1.本实用新型涉及插件机用的弯脚机构领域技术,尤其是指一种插针弯脚机构。
背景技术:
2.插件机是将各种电子元件插装到电路板指定位置的加工设备。插件机工作时首先需将各种电子元件送料至插件机夹料装置,然后由夹料装置夹取电子元件准确地插入电路板预设的引脚插孔内来完成插件加工,最后通过弯脚机构完成插件弯脚工序。现有的弯脚机构存在部分的不足:只能进行x、y轴向的弯脚,对于电路板上元件的布置而言,需要预留固定的弯脚空间,设计时受局限,无法对其与pcb板之间的间距进行调整,适应范围小,以及,结构布局较不合理。
3.因此,需要研究一种新的技术方案来解决上述问题。
技术实现要素:
4.有鉴于此,本实用新型针对现有技术存在之缺失,其主要目的是提供一种插针弯脚机构,其实现了多方向弯脚设计,能满足不同pin脚的弯折需求,能调整与pcb之间的间距,适应范围广,结构布置紧凑合理。
5.为实现上述目的,本实用新型采用如下之技术方案:
6.一种插针弯脚机构,包括机械手、驱动机械手旋转的旋转装置及驱动机械手沿xyz向移动的三轴移动装置;所述三轴移动装置包括x轴移动装置、y轴移动装置及z轴移动装置,所述x轴移动装置连接于y轴移动装置上,所述z轴移动装置连接于x轴移动装置上,所述旋转装置连接于z轴移动装置上,所述机械手连接于旋转装置上;
7.所述x轴移动装置包括沿左右方向延伸的底座及设置于底座上的x轴移动带、驱动x轴移动带的x轴移动驱动单元、x轴移动滑轨、x轴移动滑块、x轴连接块,所述x轴移动滑轨沿左右方向延伸,所述x轴移动滑块适配于x轴移动滑轨上,所述x轴连接块分别连接于x轴移动滑块、x轴移动带;
8.所述y轴移动装置包括y轴移动带、驱动y轴移动带的y轴移动驱动单元、y轴移动滑轨、y轴移动滑块、y轴连接块,所述y轴移动滑轨沿前后方向延伸,所述y轴移动滑块适配于y轴移动滑轨上,所述y轴连接块分别连接于y轴移动滑块、y轴移动带;所述底座分别连接于y轴移动滑块、y轴连接块;
9.所述z轴移动装置包括支撑座及设置于支撑座上的z轴、驱动z轴的z轴移动驱动单元、z轴移动滑轨、z轴移动滑块、z轴连接块,所述z轴移动滑轨沿上下方向延伸,所述z轴移动滑块适配于z轴移动滑轨上,所述z轴连接块分别连接于z轴移动滑块、z轴,所述支撑座连接于x轴连接块上,所述旋转装置连接于z轴连接块上。
10.作为一种优选方案,所述旋转装置包括安装座及设置于安装座上的第一旋转机构、第二旋转机构,所述安装座连接于z轴连接块,所述第一旋转机构包括第一旋转轴及驱动第一旋转轴的第一旋转驱动单元,所述第二旋转机构包括第二旋转轴及驱动第二旋转轴
的第二旋转驱动单元,所述机械手连接于第二旋转轴,所述机械手连接有旋转块,所述第一旋转轴的输出端连接有第一旋转轮,所述旋转块连接有第二旋转轮,所述第一旋转轮与第二旋转轮通过一转动带连接;所述机械手在夹持状态时,其夹持中心相对第二旋转轮的转动中心偏心设置。
11.作为一种优选方案,所述第二旋转轴上设置有沿第二旋转轴的周向延伸的角度测试板,所述安装座上设置有传感器,所述传感器用于检测角度测试板的旋转角度。
12.作为一种优选方案,所述插针弯脚机构还包括有底箱,所述三轴移动装置设置于底箱上,所述旋转装置、机械手位于底箱的容纳腔上方。
13.作为一种优选方案,所述机械手包括两对称设置的夹持臂,两夹持臂可相向或背向运动,以实现对元件pin脚的夹持或松开。
14.作为一种优选方案,所述夹持臂设置有夹持槽,所述夹持槽沿上下方向延伸,所述夹持槽形成于夹持臂的夹持侧。
15.作为一种优选方案,所述夹持臂的上端具有向上延伸的延伸部,所述夹持槽形成于延伸部上。
16.作为一种优选方案,所述x轴移动驱动单元、y轴移动驱动单元、z轴移动驱动单元、第一旋转驱动单元、第二旋转驱动单元均为电机。
17.作为一种优选方案,所述三轴移动装置上设置有用于检测与pcb板之间的间距传感器,所述间距传感器设置于x轴连接块的上端。
18.本实用新型与现有技术相比具有明显的优点和有益效果,具体而言,由上述技术方案可知,其主要是通过旋转装置及驱动机械手沿xyz向移动的三轴移动装置的结合设计,并使三轴移动装置包括x轴移动装置、y轴移动装置及z轴移动装置,x轴移动装置连接于y轴移动装置上,z轴移动装置连接于x轴移动装置上,旋转装置连接于z轴移动装置上,将机械手连接于旋转装置上,使其实现了多方向弯脚设计,能满足不同pin脚的弯折需求,且结构布置紧凑合理,占用空间小,传动精密,运行精确度高;其次是,通过间距传感器的设置,可实时监控并调整机械手与pcb板之间的间距,从而达到适应范围广的目的;再者是,通过底箱的设置,可使其能更好地对加工过程中所产生的废料杂物等进行收集;以及,通过夹持臂和夹持槽的结合设计,可使其能更稳固地对元件pin脚进行夹持,尤其是,通过延伸部的设置,可使其能更好地伸入并进行夹持。
19.为更清楚地阐述本实用新型的结构特征、技术手段及其所达到的具体目的和功能,下面结合附图与具体实施例来对本实用新型作进一步详细说明。
附图说明
20.图1是本实用新型之实施例的整体结构立体示意图;
21.图2是图1所示结构的另一角度示意图;
22.图3是本实用新型之实施例的局部结构立体示意图;
23.图4是图3所示结构的另一角度示意图;
24.图5是本实用新型之实施例的气头组件的立体示意图;
25.图6是图5所示结构的另一角度示意图;
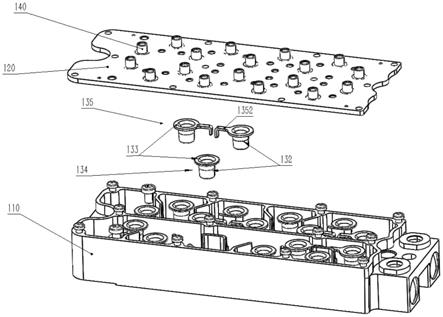
26.图7是本实用新型之实施例的气头组件去除防护罩后的结构示意图;
27.图8是图7所示结构的另一角度示意图;
28.图9是本实用新型之实施例的气头组件的部分结构示意图;
29.图10是图9所示结构的另一角度示意图;
30.图11是本实用新型之实施例的插针弯脚机构的立体示意图;
31.图12是图11所示结构的另一角度示意图;
32.图13是本实用新型之实施例的插针弯脚机构的分解图;
33.图14是本实用新型之实施例的插针弯脚机构的另一分解图。
34.附图标识说明:
35.10、机台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、机罩
36.12、保护门
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20、送料机构
37.21、送料轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22、送料驱动单元
38.30、气头组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31、防护罩
39.32、储气罐
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
33、气头
40.34、气管
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
35、上层电磁阀
41.36、下层电磁阀
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
37、衔接管
42.38、转动机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
381、转动轮
43.382、转动驱动单元
ꢀꢀꢀꢀꢀꢀ
39、升降机构
44.391、升降滑块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
392、升降导轨
45.393、升降输送带
ꢀꢀꢀꢀꢀꢀꢀꢀ
394、升降驱动单元
46.395、升降块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
40、插针弯脚机构
47.41、机械手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411、夹持臂
48.412、夹持槽
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
413、延伸部
49.42、x轴移动装置
ꢀꢀꢀꢀꢀꢀꢀ
421、底座
50.422、x轴移动驱动单元
ꢀꢀ
423、x轴移动滑轨
51.424、x轴移动滑块
ꢀꢀꢀꢀꢀꢀ
425、x轴连接块
52.43、y轴移动装置
ꢀꢀꢀꢀꢀꢀꢀ
431、y轴移动驱动单元
53.432、y轴移动滑轨
ꢀꢀꢀꢀꢀꢀ
433、y轴移动滑块
54.434、y轴连接块
ꢀꢀꢀꢀꢀꢀꢀꢀ
44、z轴移动装置
55.441、支撑座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
442、z轴
56.443、z轴移动驱动单元
ꢀꢀ
444、z轴移动滑轨
57.445、z轴移动滑块
ꢀꢀꢀꢀꢀꢀ
446、z轴连接块
58.45、旋转装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
451、安装座
59.452、第一旋转机构
ꢀꢀꢀꢀꢀꢀ
4521、第一旋转轴
60.4522、第一旋转驱动单元 453、第二旋转机构
61.4531、第二旋转轴
ꢀꢀꢀꢀꢀꢀꢀ
4532、第二旋转驱动单元
62.46、旋转块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
47、第一旋转轮
63.48、第二旋转轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
49、角度测试板
64.401、底箱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
50、伺服驱动器
65.60、y轴驱动机构
ꢀꢀꢀꢀꢀꢀꢀꢀ
61、y轴
66.62、y轴驱动单元
ꢀꢀꢀꢀꢀꢀꢀꢀ
70、x轴驱动机构
67.71、基座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
72、x轴
68.73、x轴驱动单元
ꢀꢀꢀꢀꢀꢀꢀꢀ
101、上层回流腔
69.102、下层回流腔
ꢀꢀꢀꢀꢀꢀꢀꢀ
103、回流轨道
70.104、传感器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
105、基架
71.106、插头。
具体实施方式
72.请参照图1至图14所示,其显示出了本实用新型之实施例的具体结构。
73.一种插件机,包括机台10及安装于机台10上的送料机构20、气头组件30、插针弯脚机构40、回流线、伺服驱动器50,该伺服驱动器50驱动连接送料机构20、气头组件30、插针弯脚机构40,该伺服驱动器50设置于机台10的顶部,该气头组件30可沿xy向水平移动式设置于送料机构20的上方,该插针弯脚机构40位于送料机构20的一侧,该回流线包括上层回流腔101和下层回流腔102,该上层回流腔101具有贯穿机台10左右两侧的回流轨道103,该插针弯脚机构40位于上层回流腔101下方,该下层回流腔102设置于机台10的底部,该下层回流腔102自机台10的底部向上凹设。于本实施例中,所述机台10的上方设置有机罩11,所述上层回流腔101形成于机罩11上,所述回流轨道103贯穿机罩11的左右两侧,所述送料机构20、插针弯脚机构40、伺服驱动器50均位于机罩11内,所述机罩11的前侧设置有可翻折式保护门12。
74.于本实施例中,所述机台10上设置有y轴驱动机构60及x轴驱动机构70,所述x轴驱动机构70连接于y轴驱动机构60上,所述y轴驱动机构60包括y轴及驱动y轴的y轴驱动单元62,所述x轴驱动机构70连接于y轴,所述x轴驱动机构70包括基座71及安装于基座71上的x轴72、驱动x轴72的x轴驱动单元73,所述基座71连接于y轴,所述气头组件30连接于x轴72。
75.于本实施例中,所述送料机构20有两组,两组送料机构20分别左右间距布置,每个送料机构20均包括送料轨道21及驱动料带移动的送料驱动单元22。
76.于本实施例中,所述气头组件30包括真空泵、储气罐32、电磁阀、气头33,所述真空泵分别连接于储气罐32、电磁阀,所述储气罐32连接于电磁阀,所述气头33通过气管34连接于电磁阀,所述气头33可拆卸式连接有插头106。优选地,所述电磁阀包括上层电磁阀35、下层电磁阀36,所述储气罐32位于上层电磁阀35、下层电磁阀36之间,所述上层电磁阀35通过衔接管37连接于储气罐32,所述气管34连接于下层电磁阀36。
77.于本实施例中,所述气头33连接有转动机构38,所述转动机构38包括转动轮381及驱动转动轮381转动的转动驱动单元382,所述气头33连接于转动轮381,所述气头33位于转动机构38的下方连接有升降机构39,所述升降机构39包括升降滑块391、沿上下方向延伸的升降导轨392、升降输送带393及升降驱动单元394,所述升降驱动单元394驱动连接升降输送带393,所述升降输送带393连接有升降块395,所述升降滑块391连接于升降块395,所述升降滑块391适配于升降导轨392上,所述气头33连接于升降块395。以及,所述气头33可以设置有四个或六个,于本实施例中,所述气头33设置有六个,六个气头33沿左右方向依次并排设置,相应地,所述上层电磁阀35、下层电磁阀36、气管34、转动机构38、升降机构39、插头106均设置有六个。此处,所述气头组件30还包括基架105及连接于基架105的防护罩31,所
述储气罐32、电磁阀、气头33均设置于基架105上,所述基架105连接于x轴72,所述储气罐32、电磁阀、气管34、转动机构38等均位于防护罩31内,所述气头33、插头106均露于防护罩31的下方。
78.于本实施例中,所述插针弯脚机构40包括机械手41、驱动机械手41旋转的旋转装置45及驱动机械手41沿xyz向移动的三轴移动装置;所述三轴移动装置包括x轴移动装置42、y轴移动装置43及z轴移动装置44,所述x轴移动装置42连接于y轴移动装置43上,所述z轴移动装置44连接于x轴移动装置42上,所述旋转装置45连接于z轴移动装置44上,所述机械手41连接于旋转装置45上。
79.所述x轴移动装置42包括沿左右方向延伸的底座421及设置于底座421上的x轴移动带(图中未示出)、驱动x轴移动带的x轴移动驱动单元422、x轴移动滑轨423、x轴移动滑块424、x轴连接块425,所述x轴移动滑轨423沿左右方向延伸,所述x轴移动滑块424适配于x轴移动滑轨423上,所述x轴连接块425分别连接于x轴移动滑块424、x轴移动带;所述y轴移动装置43包括y轴移动带(图中未示出)、驱动y轴移动带的y轴移动驱动单元431、y轴移动滑轨432、y轴移动滑块433、y轴连接块434,所述y轴移动滑轨432沿前后方向延伸,所述y轴移动滑块433适配于y轴移动滑轨432上,所述y轴连接块434分别连接于y轴移动滑块433、y轴移动带;所述底座421分别连接于y轴移动滑块433、y轴连接块434;所述z轴移动装置44包括支撑座441及设置于支撑座441上的z轴442、驱动z轴442的z轴移动驱动单元443、z轴移动滑轨444、z轴移动滑块445、z轴连接块446,所述z轴移动滑轨444沿上下方向延伸,所述z轴移动滑块445适配于z轴移动滑轨444上,所述z轴连接块446分别连接于z轴移动滑块445、z轴442,所述支撑座441连接于x轴连接块425上,所述旋转装置45连接于z轴连接块446上。此处,所述x轴移动带、y轴移动带均连接有带轮。
80.所述旋转装置45包括安装座451及设置于安装座451上的第一旋转机构452、第二旋转机构453,所述安装座451连接于z轴连接块446,所述第一旋转机构452包括第一旋转轴4521及驱动第一旋转轴4521的第一旋转驱动单元4522,所述第二旋转机构453包括第二旋转轴4531及驱动第二旋转轴4531的第二旋转驱动单元4532,所述机械手41连接于第二旋转轴4531,所述机械手41连接有旋转块46,所述第一旋转轴4521的输出端连接有第一旋转轮47,所述旋转块46连接有第二旋转轮48,所述第一旋转轮47与第二旋转轮48通过一转动带(图中未示出)连接;所述机械手41在夹持状态时,其夹持中心相对第二旋转轮48的转动中心偏心设置。
81.所述插针弯脚机构40还包括有底箱401,所述三轴移动装置设置于底箱401上,所述旋转装置45、机械手41位于底箱401的容纳腔上方,如此,通过底箱401的设置,可使其能更好地对加工过程中所产生的废料杂物等进行收集。
82.以及,于本实施中,所述第二旋转轴4531上设置有沿第二旋转轴4531的周向延伸的角度测试板49,所述安装座451上设置有传感器104,所述传感器104用于检测角度测试板49的旋转角度,以实时获得第二旋转轴4531的旋转角度从而得以明确机械手41的旋转角度。
83.还有,于本实施例中,所述机械手41包括两对称设置的夹持臂411,两夹持臂411可相向或背向运动,以实现对元件pin脚的夹持或松开;且所述夹持臂411设置有夹持槽412,所述夹持槽412沿上下方向延伸,所述夹持槽412形成于夹持臂411的夹持侧,所述夹持臂
411的上端具有向上延伸的延伸部413,所述夹持槽412形成于延伸部413上。如此,通过夹持臂411和夹持槽412的结合设计,可使其能更稳固地对元件pin脚进行夹持,尤其是,通过延伸部413的设置,可使其能更好地伸入并进行夹持。
84.另外,于本实施例中,所述x轴移动驱动单元422、y轴移动驱动单元431、z轴移动驱动单元443、第一旋转驱动单元4522、第二旋转驱动单元4532均为电机。所述三轴移动装置上设置有用于检测与pcb板之间的间距传感器(图中未示出),所述间距传感器优选设置于x轴连接块425的上端。如此,通过间距传感器的设置,可实时监控并调整机械手41与pcb板之间的间距,从而达到适应范围广的目的。
85.综上所述,本实用新型的设计重点在于,其主要是通过旋转装置及驱动机械手沿xyz向移动的三轴移动装置的结合设计,并使三轴移动装置包括x轴移动装置、y轴移动装置及z轴移动装置,x轴移动装置连接于y轴移动装置上,z轴移动装置连接于x轴移动装置上,旋转装置连接于z轴移动装置上,将机械手连接于旋转装置上,使其实现了多方向弯脚设计,能满足不同pin脚的弯折需求,且结构布置紧凑合理,占用空间小,传动精密,运行精确度高;其次是,通过间距传感器的设置,可实时监控并调整机械手与pcb板之间的间距,从而达到适应范围广的目的;再者是,通过底箱的设置,可使其能更好地对加工过程中所产生的废料杂物等进行收集;以及,通过夹持臂和夹持槽的结合设计,可使其能更稳固地对元件pin脚进行夹持,尤其是,通过延伸部的设置,可使其能更好地伸入并进行夹持。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。