技术特征:
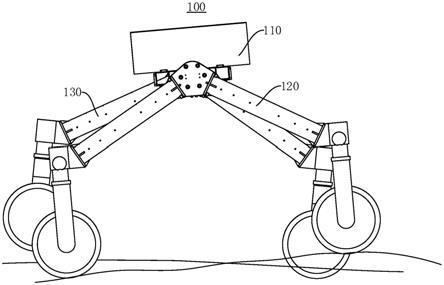
1.一种农田机器人,其特征在于,包括主梁(110)、第一行走轮机构(120)和第二行走轮机构(130);所述第一行走轮机构(120)和所述第二行走轮机构(130)相对设置于所述主梁(110)的两端,所述第一行走轮机构(120)包括第一旋转组件(121)和第一行走轮组件(140),所述第一行走轮组件(140)安装于所述第一旋转组件(121)上,所述第一旋转组件(121)与所述主梁(110)转动连接;所述第一旋转组件(121)能够在行走过程中相对于所述主梁(110)转动,以使所述第一行走轮组件(140)相对于所述主梁(110)的轴心线转动。2.根据权利要求1所述的农田机器人,其特征在于,所述第一旋转组件(121)包括轴承座(123)、轴承(124)和两个第一悬臂(127),所述第一行走轮组件(140)包括两个第一行走轮(122),所述轴承座(123)套设于所述轴承(124)外,所述轴承(124)套设于所述主梁(110)外,两个所述第一悬臂(127)呈预设角度设置,且均与所述轴承座(123)固定连接,每个所述第一行走轮(122)安装于一个所述第一悬臂(127)远离所述轴承座(123)的一端。3.根据权利要求2所述的农田机器人,其特征在于,所述轴承座(123)设置有限位块(128),所述主梁(110)设置有抵持块(111),所述限位块(128)能够在所述轴承座(123)相对于所述主梁(110)转动至极限位置时与所述抵持块(111)抵持。4.根据权利要求2所述的农田机器人,其特征在于,所述主梁(110)包括梁体(112)、支撑轴(113)和限位法兰(114),所述梁体(112)设置有第一固定法兰(115),所述支撑轴(113)固定连接于所述限位法兰(114)的中部,所述限位法兰(114)与所述第一固定法兰(115)固定连接,所述轴承(124)套设于所述支撑轴(113)外,所述限位法兰(114)用于对所述轴承座(123)进行限位。5.根据权利要求1所述的农田机器人,其特征在于,所述第二行走轮机构(130)包括固定组件(131)和第二行走轮组件(150),所述第二行走轮组件(150)安装于所述固定组件(131)上,所述固定组件(131)与所述主梁(110)固定连接。6.根据权利要求5所述的农田机器人,其特征在于,所述固定组件(131)包括固定座(133)、定位轴(134)和两个第二悬臂(135),所述第二行走轮组件(150)包括两个第二行走轮(132),所述定位轴(134)安装于所述固定座(133),且与所述主梁(110)配合,两个所述第二悬臂(135)呈预设角度设置,且均与所述固定座(133)固定连接,每个所述第二行走轮(132)安装于一个所述第二悬臂(135)远离所述固定座(133)的一端。7.根据权利要求6所述的农田机器人,其特征在于,所述主梁(110)包括设置有第二固定法兰(116)的梁体(112),所述定位轴(134)伸入所述第二固定法兰(116),并与所述第二固定法兰(116)配合,所述第二固定法兰(116)与所述固定座(133)固定连接。8.根据权利要求1所述的农田机器人,其特征在于,所述第二行走轮机构(130)包括第二旋转组件(136)和第二行走轮组件(150),所述第二行走轮组件(150)安装于所述第二旋转组件(136)上,所述第二旋转组件(136)与所述主梁(110)转动连接。9.根据权利要求8所述的农田机器人,其特征在于,所述农田机器人还包括云台,所述云台安装于所述主梁(110)上,所述云台用于使所述主梁(110)保持水平状态。10.根据权利要求1所述的农田机器人,其特征在于,所述农田机器人还包括执行机构,所述执行机构搭载于所述主梁(110)上。
技术总结
本实用新型公开了一种农田机器人,涉及机器人技术领域。该农田机器人包括主梁、第一行走轮机构和第二行走轮机构。第一行走轮机构和第二行走轮机构相对设置于主梁的两端,第一行走轮机构包括第一旋转组件和第一行走轮组件,第一行走轮组件安装于第一旋转组件上,第一旋转组件与主梁转动连接,第一旋转组件能够在行走过程中相对于主梁转动,以使第一行走轮组件相对于主梁的轴心线转动。本实用新型提供的农田机器人能够保证多个轮子同时着地,避免发生走歪或者牵引力不足的情况,提高稳定性和可控性。性。性。
技术研发人员:詹婷婷 苏吉贤 萧延强
受保护的技术使用者:广州极飞科技股份有限公司
技术研发日:2021.09.29
技术公布日:2022/2/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。