.图3a至图3c分别是本技术一种取出装置的夹持件由展开至夹持取出异物的不同状态图;
35.图4a和图4b是本技术一种取出装置的又一实施例的爆炸图;
36.图4c和图4d是图4a和图4b所示的取出装置的实施例中握持部与可视镜固定件嵌合的示意图;
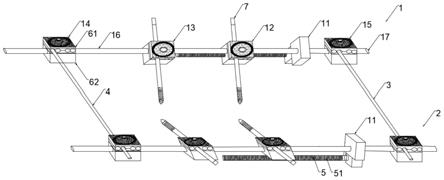
37.图5a是本技术一种取出装置的另又一实施例的示意图;
38.图5b是图5a所示的取出装置的实施例的爆炸图;
39.图6和图7分别为外鞘与握持部可拆卸连接的两实施例的示意图;
40.图8a和图8b分别为图7所示的外鞘与握持部可拆卸连接件的示意图;
41.图9a和图9b分别为外鞘与握持部可拆卸连接的一种取出装置的另一实施例的爆炸图和连接示意图;
42.图10为图9a和图9b所示的实施例中外鞘与握持部可拆卸连接件的示意图;
43.图11a和图11b分别为本技术一种取出装置的再又一实施例的立体图和俯视图;
44.图12a至图12h为本技术夹持件的实施例示意图;
45.图13为本技术一种取出装置的另又一实施例的示意图;
46.图14a和图14b分别为本技术一种取出装置的再一实施例的示意图和剖视图。
具体实施方式
47.为了使本领域的人员更好地理解本技术实施例中的技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术实施例一部分实施例,而不是全部的实施例。基于本技术实施例中的实施例,本领域普通技术人员所获得的所有其他实施例,都应当属于本技术实施例保护的范围。
48.所述的“近端”是指靠近操作者的一端,所述的“远端”是指远离操作者的一端。
49.所述的“异物”是指短暂停留或永久留置于人体或动物体的植入物,或体内的结石、疑似病变的组织。
50.所述的“横向”是指与外鞘延伸方向平行的方向,所述的“纵向”是指与外鞘延伸方向垂直的方向。
51.下面结合本技术实施例附图进一步说明本技术实施例具体实现。
52.参见图1a至图1e,在本技术一具体实现中,提供一种取出装置10,其包括:夹持件101,用于夹持异物且将其取出。
53.请结合参考图1a至图1e、图2a和图2b,取出装置10还包括外鞘102,其具有:第一通
道112,用于容置夹持件101;第二通道122,用于容置可视镜104;第三通道132,用于供器械输送或液体流动;柔性部142,其设于该外鞘102的远端;至少一牵拉件152,其径向穿设于该外鞘102内部。外鞘内部包括除了第一至第三通道之外的任意填充材料处,例如外鞘的壁、轴心处等。牵拉件152在柔性部142的部分可以埋设且固定于外鞘内部,其他部分可以是在通道内可活动的,然上述牵拉件152的设置方式仅用于示例性说明,其设置方式不限于此。第一通道112和第三通道132可以为同一个通道(如图2a所示)或两个独立的通道(如图2b所示),当第一通道112和第三通道132为同一个通道时,即该共同通道同时容纳夹持件和输送的器械或液体流动,由于外鞘102为圆柱形,这种共同通道比两个独立的通道更加节省空间,从而可以减小外鞘102的直径。外鞘102除了通道之外,可由实体材料构成,壁靠近外鞘102的外表面,同样由实体材料构成。牵拉件152可以为一个或更多个,由钢丝或其他材料构成。
54.取出装置10还包括握持部103,其具有:第二控制件113,用于控制各牵拉件152牵拉该柔性部142弯曲,以调整夹持件101位置;第一控制件123,其与夹持件101连接,用于控制夹持件101处于展开和闭合状态,其中,当夹持件101处于闭合状态时,该异物被夹持并取出。
55.本技术实施例将夹持件101、可视镜104、器械输送或液体流动集成到同一个装置中,只需要一个操作者便可以完成异物的取出,提高了异物的取出效率,并减少了二次操作的发生几率。
56.请参考图3a至3c,在该实施例中,在将外鞘102伸入人体的初始状态时,夹持件101可以收于外鞘102中,当第一控制件123向远端推动夹持件101时,夹持件101远离第一通道112,处于展开状态(如图3a所示),第一控制件123夹持住异物20后,向近端拉动夹持件101,夹持件101逐渐收入第一通道112(如图3b和图3c所示),直至处于闭合状态(该闭合状态是指足以夹持住异物20时夹持件101的状态,夹持件101不必然完全闭合,也可以留有少量的缝隙)。
57.在本技术一实施例中,取出装置10还包括可视镜固定件105,用于支撑可视镜104以及便于可视镜104插入和退出第二通道122,可视镜固定件105与握持部103配合连接,以使可视镜固定件105与握持部103可拆卸。配合连接的方式包括,但不限于横向套接纵向套接、嵌合、磁吸或其他适合的结构上相互配合的套件之间的连接方式。可视镜固定件105与握持部103可拆卸可以在每次操作完成后,将握持部103及远端的外鞘102等结构脱离抛弃,而可视镜固定件105以及可视镜104可以多次重复利用。在一可选实施例中,可视镜固定件105的外部可以套设有一次性隔离膜(如图1f所示),避免污染可视镜104的镜体。在另一可选实施例中,第二通道122的远端可设有密封件(图中未示出),用于防止可视镜104被污染,从而进一步保证可视镜104的重复利用性。在又一可选实施例中,可视镜固定件105的外部套设有一次性隔离膜,以避免污染可视镜104。
58.外鞘可连接光源,用于向第二通道提供照明。光源可设置在第二通道的外侧,提供独立照明。独立照明可利用外鞘丙烯酸导光,或内嵌led芯片或光纤,在后端提供光源传光。
59.本技术取出装置10的一实施例的操作方法是:使用前,夹持件101收于外鞘102中,操作者将可视镜固定件105与握持部103连接,在第二通道122中置入可视镜104,操作者通过可视镜104观察,将取出装置10伸入人体目标位置附近,通过第一控制件123向远端推动
夹持件101,使夹持件101远离第一通道112,处于展开状态,通过第二控制件113控制柔性部142在空间的位置,使夹持件101更精确地到达目标位置,如异物(双j管)弯曲的部分。第一控制件123夹持住异物后,向近端拉动夹持件101,同时向近端拖动异物,夹持件101逐渐收入第一通道112,随着操作者向外拖动取出装置10,异物最终被拖出人体。取出可视镜104,将可视镜固定件105与握持部103拆卸,抛弃握持部103,可视镜固定件105和可视镜104可继续重复利用。
60.请参考图1c至图1e,在该实施例中,可视镜固定件105具有套接件115和可视镜固定部125,可视镜固定部125用于固定和支撑可视镜,套接件115套接于握持部103和可视镜固定部125之间。作为示例性说明,套接件115可由多个圆环1151串接形成,如图1e所示,握持部103和可视镜固定部125的内侧设置相应的卡槽,用于与套接件115卡合。根据操作便利性,可视镜固定件105的形状可以如图1c至图1e所示的形状,也可以是如图1f所示的形状,或其他适合的形状。
61.作为可选实施例,第一控制件123可以设于握持部103上,如图1a至图7、图9a至图9b、图11a至图11b所示,第一控制件123包括滑槽1231和滑柄1232,滑柄1232与夹持件101连接,当滑柄1232沿径向向远端推动时,夹持件101的远端远离外鞘102,当滑柄1232沿径向向近端推动时,夹持件101的远端靠近外鞘102。
62.在本技术一实施例中,如图1c和1d所示,第二控制件113包括至少二滑块1131、二滑槽1132和二滑轨1133,握持部103的外部可以设置转动件1031,其中,各滑槽1132可沿径向延伸设于握持部103上,各滑块1131可在各滑槽1132上沿径向滑动,且各滑块1131分别与各牵拉件152连接。各滑轨1133可沿转动件1031的周向方向弯曲延伸,各滑块1131上还分别设有操作件1134,操作件1134可以为铆钉、螺钉等,其与滑块1131连接,操作件1134可在滑轨1133上滑动,各滑轨1133弯曲延伸的弧度可以使得当转动件1031沿顺时针或逆时针转动时,各操作件1134可带动各滑块1131在各滑槽1132中滑动,进而带动各牵拉件152牵拉柔性部142在空间弯曲,以调整夹持件101的空间位置。根据操作者手部握持姿势的不同,可以改变握持部103的外形,如图1f与图1a的区别。
63.在本技术一实施例中,如图1g所示,第二控制件113为转轴结构,且设置于握持部103的一侧。在该实施例中,第二控制件113包括转轴2113、控制柄2114和转盘2115,转盘2115上分别设有二固定件2116,两牵拉件152分别通过顺时针和逆时针,不同方向缠绕于对应的二固定件2116上,旋转控制柄2114,可以带动转盘2115转动,进而带动各牵拉件152牵拉柔性部142在空间弯曲,以调整夹持件101的空间位置。
64.通常,柔性部142在空间弯曲的幅度为0-120
°
,根据实际情况,该幅度可能会超过120
°
。根据各牵拉件152在外鞘102的内部埋设的位置不同,柔性部142弯曲的方向、弯曲程度等也不同。作为可选实施例,握持部103的外表面还可设有防滑件133(如图1a至图1e),用于防止操作者在滑槽中滑动滑块时手部打滑。
65.请参考图4a至图4d,在本实施例中,可视镜固定件105用于支撑可视镜以及便于可视镜插入和退出第二通道122,可视镜固定件105具有卡合件1051和可视镜支撑部1052,卡合件1051上设有卡槽1151,且可沿该握持部103的周向方向顺时针或逆时针方向转动;握持部103设有至少二滑块1431,各滑块1431与各牵拉件152连接,各滑块1431分别与对应的卡槽1151卡合,卡槽1151的数量可以与滑块1431的数量一致。卡槽1151与滑块1431卡合后,顺
时针或逆时针转动滑块1431,可以带动各牵拉件152牵拉柔性部142在空间弯曲,以调整夹持件101的空间位置。通过第一控制件123向远端推动夹持件101,使夹持件101远离第一通道112,处于展开状态,从而套取体内异物。
66.可选地,卡合件1051上还可以设有手柄1251,用于带动卡槽1151转动,进而带动滑块1431沿周向方向顺时针或逆时针方向滑动。在本实施例中,可视镜支撑部1052设有腔体,便于可视镜插入和退出第二通道122,可视镜支撑部1052上还可设有凸块1252,握持部103上设有凹槽1531,凸块1252与凹槽1531相配合,以将可视镜支撑部1052固定至握持部103,从而锁定可视镜镜头与外鞘的夹角。
67.请参考图5a和图5b,在本技术另一实施例中,第二控制件113包括转盘163,转盘163上可设置与牵拉件152数量相对应的孔1631,牵拉件152穿过孔1631,固定于转盘163上。当沿顺时针或逆时针转动转盘163时,转盘163带动牵拉件152牵拉柔性部142在弯曲,以调整夹持件101的位置。可选地,还可在握持部103上设置滑槽1731,在转盘163上设置插销1632,牵拉件152绕于该插销1632上,当顺时针或逆时针转动转盘163时,转盘163将转动力通过插销1632传递至牵拉件152,从而带动牵拉件152牵拉柔性部142在弯曲,以调整夹持件101的位置。
68.请参考图6至图11,作为可选实施例,握持部103与外鞘102配合连接,以使外鞘102与握持部103可拆卸,在该实施例中,可视镜固定件105与握持部103可以是可拆卸连接,或者是固定连接或为一体式结构,从而每次手术完只要抛弃远端的外鞘102部分,保留握持部103、可视镜和可视镜固定件105重复利用,进而可以降低成本。
69.握持部103与外鞘102配合连接的方式有多种,在其中一实施例中,如图6所示,握持部103具有三个连接件183,各连接件183分别设有与夹持件101和牵拉件152对应的腔体,从而可以将外鞘102中的夹持件101和牵拉件152分别插入连接件183对应的腔体中,使用完以后再从腔体中拔出,实现握持部103与外鞘102的可拆卸。
70.在另一实施例中,如图7至图8b所示,握持部103具有三个连接件183,三个连接件183的远端和外鞘102的夹持件101和牵拉件152的近端分别设有磁性部1831a、1831b,磁性部1831可以为结构相互配合且磁性相互吸引的磁铁,成对的磁铁上可以设有凹凸相配的凹槽和凸块,以便于牢固地连接握持部103和外鞘102。
71.在又一实施例中,如图9a、图9b和图10所示,握持部103的远端具有第一卡合件193,第一卡合件193上设有二沟槽1931和第一连接件1932,外鞘102的近端设有第二卡合件192,第二卡合件192上设有二凸起1921和第二连接件1922,第一卡合件193和第二卡合件192上各有相应的凹槽1941a、1941b可供第一连接件1932与第二连接件1922横向相互卡合,凸起1921和沟槽1931可以沿纵向相互卡合,第一连接件1932和第二连接件1922可以沿横向相互卡合,从而既可以牢固地连接外鞘102和握持部103,又可以将两者拆卸。
72.请参考图11a和图11b,第二通道122和第三通道132可以斜向延伸至外鞘102的外部,形成支路,也便于可视镜进出和器械的输入、液体的注入等。
73.本技术取出装置10的另一实施例的操作方法是:使用前,夹持件101收于外鞘102中,操作者将可视镜固定件105与握持部103连接,并将握持部103与外鞘102连接,在第二通道122中置入可视镜,操作者通过可视镜观察,将取出装置10伸入人体目标位置附近,通过第一控制件123向远端推动夹持件101,使夹持件101远离第一通道112,处于展开状态,通过
第二控制件113控制柔性部142在空间的位置,使夹持件101更精确地到达目标位置,即异物弯曲的部分。第一控制件123夹持住异物后,向近端拉动夹持件101,同时向近端拖动异物,夹持件101逐渐收入第一通道112,随着操作者向外拖动取出装置10,异物最终被拖出人体。取出可视镜,将外鞘102从握持部103和可视镜固定件105上拆卸,抛弃外鞘102,可视镜固定件105、可视镜和外鞘102可继续重复利用。
74.请参考图12a至12h,夹持件101包括,但不限于爪、钳、钩、圈套器、磁吸装置或其组合,例如二片或多片的二抓或多抓的爪形件(图12a、12b)、钳形件(图12c)、钩形件(图3a、图12h)、环形圈套器(图12d)、异形圈套器(图12e、12f)、网篮、磁吸装置或其他变形的具有夹持、抓握、套取、磁吸功能的结构中的一种或其组合。夹持件伸出外鞘,可以通过推杆(如图12g)控制开合。如图12h所示,夹持件101还可以在侧边开口,通过拉线形成开合和关闭的状态。以环形圈套器、异形圈套器为例,环形圈套器、异形圈套器收于第一通道112时处于闭合状态,当环形圈套器、异形圈套器逐渐伸出第一通道112时,其由闭合状态逐渐展开,直至展开到最大的幅度。夹持件可以预先设定展开状态时的形状,收缩在外鞘管内,当其伸出外鞘时,利用弹性恢复为预设形状。
75.如图13所示,在该实施例中,取出装置不具有柔性部、牵拉件和第二控制件,外鞘102为刚性直管。
76.如图14a和14b所示,在该实施例中,外鞘102的远端预设成弯管,在外鞘102插入患者体内时,将一直管插入第三通道132,将预弯段屈直,组装可视镜装置后,再将外鞘102插入尿道,到达膀胱后,撤出直管,预弯段自然形成到设定角度。外鞘102上设有第一控制件123,其与夹持件101连接,第一控制件123的示例之一为滑块1001和滑槽1002,通过在滑槽1002中滑动滑块1001,控制夹持件101伸出外鞘102或收入外鞘102。
77.握持部103可以设有二通或三通管道,如图13所示,握持部103设有二通管道,即第二通道122设于外鞘中,第三通道132由外鞘内部延伸至握持部103的外侧,用作注水或器械通道。如图14a和14b所示,握持部103设有三通管道,第三通道132由外鞘内部延伸至握持部103的外侧,用作注水或器械通道,第二通道122由外鞘内部延伸至握持部103的外侧,用作可视镜通道。
78.相应地,本技术一实施例还提供一种套件,该套件包括:上述实施例中的取出装置10;以及可视镜,可视镜用于置于第二通道122,使用完后撤出,可反复利用。该套件的结构和使用方法可参考上述实施例,在此不再赘述。
79.最后应说明的是:以上实施例仅用以说明本技术实施例的技术方案,而非对其限制;尽管参照前述实施例对本技术进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本技术各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。