1.本实用新型涉及城市轨道交通工程测量技术领域,尤其涉及一种城市轨道交通工程轨后水平位移监测测量装置。
背景技术:
2.随着火车和铁路技术的多元化发展,轨道交通呈现出越来越多的类型,不仅遍布于长距离的陆地运输,也广泛运用于中短距离的城市公共交通中,轨道交通普遍具有运量大、速度快、班次密、安全舒适、准点率高、全天候、运费低和节能环保等优点。
3.但是轨道运行时间长了以后两轨道之间的相对距离会发生变化,如果不进行检查修护,会造成较严重后果,而现有常用的检查两个轨道相对距离的测量方式是通过工作人员使用尺子测量,但此测量方式存在缺陷:人工测量工作量大、误差大,测量精度低且效率低。
4.因此,提出了一种城市轨道交通工程轨后水平位移监测测量装置。
技术实现要素:
5.基于现有的测量方式存在缺陷:人工测量工作量大、误差大,测量精度低且效率低的技术问题,本实用新型提出了一种城市轨道交通工程轨后水平位移监测测量装置。
6.本实用新型提出的一种城市轨道交通工程轨后水平位移监测测量装置,包括壳体,所述壳体的内部设置有放置腔体,所述放置腔体的内底壁固定安装有驱动电机,所述驱动电机的输出轴通过联轴器固定安装有传动轴,所述传动轴的一端表面固定安装有水平位移监测测量装置,且水平位移监测测量装置包括第一锥齿轮,所述第一锥齿轮的内壁与传动轴的一端表面固定套接。
7.优选地,所述第一锥齿轮的外表面啮合有第二锥齿轮,所述第二锥齿轮的内壁固定套接有传动杆,所述传动杆的两端外表面均固定连接有用于对传动杆转速进行减速的减速箱,两个所述减速箱的下表面均与放置腔体的内底壁固定连接,所述放置腔体的前内壁和后内壁通过轴承均固定连接有呈对称分布的转杆,所述转杆的一端表面贯穿并延伸至壳体的一侧表面;
8.通过上述技术方案,设置减速箱对传动杆的输出转速进行限速的效果,避免壳体在轨道表面行走速度过快。
9.优选地,其中四个所述转杆以两两为一组共分为两组,一组为前轮,另一组为后轮,其中前轮的两个所述转杆相对的表面通过限位滑槽均滑动套接有连接杆,后轮的两个所述转杆相对的表面通过限位滑槽均与减速箱的输出轴滑动套接;
10.通过上述技术方案,设置前轮的两个转杆与连接杆、后轮的两个转杆与减速箱的输出轴滑动套接,采用滑动套接的方式起到当两轨道之间水平距离出现变大或变小时,具有自适应做出调整的效果。
11.优选地,四个所述限位滑槽的外侧内壁均固定连接有用于对转杆分别在连接杆和
减速箱输出轴内滑动位置进行限位的限位块,且所述限位块分别在四个所述限位滑槽的外侧内壁呈环形阵列分布,四个所述转杆的一端表面均固定连接有用于在轨道表面行走的行走轮,所述壳体的正面和背面均固定连接有检测箱,两个所述检测箱的相对的表面均开设有测量滑槽,两个所述测量滑槽相对的内壁均贯穿并延伸至壳体的正面和背面,两个所述测量滑槽相背的内壁均固定连接有呈对称分布的弹簧,其中四个所述弹簧以两两为一组共分为两组,两个所述测量滑槽相背的内壁中心处固定连接有激光测距传感器,所述激光测距传感器位于其中两个所述弹簧之间,另一所述激光测距传感器位于另外其中两个所述弹簧之间;
12.通过上述技术方案,设置行走轮横截面呈卷盘形状,从而起到使行走轮通过行走轮的啮合槽在轨道表面行走,并通过行走轮的啮合槽对行走轮的运动方向进行限位。
13.优选地,每组所述弹簧的自由端均固定连接有用于与轨道内侧表面接触的感应板,所述放置腔体的内底壁分别固定安装有电池组和控制箱,所述电池组由多个充电锂电池构成,所述壳体的正面固定安装有充电接口;
14.通过上述技术方案,充电接口与电池组配合使用,对电池组的充电锂电池进行补充电量。
15.优选地,所述控制箱的内部分别固定安装有控制器、转换模块和无线传输模块,所述驱动电机、激光传感器、控制器、转换模块、无线传输模块和充电接口均通过导线与电池组电性连接;
16.通过上述技术方案,控制箱对控制器、转换模块和无线传输模块起到固定的效果。
17.本实用新型中的有益效果为:
18.通过设置传动轴的一端表面固定安装有水平位移监测测量装置,且水平位移监测测量装置包括第一锥齿轮,第一锥齿轮的内壁与传动轴的一端表面固定套接,达到了通过激光测距传感器对激光测距传感器检测端端面与感应板外侧表面之间距离进行检测,从而分别精确测得单个轨道的水平位移值,通过转换模块对激光测距传感器实时测得的水平位移值转换后传输给控制器,经控制器处理后通过无线传输模块远程传输给测量人员的检测终端设备,并在检测终端的显示屏上以数据曲线图呈现,从而便于测量人员观察,进而具有大大减轻了测量人员的工作量,测量精度高且效率高的效果。
附图说明
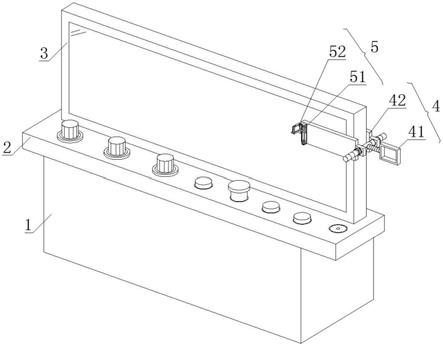
19.图1为本实用新型提出的一种城市轨道交通工程轨后水平位移监测测量装置的示意图;
20.图2为本实用新型提出的一种城市轨道交通工程轨后水平位移监测测量装置的壳体结构爆炸图;
21.图3为本实用新型提出的一种城市轨道交通工程轨后水平位移监测测量装置的限位块结构立体图;
22.图4为本实用新型提出的一种城市轨道交通工程轨后水平位移监测测量装置的壳体结构剖视图。
23.图中:1、壳体;2、放置腔体;3、驱动电机;4、传动轴;5、第一锥齿轮;51、第二锥齿轮;52、传动杆;53、减速箱;54、转杆;55、连接杆;56、限位块;57、限位滑槽;58、行走轮;59、
检测箱;510、测量滑槽;511、弹簧;512、激光测距传感器;513、感应板;514、电池组;515、控制箱;516、充电接口;517、控制器;518、转换模块;519、无线传输模块。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
25.参照图1-4,一种城市轨道交通工程轨后水平位移监测测量装置,包括壳体1,壳体1的内部设置有放置腔体2,放置腔体2的内底壁固定安装有驱动电机3,驱动电机3的输出轴通过联轴器固定安装有传动轴4,传动轴4的一端表面固定安装有水平位移监测测量装置,且水平位移监测测量装置包括第一锥齿轮5,第一锥齿轮5的内壁与传动轴4的一端表面固定套接。
26.进一步地,第一锥齿轮5的外表面啮合有第二锥齿轮51,第二锥齿轮51的内壁固定套接有传动杆52,传动杆52的两端外表面均固定连接有用于对传动杆52转速进行减速的减速箱53,两个减速箱53的下表面均与放置腔体2的内底壁固定连接,放置腔体2的前内壁和后内壁通过轴承均固定连接有呈对称分布的转杆54,转杆54的一端表面贯穿并延伸至壳体1的一侧表面;设置减速箱53对传动杆52的输出转速进行限速的效果,避免壳体在轨道表面行走速度过快。
27.进一步地,其中四个转杆54以两两为一组共分为两组,一组为前轮,另一组为后轮,其中前轮的两个转杆54相对的表面通过限位滑槽57均滑动套接有连接杆55,后轮的两个转杆54相对的表面通过限位滑槽57均与减速箱53的输出轴滑动套接;设置前轮的两个转杆54与连接杆55、后轮的两个转杆54与减速箱53的输出轴滑动套接,采用滑动套接的方式起到当两轨道之间水平距离出现变大或变小时,具有自适应做出调整的效果。
28.进一步地,四个限位滑槽57的外侧内壁均固定连接有用于对转杆54分别在连接杆55和减速箱53输出轴内滑动位置进行限位的限位块56,且限位块56分别在四个限位滑槽57的外侧内壁呈环形阵列分布,四个转杆54的一端表面均固定连接有用于在轨道表面行走的行走轮58,壳体1的正面和背面均固定连接有检测箱59,两个检测箱59的相对的表面均开设有测量滑槽510,两个测量滑槽510相对的内壁均贯穿并延伸至壳体1的正面和背面,两个测量滑槽510相背的内壁均固定连接有呈对称分布的弹簧511,其中四个弹簧511以两两为一组共分为两组,两个测量滑槽510相背的内壁中心处固定连接有激光测距传感器512,激光测距传感器512位于其中两个弹簧511之间,另一激光测距传感器512位于另外其中两个弹簧511之间;设置行走轮58横截面呈卷盘形状,从而起到使行走轮58通过行走轮58的啮合槽在轨道表面行走,并通过行走轮58的啮合槽对行走轮58的运动方向进行限位。
29.进一步地,每组弹簧511的自由端均固定连接有用于与轨道内侧表面接触的感应板513,放置腔体2的内底壁分别固定安装有电池组514和控制箱515,电池组514由多个充电锂电池构成,壳体1的正面固定安装有充电接口516;充电接口516与电池组514配合使用,对电池组514的充电锂电池进行补充电量。
30.进一步地,控制箱515的内部分别固定安装有控制器517、转换模块518和无线传输模块519,驱动电机3、激光传感器、控制器517、转换模块518、无线传输模块519和充电接口
516均通过导线与电池组514电性连接;控制箱515对控制器517、转换模块518和无线传输模块519起到固定的效果。
31.通过设置传动轴4的一端表面固定安装有水平位移监测测量装置,且水平位移监测测量装置包括第一锥齿轮5,第一锥齿轮5的内壁与传动轴4的一端表面固定套接,达到了通过激光测距传感器512对激光测距传感器512检测端端面与感应板513外侧表面之间距离进行检测,从而分别精确测得单个轨道的水平位移值,通过转换模块518对激光测距传感器512实时测得的水平位移值转换后传输给控制器517,经控制器517处理后通过无线传输模块519远程传输给测量人员的检测终端设备,并在检测终端的显示屏上以数据曲线图呈现,从而便于测量人员观察,进而具有大大减轻了测量人员的工作量,测量精度高且效率高的效果。
32.工作原理:使用时,测量人员将壳体1正面和背面的两组行走轮58放置在测量轨道上,并操作感应板513外侧表面与轨道的内侧表面接触,控制驱动电机3和激光测距传感器512通电启动,驱动电机3工作带动传动轴4做旋转运动,带动传动轴4一端表面连接的第一锥齿轮5与第二锥齿轮51啮合,通过第一锥齿轮5与第二锥齿轮51之间的啮合运动,带动第二锥齿轮51内壁连接的传动杆52做旋转运动,通过传动杆52两端表面设置减速箱53对传动杆52转速进行降速,再由减速箱53的输出轴带动后轮两个转杆54带动行走轮58通过行走轮58表面的啮合槽在轨道表面缓慢行走,因感应板513外侧表面与轨道的内侧表面滑动接触,因此,通过激光测距传感器512对激光测距传感器512检测端端面与感应板513外侧表面之间距离进行检测,从而分别精确测得单个轨道的水平位移值,通过转换模块518对激光测距传感器512实时测得的水平位移值转换后传输给控制器517,经控制器517处理后通过无线传输模块519远程传输给测量人员的检测终端设备,并在检测终端的显示屏上以数据曲线图呈现,从而便于测量人员观察。
33.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。