1.本发明涉及一种捡拾分级机,特别涉及一种基于机器视觉的自走式多机械臂马铃薯捡拾机,属于农业收获机械领域。
背景技术:
2.我国是马铃薯种植大国,但不少马铃薯产区位于地形复杂的丘陵山区,地块小且不规整,大型联合收获机不能适用,因此多采用马铃薯挖掘机先将马铃薯挖出来放在地面,后面再通过人工捡拾的方式进行捡拾,但这样存在诸多缺陷。
3.一方面是人工捡拾速度慢、效率低,容易造成漏检,同时人力成本占全部支出的很大一部分,直接影响经济效益,另一方面尘土污染大,捡拾环境差,而且人工捡拾多采用半蹲的方式,极易劳累,长时间弯腰捡拾损害身体健康。
技术实现要素:
4.本发明提供一种基于机器视觉的自走式多机械臂马铃薯捡拾机,可以有效地解决人工捡拾马铃薯速度慢、效率低,作业环境差对人体有害和人力成本昂贵的问题。
5.为了解决上述技术问题,本发明提供一种基于机器视觉的自走式多机械臂马铃薯捡拾机,包括机械臂、工业相机、铝型材机架、驱动电机、传送带、减速器、转向电机、支撑架、轮毂电机车轮、传动轴、c型安装板和集薯箱,所述工业相机布置在铝型材机架最前方,所述机械臂安装在铝型材机架两侧,所述集薯箱布置在铝型材机架最后方,所述c型安装板布置在铝型材机架底部四周,所述传送带通过轴承座与铝型材机架连接,所述驱动电机控制机械臂,所述转向电机和减速器安装在c型安装板上,所述c型安装板通过传动轴连接支撑架,所述支撑架与轮毂电机车轮连接,所述减速器带动传动轴,进而控制轮毂电机车轮转向。
6.作为本发明的一种优选技术方案,所述工业相机安装位置可以按照需要进行调整。
7.作为本发明的一种优选技术方案,所述铝型材机架通过底部四个轮毂电机车轮驱动。
8.作为本发明的一种优选技术方案,所述机械臂成对安装在铝型材机架两侧。
9.作为本发明的一种优选技术方案,所述轮毂电机车轮自身负责控制行进,上方转向电机控制转向。
10.作为本发明的一种优选技术方案,所述传送带分为大传送带和小传送带两种,机械臂将不同大小的马铃薯放到对应传送带上,从而实现马铃薯分级。
11.本发明所达到的有益效果是:该种基于机器视觉的自走式多机械臂马铃薯捡拾分级机,功能强大,可以一次性完成马铃薯捡拾、分级和入箱,并且能够实现稳定自走,捡拾马铃薯同时可以进行初步分级,有效减少后续分级工作量,两个机械臂协同工作,大大提高捡拾效率,可以代替人工捡拾,有效解决了工作环境差、劳动强度大和动作重复枯燥的问题,保证捡拾后马铃薯的质量。
附图说明
12.附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
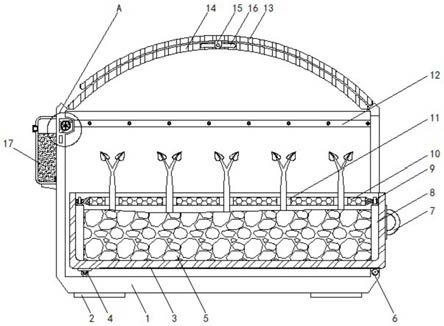
13.图1是本发明的结构示意图。
14.图2是本发明的转向部分结构示意图。
15.图中:1、机械臂;2、工业相机;3、铝型材机架;4、驱动电机;5、传送带;6、减速器;7、转向电机;8、支撑架;9、轮毂电机车轮;10、传动轴;11、c型安装板;12、集薯箱。
具体实施方式
16.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
17.如图1~2所示,本发明提供一种基于机器视觉的自走式多机械臂马铃薯捡拾机,包括机械臂1、工业相机2、铝型材机架3、驱动电机4、传送带5、减速器6、转向电机7、支撑架8、轮毂电机车轮9、传动轴10、c型安装板11和集薯箱12,工业相机2布置在铝型材机架3最前方,机械臂1安装在铝型材机架3两侧,集薯箱12布置在铝型材机架3最后方,c型安装板11布置在铝型材机架3底部四周,传送带5通过轴承座与铝型材机架3连接,驱动电机4控制机械臂1,转向电机7和减速器6安装在c型安装板11上,c型安装板11通过传动轴10连接支撑架8,支撑架8与轮毂电机车轮9连接,减速器6带动传动轴10,进而控制轮毂电机车轮9转向。
18.进一步的,工业相机2安装位置可以按照需要进行调整,有利识别的更大范围内的马铃薯。
19.进一步的,机械臂1成对安装在铝型材机架3两侧,有利协同工作提高捡拾效率。
20.进一步的,铝型材机架3通过底部四个轮毂电机车轮9驱动,有利于捡拾分级机稳定自走。
21.进一步的,轮毂电机车轮9自身负责控制行进,上方转向电机7控制转向,有利于保证正确行进方向。
22.进一步的,传送带5分为大传送带和小传送带两种,机械臂1将不同大小的马铃薯放到对应传送带5上,有利于同时完成马铃薯分级。
23.本发明的工作原理:工作时,捡拾机稳定自走,转向电机7通过减速器6和传动轴10控制轮毂电机车轮9的方向,通过工业相机2识别到马铃薯位置并传递给驱动电机4,驱动电机4控制机械臂1完成规划路径并捡拾马铃薯,捡拾完成后放到对应大小的传送带5上,运动至铝型材机架3末端的集薯箱12中,完成捡拾分级。
24.本发明为一种基于机器视觉的自走式多机械臂马铃薯捡拾机,功能强大,可以一次性完成马铃薯捡拾、分级和入箱,并且能够实现稳定自走,捡拾马铃薯同时可以进行初步分级,有效减少后续分级工作量,两个机械臂协同工作,大大提高捡拾效率,可以代替人工捡拾,有效解决了工作环境差、劳动强度大和动作重复枯燥的问题,保证捡拾后马铃薯的质量。
25.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。
凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种基于机器视觉的自走式多机械臂马铃薯捡拾机,包括机械臂(1)、工业相机(2)、铝型材机架(3)、驱动电机(4)、传送带(5)、减速器(6)、转向电机(7)、支撑架(8)、轮毂电机车轮(9)、传动轴(10)、c型安装板(11)和集薯箱(12),其特征在于,所述工业相机(2)布置在铝型材机架(3)最前方,所述机械臂(1)安装在铝型材机架(3)两侧,所述集薯箱(12)布置在铝型材机架(3)最后方,所述c型安装板(11)布置在铝型材机架(3)底部四周,所述传送带(5)通过轴承座与铝型材机架(3)连接,所述驱动电机(4)控制机械臂(1),所述转向电机(7)和减速器(6)安装在c型安装板(11)上,所述c型安装板(11)通过传动轴(10)连接支撑架(8),所述支撑架(8)与轮毂电机车轮(9)连接,所述减速器(6)带动传动轴(10),进而控制轮毂电机车轮(9)转向。2.根据权利要求1所述的一种基于机器视觉的自走式多机械臂马铃薯捡拾机,其特征在于,所述工业相机(2)安装位置可以按照需要进行调整。3.根据权利要求1所述的一种基于机器视觉的自走式多机械臂马铃薯捡拾机,其特征在于,所述机械臂(1)成对安装在铝型材机架(3)两侧。4.根据权利要求1所述的一种基于机器视觉的自走式多机械臂马铃薯捡拾机,其特征在于,所述铝型材机架(3)通过底部四个轮毂电机车轮(9)驱动。5.根据权利要求1所述的一种基于机器视觉的自走式多机械臂马铃薯捡拾机,其特征在于,所述轮毂电机车轮(9)自身负责控制行进,上方转向电机(7)控制转向。6.根据权利要求1所述的一种基于机器视觉的自走式多机械臂马铃薯捡拾机,其特征在于,所述传送带(5)分为大传送带和小传送带两种,机械臂(1)将不同大小的马铃薯放到对应传送带(5)上,从而实现马铃薯分级。
技术总结
本发明公开一种基于机器视觉的自走式多机械臂马铃薯捡拾机,包括机械臂、工业相机、铝型材机架、驱动电机、传送带、减速器、转向电机、支撑架、轮毂电机车轮、传动轴、C型安装板和集薯箱,工业相机布置在铝型材机架最前方,机械臂安装在铝型材机架两侧,集薯箱布置在铝型材机架最后方,C型安装板布置在铝型材机架底部四周,传送带通过轴承座与铝型材机架连接,驱动电机控制机械臂,转向电机和减速器安装在C型安装板连接,C型安装板通过传动轴连接支撑架,支撑架与轮毂电机车轮连接,减速器带动传动轴,进而控制轮毂电机车轮转向,该种马铃薯捡拾分级机基于机器视觉识别马铃薯位置并传递给驱动电机,驱动电机控制机械臂工作捡拾马铃薯,并放到对应传送带上,功能强大,可以一次性完成马铃薯捡拾、分级和入箱,并且能够实现稳定自走,捡拾马铃薯同时可以进行初步分级,有效减少后续分级工作量,两个机械臂协同工作,大大提高捡拾效率,可以代替人工捡拾,有效解决了工作环境差、劳动强度大和动作重复枯燥的问题,保证捡拾后马铃薯的质量。保证捡拾后马铃薯的质量。保证捡拾后马铃薯的质量。
技术研发人员:陈军 周建国 高泽宁 王妙海 陈清宇 刘兴
受保护的技术使用者:西北农林科技大学
技术研发日:2020.08.11
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。