1.本发明涉及机械传动领域,柔性机械臂领域,仿生机械手领域,具体涉及一种三自由度渐开线球齿轮副。
背景技术:
2.目前传统的齿轮由于只具有一个方向运动的自由度,仅仅可以传递两固定轴之间的平面运动和动力,已经很难满足科技浪潮下催生出的新兴领域的要求,传统的单自由度齿轮无法实现,因此多自由度齿轮的研究便应运而生。
3.中国专利公开号为:cn 103573921 a,专利名称为“一种渐开线球齿轮传动副”,该技术方案提出了一种渐开线球齿轮传动副,该传动副由两个球心位置相对固定,节球面相切的两个球齿轮组成,球冠上分布有渐开线齿轮,同一纬度上的齿沿着纬线均匀分布,不同高度的纬线上的齿数是变化的。该专利提出的球齿轮传动副存在的问题有:首先,并未提出具体的球齿轮齿面的建模方法和具体的齿面方程;其次,不同高度的纬线齿数变化无法保证球齿轮传动时的连续性;而且,其纬线上形成的齿形不是渐开线,这对啮合传动时的间隙以及稳定性有很大影响。
技术实现要素:
4.本发明为了解决以往球形齿轮传动中存在的问题,提供了一种新型的渐开线连续球齿轮副。该球齿轮副啮合传递稳定,不存在传动误差,且具有高的重合度。本发明的球齿轮副同时具有三个自由度,能够实现偏摆,俯仰,自转的不同空间运动,同时在经线和纬线上,齿面交错分布连续,明显的提高了啮合时同时参与啮合的齿对数,提高了传动效率和稳定性。
5.为实现上述目的,本发明提供了如下方案:
6.一种三自由度渐开线球齿轮副,包括一个凹型球齿轮和一个凸型球齿轮,凹型球齿轮上的齿和凸性球齿轮上的齿均由平面渐开线环形齿面和球面渐开线弧形齿面组合而成,
7.所述平面渐开线在球齿轮基球的不同的纬线上生成,球面渐开线在球齿轮基球的不同的经线上生成;齿槽由齿交错分布形成;
8.凸型球齿轮上的齿和齿槽与凹型球齿轮的齿和齿槽结构以及形成方式相同;
9.在啮合传动时,凹型球齿轮的齿完全插入凸型球齿轮的齿槽,凸型球齿轮的齿完全插入凹型球齿轮的齿槽,齿与齿槽相互啮合;
10.所述凸型球齿轮和凹型球齿轮的环形齿沿着基球纬线分布,弧形齿沿着基球经线分布;单个环形齿的左、右手边平面渐开线的起点分别在基球体不同的纬线上,单个弧形齿的的球面渐开线起点在不同的经线上,形成的球齿轮环形齿面和弧形齿面的齿面方程如下:
11.平面渐开线一侧齿面
12.球面渐开线一侧齿面
13.根据节圆完全啮合得到球面渐开线弧形齿面的模数变化为:
[0014][0015]
式中,r
p
为球齿轮节圆半径,rb为球齿轮基球半径,r0为基锥母线长,β为球面渐开线起点纬度值,γ为球面渐开线锥角,ψ球面渐开线极角,l为锥顶到球心距离,z为弧齿齿数,m为弧齿模数,u平面渐开线展角;
[0016]
啮合传动时,球齿轮有多对齿参与啮合,其重合度计算为:
[0017]
环形齿:
[0018]
式中,α
a1
、α
a2
为两个齿轮的齿顶圆压力角,且α
a1
=α
a2
;α
′
为节圆压力角;
[0019]
弧形齿:
[0020]
式中,为有效啮合线长度。
[0021]
本发明的有益效果:
[0022]
本发明提供了一种新型的三自由度球齿轮副,并且提出了完整的齿面建模方法和齿面方程。该球齿轮副无理论传动误差,啮合传递稳定且具有较高的重合度。本发明的球齿轮副所有齿面均为平面渐开线环形齿面和球面渐开线弧形齿面组合而成,齿面交错分布形成齿槽,故在啮合传动时所有齿面均为渐开线齿面。
附图说明
[0023]
图1为本发明新型球齿轮啮合时的结构示意图。
[0024]
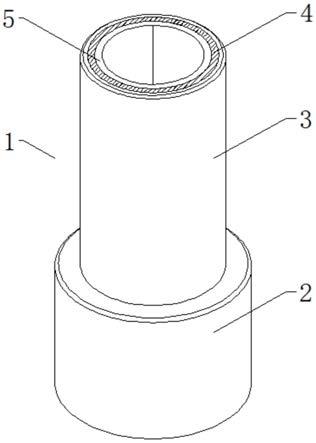
图2为本发明的提供的凹型球齿轮的轴测图。
[0025]
图3为本发明的提供的凸型球齿轮的轴测图。
[0026]
图4为本发明的提供的球齿轮环形齿面和弧形齿面的投影视图。
[0027]
图5为本发明的提供的球齿轮的环形齿面和弧形齿面的示意图。
[0028]
图中:1-中凸型球齿轮,2-中凸型球齿轮独立个齿,3-中凸型齿轮齿槽,4
‑ꢀ
中凹型球齿轮,5-中凹型齿轮齿槽,6-中凹型球齿轮独立个齿,7-中凹型球齿轮凹槽,8-中凸型球齿轮凸台。
具体实施方式
[0029]
具体实施方式一、结合图1至图5说明本实施方式,本实施方式的目的是提供一种啮合传递稳定,不存在传动误差,具有高重合度的新型三自由度渐开线球形齿轮副,能够实
现偏摆,俯仰,自转的三个自由度。并且解决现有技术中存在的球齿轮啮合传动不连续的问题。
[0030]
如图1~3所示,本实施方式提供了一种三自由度渐开线球齿轮副,其中包括一个中凹型球齿轮4和一个中凸型球齿轮1,中凹型球齿轮4上的中凹型球齿轮独立个齿6是由平面渐开线环形齿面和球面渐开线弧形齿面组合而成,中凹型齿轮齿槽5是中凹型球齿轮独立个齿6交错分布形成。
[0031]
中凸型球齿轮1上的中凸型球齿轮独立个齿2和中凸型齿轮齿槽3与中凹型球齿轮4的中凹型球齿轮独立个齿6和中凹型齿轮齿槽5结构相同。
[0032]
在啮合传动时,中凹型球齿轮独立个齿6完全插入中凸型齿轮齿槽3,球齿轮的齿面均为渐开线齿面,故啮合传递稳定。
[0033]
如图4,球齿轮的环形齿沿着基球纬线分布,球锥齿沿着基球经线分布。平面渐开线在球齿轮基球的不同的纬线上生成,球面渐开线在球齿轮基球的不同的经线上生成,也相当于在基圆锥的底圆上生成。其中,单个环形齿的左、右手边平面渐开线的起点分别在基球体不同的纬线上,单个球锥齿的的球面渐开线起点也在不同的经线上。形成的球齿轮环形齿面和锥形齿面的齿面方程如下:
[0034]
平面渐开线一侧齿面
[0035]
球面渐开线一侧齿面
[0036]
结合图4,根据节圆完全啮合可以得出球面渐开线弧形齿面的模数变化为:
[0037][0038]
式中,r
p
为球齿轮节圆半径,rb为球齿轮基球半径,r0为基锥母线长,β为球面渐开线起点纬度值,γ为球面渐开线锥角,ψ球面渐开线极角,l为锥顶到球心距离,z为弧齿齿数,m为弧齿模数,u平面渐开线展角。
[0039]
啮合传动时,球齿轮有多对齿参与啮合,其重合度计算为:
[0040]
环形齿:
[0041]
式中,α
a1
、α
a2
为两个齿轮的齿顶圆压力角,且α
a1
=α
a2
;α
′
为节圆压力角;
[0042]
球锥齿:
[0043]
式中,为有效啮合线长度。
[0044]
本实施方式中,一种三自由度渐开线球齿轮副在啮合传动过程中环形齿和弧形齿同时啮合且啮合齿对数增多,重合度明显提高。
[0045]
如图5所示,球齿轮每个单独齿的齿面均由四个面组成,包括两面平面渐开线环形齿面和两面球面渐开线弧形齿面。
[0046]
本实施方式中,每个单独齿沿着球齿轮基球的经线和纬线均匀连续分布,齿面交错形成齿槽。所述球齿轮对重合度高,传动精度和效率高,稳定性好且易于加工制造。平面渐开线环形齿面沿经线分布,其模数和压力角固定不变。球面渐开线弧形齿面沿纬线分布,其模数和基锥角随纬度分布而变化。单独一球齿轮任一纬线或经线上的齿数相等。球齿轮啮合时平面渐开线环形齿面的节圆和球面渐开线弧形齿面的节圆共球面,恰好达到理论传动与啮合条件。球齿轮啮合时有两种齿面参与啮合,具有传递空间运动和动力的特性。
[0047]
具体实施方式二、本实施方式为具体实施方式一所述的一种三自由度渐开线球齿轮副的具体实施例:下面以具体数据的球齿轮为例,详细论述。
[0048]
球齿轮副环形齿参数为:模数m=2,齿数z1=25,分度圆压力角α=20
°
。此时环形齿分度圆直径d1=50,基圆直径db=47,齿顶圆直径da=54,齿顶圆压力角为αa=29.5
°
。此时即可通过齿面方程计算出环形齿面上各点参数,用上述重合度计算公式可得ε1=1.6。
[0049]
球齿轮副弧形齿参数为:齿数z2=12,分度圆压力角αs=20
°
,节圆直径 d2=50,维度变化取β=0~89
°
,则且sinγb=sinγ
p
*cosαs,可得基锥角γb,通过公式分别求得极角和锥顶至球心距l,此时即可通过上述齿面方程计算出弧形齿齿面上各点参数,利用重合度公式求得:
[0050]
当β=0
°
,ε2无穷大。
[0051]
当β=45
°
,ε2=1.69。
[0052]
当β=80
°
,ε2=1.37。
[0053]
最后通过建模形成得球齿轮如图1-3所示。
[0054]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0055]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。