1.本技术涉及图像处理技术领域,特别是涉及一种车架号图像的获取方法及装置、车架号的等比例还原方法及装置。
背景技术:
2.随着经济的发展,越来越多的家庭开始购买机动车(汽车、摩托车),同时随着物流的飞速发展,货车也越来越多,对于各类机动车的管理也越来越严格。在对机动车进行管理时,非常重要的一点就是对机动车发动机号和车架号的管理。
3.无论是在对机动车上牌、年审还是过户时都需要将机动车的发动机号和车架号拓印下来进行留档,这样当下次年审或迁入、迁出时就可以通过比对留存的发动机号和车架号是否与实际的相同,从而确认机动车的发动机号和车架号是否有篡改。
4.在对机动机的车架号进行拓印时,必须保证其完整性,不仅要字符串完全一致、还要保证各字符的形状、位置、尺寸相同,并且各字符之间的相互位置、尺寸也必须一模一样的反映原号码的样子。这里,物理尺寸在其中具有最有关键性的作用。
5.目前通常用人工去拓印发动机号和车架号,也就是通过纸或其他材料覆盖在发动要号和车架号上,然后拓印下来,这样拓印的号码存在不清晰的问题,而且拓印的效率非常低,这就成为本领域技术人员亟待解决的问题之一。
技术实现要素:
6.鉴于以上所述现有技术的缺点,本技术的目的在于提供一种车架号图像的获取方法及装置、车架号的等比例还原方法及装置,用于解决现有技术中车架号的还原不清晰且效率低下的问题。
7.为实现上述目的及其他相关目的,本技术的第一方面,提供一种车架号图像的获取方法,所述图像中包括车架号和参照物,所述参照物包括多个关键点,所述车架号图像的获取方法包括:
8.通过镜头获取包括车架号和参照物的图像或视频信息;
9.根据所述图像或视频信息判断所述镜头是否满足拍摄条件;
10.当所述镜头满足拍摄条件时,通过所述镜头获取包含车架号和参照物的图像。
11.在本技术第一方面的某些实施方式中,所述根据所述图像或视频信息判断所述镜头是否满足拍摄条件的步骤包括:根据所述图像或视频信息中参照物的关键点信息获取镜头的空间姿态;根据所述参照物的关键点信息获取镜头与车架号所在平面的垂直距离;当镜头的空间姿态和所述垂直距离均满足预设要求时,判定所述镜头满足拍摄条件。
12.在本技术第一方面的某些实施方式中,在根据所述图像或视频信息判断所述镜头是否满足拍摄条件的步骤之前包括:根据所述图像或视频信息获取参照物的关键点信息,并将获取到的关键点信息细化至亚像素级别。
13.本技术的第二方面,提供一种车架号图像的获取装置,所述装置包括:镜头和判断模块,所述镜头用于获取包括车架号和参照物的图像或视频信息;所述判断模块用于根据所述图像或视频信息判断所述镜头是否满足拍摄条件;所述镜头还用于当所述镜头满足拍摄条件时,获取包含车架号和参照物的图像。
14.本技术的第三方面,提供一种车架号的等比例还原方法,所述方法包括:
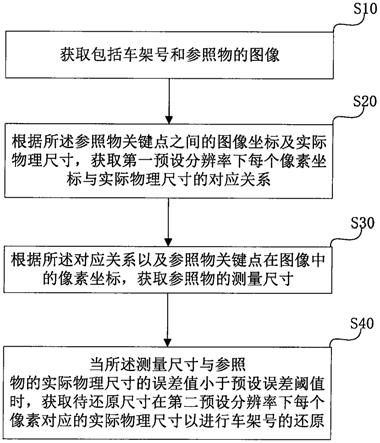
15.获取包括车架号和参照物的图像,所述参照物包括多个关键点;
16.根据所述参照物关键点之间的图像坐标及实际物理尺寸,获取第一预设分辨率下每个像素坐标与实际物理尺寸的对应关系;
17.根据所述对应关系以及参照物关键点在图像中的像素坐标,获取参照物的测量尺寸;
18.当所述测量尺寸与参照物的实际物理尺寸的误差值小于预设误差阈值时,根据图像中车架号位置信息,获取所述车架号的感兴趣区域;
19.获取待还原尺寸以及第二预设分辨率,并根据车架号的感兴趣区域中每个像素对应的实际物理尺寸进行车架号的还原。
20.在本技术第三方面的某些实施方式中,在获取包括车架号和参照物的图像之后还包括:对所述获取的图像进行旋转矫正。
21.在本技术第三方面的某些实施方式中,对所述获取到的图像进行旋转矫正的步骤包括:
22.获取图像中车架号的旋转角度;
23.根据所述旋转角度将所述图像旋转至水平;
24.获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
25.在本技术第三方面的某些实施方式中,在获取图像中车架号的旋转角度之前,还包括:获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
26.在本技术第三方面的某些实施方式中,在获取包括车架号和参照物的图像之后还包括:对所述图像进行参数矫正。
27.在本技术第三方面的某些实施方式中,对所述图像进行参数矫正的步骤包括:
28.对获取所述图像的设备进行参数标定;
29.根据标定后的参数,通过第一函数公式对图像进行参数矫正,所述第一函数公式为:
[0030][0031]
x
′
=x/z
[0032]y′
=y/z
[0033][0034][0035]
where
[0036]
r2=x
′2 y
′2[0037]
u=f
x
×
x
″
c
x
[0038]
v=fy×y″
cy[0039]
其中,x表示相机坐标系中横坐标;y表示相机坐标系中纵坐标;z表示相机坐标系中z 方向深度坐标;x表示世界坐标系中横坐标;y表示世界坐标系中纵坐标;z表示世界坐标系中z方向深度坐标;r表示世界坐标系到相机坐标系转换的旋转矩阵;t表示世界坐标系到相机坐标系转换的平移矩阵;x’表示归一化相机坐标系中横坐标;y’表示归一化相机坐标系中纵坐标;x”表示归一化相机坐标系中校正后横坐标;y”表示归一化相机坐标系中校正后纵坐标;k1、k2、k3径向畸变系数;p1、p2切向畸变系数;s1、s2镜像比例系数;s2、s3切向比例系数;r表示极坐标半径;u表示图像坐标系横坐标;v表示图像坐标系纵坐标;f
x
表示相机横向焦距;fy表示相机纵向焦距;c
x
表示相机中心点横向坐标;cy表示相机中心点纵向坐标。
[0040]
在本技术第三方面的某些实施方式中,在通过第一函数公式对图像进行参数矫正之前,还包括:根据参照物关键点的位置信息获取包括车架号在内的感兴趣区域图像;在获取到所述感兴趣区域图像后,通过第一函数公式对所述感兴趣区域图像进行参数矫正。
[0041]
在本技术第三方面的某些实施方式中,所述获取包括车架号和参照物的图像的步骤包括:
[0042]
根据预设规则将参照物设置于车架号的一侧;
[0043]
当与车架号所在平面的夹角不超过预设夹角阈值时,获取包括车架号和参照物的图像。
[0044]
在本技术第三方面的某些实施方式中,所述车架号的等比例还原方法还包括:当与车架号所在平面的夹角不超过预设夹角阈值,且所述车架号与参照物处于感兴趣区域内时,获取包括车架号和参照物的图像。
[0045]
在本技术第三方面的某些实施方式中,所述获取包括车架号和参照物的图像的步骤包括:通过镜头获取包括车架号和参照物的图像或视频信息;根据所述图像或视频信息判断所述镜头是否满足拍摄条件;当所述镜头满足拍摄条件时,通过所述镜头获取包含车架号和参照物的图像。
[0046]
本技术的第四方面,提供一种车架号的等比例还原装置,所述装置包括:
[0047]
图像获取模块,用于获取包括车架号和参照物的图像,所述参照物包括多个关键点;
[0048]
对应关系获取模块,用于根据所述参照物关键点之间的图像坐标及实际物理尺寸,获取第一预设分辨率下每个像素坐标与实际物理尺寸的对应关系;
[0049]
测量尺寸获取模块,用于根据所述对应关系以及参照物关键点在图像中的像素坐标,获取参照物的测量尺寸;
[0050]
感兴趣区域获取模块,用于当所述测量尺寸与参照物的实际物理尺寸的误差值小于预设误差阈值时,根据图像中车架号位置信息,获取所述车架号的感兴趣区域;
[0051]
还原模块,用于获取待还原尺寸以及第二预设分辨率,并根据车架号的感兴趣区域中每个像素对应的实际物理尺寸进行车架号的还原。
[0052]
在本技术第四方面的某些实施方式中,所述车架号的等比例还原装置还包括:旋转矫正模块,用于对所述获取的图像进行旋转矫正。
[0053]
在本技术第四方面的某些实施方式中,所述旋转矫正模块包括:
[0054]
角度获取单元,用于获取图像中车架号的旋转角度;
[0055]
图像旋转单元,用于根据所述旋转角度将所述图像旋转至水平;
[0056]
关键点获取单元,用于获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
[0057]
在本技术第四方面的某些实施方式中,所述关键点获取单元还用于在在获取图像中车架号的旋转角度之前,获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
[0058]
在本技术第四方面的某些实施方式中,所述车架号的等比例还原装置还包括:参数矫正模块,用于对所述图像进行参数矫正。
[0059]
在本技术第四方面的某些实施方式中,所述图像获取模块包括:镜头和判断模块,所述镜头用于获取包括车架号和参照物的图像或视频信息;所述判断模块用于根据所述图像或视频信息判断所述镜头是否满足拍摄条件;所述镜头还用于当所述镜头满足拍摄条件时,获取包含车架号和参照物的图像。
[0060]
如上所述,本技术的车架号图像的获取方法及装置、车架号的等比例还原方法及装置,具有以下有益效果:
[0061]
本技术的还原方法及装置在同一图像中获取车架号和参照物,根据参照物关键点取得像素坐标与实际物理尺寸的对应关系,并且当测量尺寸与参考物的实际物理尺寸的误差小于预设阈值时,获取车架号的感兴趣区域,然后对车架号进行还原操作。通过这样的方式不仅可以实现车架号的自动还原,而且还可以提高还原的准确性。
[0062]
进一步地,本技术在还原前,对图像进行矫正,通过矫正,提高了图像的精准度和清晰度,从而提高了还原后车架号的准确性。
附图说明
[0063]
图1显示为本技术车架号图像的获取方法的实施例一的流程示意图。
[0064]
图2显示为本技术车架号图像的获取方法的实施例一中步骤s20的流程示意图。
[0065]
图3显示为本技术车架号图像的获取装置的实施例一的结构示意图。
[0066]
图4显示为本技术车架号的等比例还原方法的实施例一的流程示意图。
[0067]
图5显示为本技术车架号的等比例还原方法的实施例二的流程示意图。
[0068]
图6显示为本技术车架号的等比例还原方法的实施例三的流程示意图。
[0069]
图7显示为本技术车架号的等比例还原方法的实施例三中步骤s100的流程示意图。
[0070]
图8显示为本技术车架号的等比例还原装置的实施例一的结构示意图。
[0071]
图9显示为本技术车架号的等比例还原装置的实施例二的结构示意图。
[0072]
图10显示为本技术车架号的等比例还原装置的实施例三的结构示意图。
[0073]
图11显示为本技术车架号的等比例还原装置的实施例三中旋转矫正模块的结构示意图。
具体实施方式
[0074]
以下由特定的具体实施例说明本技术的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本技术的其他优点及功效。
[0075]
在下述描述中,参考附图,附图描述了本技术的若干实施例。应当理解,还可使用其他实施例,并且可以在不背离本公开的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变.下面的详细描述不应该被认为是限制性的,并且本技术的实施例的范围仅由公布的专利的权利要求书所限定.这里使用的术语仅是为了描述特定实施例,而并非旨在限制本技术。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、“下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
[0076]
虽然在一些实例中术语第一、第二等在本文中用来描述各种元件,但是这些元件不应当被这些术语限制。这些术语仅用来将一个元件与另一个元件进行区分。例如,第一预设分辨率可以被称作第二预设分辨率,并且类似地,第二预设分辨率可以被称作第一预设分辨率,而不脱离各种所描述的实施例的范围。第一预设分辨率和第二预设分辨率均是在描述一个分辨率,但是除非上下文以其他方式明确指出,否则它们不是同一个预设分辨率。
[0077]
再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示.应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加.此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合.因此,“a、b或c”或者“a、b 和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”.仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
[0078]
请参阅图1,图1显示为本技术车架号图像的获取方法的实施例一的流程示意图,在本实施例中,所述图像中包括车架号和参照物,所述参照物包括多个关键点,所述车架号图像的获取方法包括:
[0079]
步骤s10,通过镜头获取包括车架号和参照物的图像或视频信息;
[0080]
在本实施例中,所述参照物可以为棋盘格形式,每个关键点之间具有相同的间距。在本实施例可以根据预设规则将参照物设置于车架号的下方;当与车架号所在平面的夹角不超过预设夹角阈值时,获取包括车架号和参照物的图像。
[0081]
具体地,为后续还原的精准度,需要将参照物按照预设规则设置于车架号的下方,所述预设规则包括但不限于:将参照物放置于车架号同平面,在实际应用中,可以将误差控制在 2mm之内;另外,参照物中最靠近车架号的关键点的上边缘与车架号下边缘的距离不超过 3cm。在拍摄车架号和参照物的图像时,需要将拍摄镜头所在的平面与车架号所在平面的夹角控制在一定范围内,例如可以将预设夹角阈值设置为4度,只有当拍摄镜头所在的平面与车架号所在的平面的夹角小于或等于4度时,才可获取图像;如果夹角超过4度,将影响后续还原的精度。
[0082]
当然,在其他实施例中,还可以将参照物设置于车架号的上方、车架号的左方或车架号的右方,本技术对此不做限制。无论参照物与车架号的相对位置如何,均可以按照本实施例中的预设规则或者预设夹角阈值进行设置,以便提高获取的图像的精度,从而提高后
续车架号的还原精度。
[0083]
步骤s20,根据所述图像或视频信息判断所述镜头是否满足拍摄条件;
[0084]
步骤s30,当所述镜头满足拍摄条件时,通过所述镜头获取包含车架号和参照物的图像。
[0085]
具体地,如图2所示,所述步骤s20:根据所述图像或视频信息判断所述镜头是否满足拍摄条件的步骤包括:
[0086]
步骤s21,根据所述图像或视频信息中参照物的关键点信息获取镜头的空间姿态;在本实施例中,通过机器学习(machine learning)方法对图像或视频信息中参照物的关键点信息进行分析,从而获取镜头的空间姿态。在实际应用中,可以从事先获取的不同姿态下的训练样本中学习二维观测与三维姿态之间的对应关系,并将学习得到的决策规则或回归函数应用于样本,从而以所得结果作为对样本的姿态估计。当然,在其他实施例中,还可以通过其他方法获取镜头的空间姿态。例如,通过模型的方法,也就是利用物体的几何关系或者物体的特征点来进行空间姿态的获取。该方法主要利用某种几何模型或结构来表示物体的结构和形状,并通过提取某些物体特征,在模型和图像之间建立起对应关系,然后通过几何或者其它方法实现物体空间姿态的获取。这里所使用的模型既可能是简单的几何形体,如平面、圆柱,也可能是某种几何结构,也可能是通过激光扫描或其它方法获得的三维模型,本技术对此不做限制。
[0087]
步骤s22,根据所述参照物的关键点信息获取镜头与车架号所在平面的垂直距离;
[0088]
步骤s23,当镜头的空间姿态和所述垂直距离均满足预设要求时,判定所述镜头满足拍摄条件。
[0089]
在具体应用中,所述垂直高度的范围包括15cm~25cm:当然,也可以根据实际情况对所述垂直高度范围做出调整,本技术对此不做限制。本实施例中,当镜头的空间姿态、镜头与车架号所在平面的垂直距离均符合预设要求时,进行拍摄,通过这样的方式获取的图像质量高,其包含的车架号信息的全面性和完整性高,有利地提高了后续车架号的还原操作的精确性。
[0090]
另外需要说明的是,在其他实施例中,判定所述镜头满足拍摄条件不仅包括镜头的空间姿态和所述垂直距离均满足预设要求,还包括:参照物和车架号均处于感兴趣区域(region ofinterest,roi)。也就是说,只有当镜头的空间姿态和所述垂直距离均满足预设要求,并且参照物和车架号均处于感兴趣区域时才判定所述镜头满足拍摄条件。通过这样的方式可以进一步提高获取到的图像的精确度,从而进一步提高后续还原操作的精度。
[0091]
在本实施例中,在步骤s20:根据所述图像或视频信息判断所述镜头是否满足拍摄条件的步骤之前包括:根据所述图像或视频信息获取参照物的关键点信息,并将获取到的关键点信息细化至亚像素级别。
[0092]
通过将关键点信息细化的操作,进一步提高了车架号信息的精度,同时进一步提高了后续车架号的还原操作的精度。
[0093]
图3示出了本技术车架号图像的获取装置的实施例一的结构示意图。如图3所示,所述装置包括:镜头100和判断模块200。所述镜头100用于获取包括车架号和参照物的图像或视频信息;所述判断模块200用于根据所述图像或视频信息判断所述镜头是否满足拍摄条件;所述镜头100还用于当所述镜头满足拍摄条件时,获取包含车架号和参照物的图像。
[0094]
本实施例中,所述镜头可采用光学定焦镜头,当然,在其他实施例中,也可以根据实际需要,更换为更符合需求的镜头,本技术对此不做限制。所述判断模块20的具体工作原理可参考前述关于车架号图像的获取方法的详细描述,在此不再赘述。
[0095]
图4示了本技术车架号的等比例还原方法的实施例一的流程示意图。如图4所示,所述车架号的等比例还原方法包括步骤s40~步骤s80。具体地:
[0096]
步骤s40,获取包括车架号和参照物的图像,所述参照物包括多个关键点;
[0097]
本实施例中,首先通过镜头获取包括车架号和参照物的图像或视频信息;然后根据所述图像或视频信息判断所述镜头是否满足拍摄条件;当所述镜头满足拍摄条件时,再通过所述镜头获取包含车架号和参照物的图像。所述步骤s40的具体实现方法可参考图1中关于车架号图像的获取方法的详细描述,在此不再赘述。
[0098]
具体应用中,可以根据预设规则将参照物设置于车架号的一侧,当与车架号所在平面的夹角不超过预设夹角阈值时,获取包括车架号和参照物的图像。
[0099]
在本实施例中,可以将参照物设置于车架号的下方,所述预设规则包括但不限于:将参照物放置于车架号同平面,在实际应用中,可以将误差控制在2mm之内;另外,参照物中最靠近车架号的关键点的上边缘与车架号下边缘的距离不超过3cm。在拍摄车架号和参照物的图像时,需要将拍摄镜头所在的平面与车架号所在平面的夹角控制在一定范围内,例如可以将预设夹角阈值设置为4度,只有当拍摄镜头所在的平面与车架号所在的平面的夹角小于或等于4度时,才可获取图像;如果夹角超过4度,将影响后续还原的精度。
[0100]
当然,在其他实施例中,还可以将参照物设置于车架号的上方、车架号的左方或车架号的右方,本技术对此不做限制。无论参照物与车架号的相对位置如何,均可以按照本实施例中的预设规则或者预设夹角阈值进行设置,以便提高获取的图像的精度,从而提高后续车架号的还原精度。
[0101]
步骤s50,根据所述参照物关键点之间的图像坐标及实际物理尺寸,获取第一预设分辨率下每个像素坐标与实际物理尺寸的对应关系;
[0102]
在本实施例中,第一预设分辨率与获取图像的设备相关,例如可以采用手持pda(personal digital assistant,个人数字助理)来获取分辨率为1920*2080的图像,那么第一预设分辨率即1920*2080。当然,在实际应用中,可以根据实际需要设置不同的分辨率,本技术对此不做限制。每个像素坐标与实际物理尺寸的对应关系(mm/pixel)可通过参照物关键点之间的实际物理尺寸/像素总数来获得。
[0103]
步骤s60,根据所述对应关系以及参照物关键点在图像中的像素坐标,获取参照物的测量尺寸;在本实施例中,在获得所述对应关系(mm/pixel)后,再根据参照物关键点的像素坐标(pixel),即可获取参照物关键点之间的测量尺寸(mm)。
[0104]
步骤s70,当所述测量尺寸与参照物的实际物理尺寸的误差值小于预设误差阈值时,根据图像中车架号位置信息,获取所述车架号的感兴趣区域;
[0105]
在本实施例中,只有当测量尺寸与参照物的实际物理尺寸的误差小于预设误差阈值时才会进行还原,若测量尺寸与实际物理尺寸之间的误差大于预设误差阈值,不进行还原。因为当误差过大时,还原后无法满足车架号的精准度。在实际应用中,可以根据经验值设置所述预设误差阈值,比如将所述预设误差阈值设置为1mm。
[0106]
在本步骤中,当测量尺寸与实际物理尺寸之间的误差小于预设误差阈值时,根据
参照物关键点的位置信息获取包括车架号在内的感兴趣区域图像;在获取到所述感兴趣区域图像后,再进行后续处理。也就是说,在进行还原操作之前,还可以将图像进行裁剪处理,从而可以将图像中与后续还原不相关的部分去除掉,只保留感兴趣区域图像,对感兴趣区域中的图像进行相关还原处理。在本实施例中,可以根据实际需求设置感兴趣区域,本技术对此不做限制。
[0107]
具体地,可通过机器学习中的深度神经网络技术来定位车架号的位置,从而设定车架号所在的roi区域;根据实际需求获取车架号所在的roi区域图像。在其他实施例中,还可以采用其他方法获取感兴趣区域图像,本技术对此不做限制。
[0108]
步骤s80,获取待还原尺寸以及第二预设分辨率,并根据车架号的感兴趣区域中每个像素对应的实际物理尺寸进行车架号的还原。
[0109]
在实际应用中,通常将车架号还原至a4纸上进行存档,因此可以将待还原尺寸设置为 a4纸的尺寸,而且在实际应用中,通常采用300dpi或者600dpi的分辨率进行打印,因此所述第二预设分辨率可以根据需求设置为300dpi或者600dpi。根据待还原尺寸以及第二预设分辨率,再结合前述对应关系(mm/pixel)即可得出各个像素在待还原尺寸上的实际物理尺寸,然后通过得到的实际物理尺寸进行图像打印即可完成还原。
[0110]
通过本实施例的还原方法可以有效的降低人工成本,同时采用图像处理的算法可有效提高还原后的清晰度和精准度。
[0111]
图5示了本技术车架号的等比例还原方法的实施例二的流程示意图。与实施例一相比,在本实施例中,在步骤s40:获取包括车架号和参照物的图像之后还包括步骤s90:对所述图像进行参数矫正。
[0112]
具体地,所述步骤s90:对所述图像进行参数矫正的步骤包括:对获取所述图像的设备进行参数标定;根据标定后的参数,通过第一函数公式对图像进行参数矫正。所述第一函数公式为:
[0113][0114]
x
′
=x/z
[0115]y′
=y/z
[0116][0117][0118]
where
[0119]
r2=x
′2 y
′2[0120]
u=f
x
×
x
″
c
x
[0121]
v=fy×y″
cy[0122]
其中,x表示相机坐标系中横坐标;y表示相机坐标系中纵坐标;z表示相机坐标系中z 方向深度坐标;x表示世界坐标系中横坐标;y表示世界坐标系中纵坐标;z表示世界坐标系中z方向深度坐标;r表示世界坐标系到相机坐标系转换的旋转矩阵;t表示世界坐标系
到相机坐标系转换的平移矩阵;x’表示归一化相机坐标系中横坐标;y’表示归一化相机坐标系中纵坐标;x”表示归一化相机坐标系中校正后横坐标;y”表示归一化相机坐标系中校正后纵坐标;k1、k2、k3径向畸变系数;p1、p2切向畸变系数;s1、s2镜像比例系数;s2、s3切向比例系数;r表示极坐标半径;u表示图像坐标系横坐标;v表示图像坐标系纵坐标;f
x
表示相机横向焦距;fy表示相机纵向焦距;c
x
表示相机中心点横向坐标;cy表示相机中心点纵向坐标。
[0123]
在实际应用中,对设备进行参数标定时可采用离线标定的方式进行,标定的过程可参考现有标定的相关技术,本技术对此不再赘述。通过参数矫正后,图像中每个像素的坐标更加精准,在后续获得与实际物理尺寸的对应关系时,也会更加精确,最终的还原效果会更好,精准度更高。
[0124]
另外在本实施例中,所述步骤s40:获取包括车架号和参照物的图像的方法与实施例一中不同的是,根据预设规则将参照物设置于车架号的一侧,当与车架号所在平面的夹角不超过预设夹角阈值、且所述车架号与参照物处于感兴趣区域内时,获取包括车架号和参照物的图像。
[0125]
具体地,与实施例一相似的,所述预设规则包括但不限于:将参照物放置于车架号同平面,在实际应用中,可以将误差控制在2mm之内;另外,参照物中最靠近车架号的关键点的上边缘与车架号下边缘的距离不超过3cm。在获取包括车架号和参照物的图像时,不仅与车架号所在平面的夹角不超过预设夹角阈值,而且所述车架号与参照物处于感兴趣区域内。
[0126]
与实施例一相似的,拍摄车架号和参照物的图像时,需要将拍摄镜头所在的平面与车架号所在平面的夹角控制在一定范围内,例如可以将预设夹角阈值设置为4度,同时判断车架号与参照物是否处于感兴趣区域,若车架号与参照物未处于感兴趣区域,则不获取图像以提高后续还原的精准度。与本实施例中前面关于感兴趣区域的介绍相似,此处的感兴趣区域同样可以根据需求进行设置,本技术对此不做限制。
[0127]
本实施例中,在获取图像之后,进行还原操作之前先对图像进行参数矫正,通过矫正后的图像像素坐标更加精确,从而进一步提高了后续还原的精准度。
[0128]
图6示了本技术车架号的等比例还原方法的实施例三的流程示意图。与实施例二相比,在本实施例中,在步骤s40:获取包括车架号和参照物的图像之后还包括步骤s100:对所述获取的图像进行旋转矫正。在本实施例中,所述步骤s100在步骤s40之后,步骤s90之前,但是在其他实施例中,所述步骤s100可以与步骤s90并行或者在步骤s90之后,本技术对此不做限制。
[0129]
具体地,如图7所示,所述步骤s100:对所述获取到的图像进行旋转矫正的步骤包括:
[0130]
步骤s101,获取图像中车架号的旋转角度;
[0131]
步骤s102,根据所述旋转角度将所述图像旋转至水平;
[0132]
步骤s103,获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
[0133]
在其他实施例中,在步骤s101获取图像中车架号的旋转角度之前,还包括:获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
[0134]
与实施例二相比,本实施例的步骤s90,对所述图像进行参数矫正的步骤包括:对获取所述图像的设备进行参数标定;根据参照物关键点的位置信息获取包括车架号在内的
感兴趣区域图像;在获取到所述感兴趣区域图像后,通过第一函数公式以及根据标定后的参数对所述感兴趣区域图像进行参数矫正。也就是说,在进行具体的参数矫正前,还可以将图像进行裁剪处理,这样可以将图像中与后续还原不相关的部分去除掉,只保留感兴趣区域图像,对感兴趣区域中的图像进行参数矫正,可以提高矫正效率和矫正的精度。在本实施例中,可以根据实际需求设置感兴趣区域,本技术对此不做限制。所述第一函数公式以及参数标定的过程及工作原理与实施例二中的相似,在此不再赘述。
[0135]
在本实施例中,对图像不仅进行参数矫正而且还进行旋转矫正,通过这样的方式进一步提高了图像中像素坐标的精准度,从而进一步提高了后续还原操作的精准度。
[0136]
图8示出了本技术车架号的等比例还原装置的实施例一的结构示意图,如图所示,所述装置包括:图像获取模块10、对应关系获取模块20、测量尺寸获取模块30、感兴趣区域获取模块40和还原模块50。
[0137]
所述图像获取模块10用于获取包括车架号和参照物的图像,所述参照物包括多个关键点。具体地,所述图像获取模块10包括:镜头和判断模块,所述镜头用于获取包括车架号和参照物的图像或视频信息;所述判断模块用于根据所述图像或视频信息判断所述镜头是否满足拍摄条件;所述镜头还用于当所述镜头满足拍摄条件时,获取包含车架号和参照物的图像。
[0138]
在本实施例中,所述参照物可以为棋盘格形式,每个关键点之间具有相同的间距。具体地,所述图像获取模块10在获取包括车架号和参照物的图像时,可以先根据预设规则将参照物设置于车架号的下方,当然也可以根据需求将参照物设置于车架号的其他方位(如上方、左方或右方)。所述预设规则包括但不限于:将参照物放置于车架号同平面,在实际应用中,可以将误差控制在2mm之内;另外,参照物中最靠近车架号的关键点的上边缘与车架号下边缘的距离不超过3cm。然后当与车架号所在平面的夹角不超过预设夹角阈值时,获取包括车架号和参照物的图像。具体地,在拍摄车架号和参照物的图像时,需要将拍摄镜头所在的平面与车架号所在平面的夹角控制在一定范围内,例如可以将预设夹角阈值设置为4度,只有当拍摄镜头所在的平面与车架号所在的平面的夹角小于或等于4度时,才可获取图像;如果夹角超过4度,将影响后续还原的精度。所述图像获取模块10的工作原理及方法可参考前述图1关于车架号图像的获取方法的详细描述,在此不再赘述。
[0139]
所述对应关系获取模块20,用于根据所述参照物关键点之间的图像坐标及实际物理尺寸,获取第一预设分辨率下每个像素坐标与实际物理尺寸的对应关系。
[0140]
所述测量尺寸获取模块30用于根据所述对应关系以及参照物关键点在图像中的像素坐标,获取参照物的测量尺寸;
[0141]
所述感兴趣区域获取模块40用于当所述测量尺寸与参照物的实际物理尺寸的误差值小于预设误差阈值时,根据图像中车架号位置信息,获取所述车架号的感兴趣区域。在本实施例中,在进行还原操作之前,首先将图像进行裁剪处理,从而可以将图像中与后续还原不相关的部分去除掉,只保留感兴趣区域图像,对感兴趣区域中的图像进行相关还原处理。在本实施例中,可以根据实际需求设置感兴趣区域,本技术对此不做限制。具体地,可通过机器学习中的深度神经网络技术来定位车架号的位置,从而设定车架号所在的roi区域;根据实际需求获取车架号所在的roi区域图像。在其他实施例中,还可以采用其他方法获取感兴趣区域图像,本技术对此不做限制。
[0142]
所述还原模块50用于获取待还原尺寸以及第二预设分辨率,并根据车架号的感兴趣区域中每个像素对应的实际物理尺寸进行车架号的还原。
[0143]
所述对应关系获取模块20、测量尺寸获取模块30以及还原模块50的具体工作原理和工作过程可参考前述图4所示的步骤s50、s60以及s80的详细描述,在此不再赘述。
[0144]
图9示出了本技术车架号的等比例还原装置的实施例二的流程示意图,如图所示,与实施例一相比,在本实施例中,所述装置还包括:参数矫正模块60。所述参数矫正模块60用于对所述图像进行参数矫正。
[0145]
具体地,所述参数矫正模块60的工作原理可参考前述步骤s90的详细说明,例如采用离线标定的方式对设备进行参数标定,标定的过程可参考现有标定的相关技术,然后根据标定后的参数,通过第一函数对图像进行参数矫正。通过参数矫正后,图像中每个像素的坐标更加精准,在后续获得与实际物理尺寸的对应关系时,也会更加精确,最终的还原效果会更好,精准度更高。
[0146]
在本实施例中,所述图像获取模块10还可以根据参照物关键点的位置信息获取包括车架号在内的感兴趣区域图像;所述参数矫正模块60还用于在获取到所述感兴趣区域图像后,对所述感兴趣区域图像进行参数矫正。具体地,在进行具体的参数矫正前,还可以将图像进行裁剪处理,这样可以将图像中与后续还原不相关的部分去除掉,只保留感兴趣区域图像,对感兴趣区域中的图像进行参数矫正,可以提高矫正效率和矫正的精度。在本实施例中,可以根据实际需求设置感兴趣区域,本技术对此不做限制。
[0147]
与实施例一相比,本实施例中的图像获取模块10:在根据预设规则将参照物设置于车架号的下方后,在与车架号所在平面的夹角不超过预设夹角阈值,且所述车架号与参照物处于感兴趣区域内时,获取包括车架号和参照物的图像。具体地,根据预设规则将参照物设置于车架号的下方的实现过程可参考前述关于步骤s11的描述,所述预设规则包括但不限于:将参照物放置于车架号同平面,在实际应用中,可以将误差控制在2mm之内;另外,参照物中最靠近车架号的关键点的上边缘与车架号下边缘的距离不超过3cm。
[0148]
但是在获取包括车架号和参照物的图像时,不仅与车架号所在平面的夹角不超过预设夹角阈值,而且所述车架号与参照物处于感兴趣区域内。与实施例一相似的,拍摄车架号和参照物的图像时,需要将拍摄镜头所在的平面与车架号所在平面的夹角控制在一定范围内,例如可以将预设夹角阈值设置为4度,同时判断车架号与参照物是否处于感兴趣区域,若车架号与参照物未处于感兴趣区域,则不获取图像以提高后续还原的精准度。与本实施例中前面关于感兴趣区域的介绍相似,此处的感兴趣区域同样可以根据需求进行设置,本技术对此不做限制。
[0149]
本实施例中,在获取图像之后,进行还原操作之前先对图像进行参数矫正,通过矫正后的图像像素坐标更加精确,从而进一步提高了后续还原的精准度。
[0150]
图10示出了本技术车架号的等比例还原装置实施例三的结构示意图。如图所示,所述装置还包括:旋转矫正模块70,用于对所述获取的图像进行旋转矫正。
[0151]
具体地,如图11所示,所述旋转矫正模块包括:
[0152]
角度获取单元71,用于获取图像中车架号的旋转角度;
[0153]
图像旋转单元72,用于根据所述旋转角度将所述图像旋转至水平;
[0154]
关键点获取单元73,用于获取图像中参照物的关键点,并将所述关键点精细化至
亚像素级别。
[0155]
在其他实施例中,所述关键点获取单元73还可以在在获取图像中车架号的旋转角度之前,获取图像中参照物的关键点,并将所述关键点精细化至亚像素级别。
[0156]
需要说明的是,在本实施例中,所述旋转矫正模块70与图像获取模块10连接,接收图像获取模块10输出的图像,对图像进行旋转矫正后,再输出至参数矫正模块60,由所述参数矫正模块60对旋转矫正后的图像进行参数矫正。当然,在其他实施例中,旋转矫正模块70和参数矫正模块60可以并行处理,也可以先由参数矫正模块60对图像获取模块10输出的图像进行参数矫正,然后再输出至旋转矫正模块70进行旋转矫正,本技术对此不做限制。
[0157]
在本实施例中,对图像进行参数矫正和旋转矫正,进一步提高了图像中像素坐标的精准度,从而进一步提高了后续还原操作的精准度。
[0158]
综上所述,本技术的车架号图像的获取方法及装置、车架号的等比例还原方法及装置,通过位于同一图像中的参照物获取其像素坐标与实际物理尺寸的对应关系,再通过对应关系进行车架号的还原。通过这样的方式还原后,提高了还原的车架号的精准度,同时也提高了还原的效率。另外,还可以对获取到的图像进行矫正,通过矫正进一步提高了还原的车架号的精准度。
[0159]
上述实施例仅例示性说明本技术的原理及其功效,而非用于限制本技术。任何熟悉此技术的人士皆可在不违背本技术的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本技术所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本技术的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。