1.本实用新型涉及上料机构领域,特别涉及自动移载上料机构。
背景技术:
2.在进行自动化生产时,零件一般是直线移载往复上料,但是由于产品特性需要摆放于载座,在进行移载的过程中,且需要再设计一套上下移载机构,工作效率低下,无法满足生产的需求。
技术实现要素:
3.本实用新型的主要目的在于提供了自动移载上料机构,通过固定侧板进行整体结构的支撑,并通过驱动机构驱动xy移载机构,通过xy移载机构带动取料机构,实现产品的快速上料,提高了生产效率,降低了生产成本。
4.为实现上述目的,本实用新型采取的技术方案为:
5.移载上料机构,包括固定侧板,驱动机构,xy移载机构和取料机构,其特征在于:所述固定侧板前端面固定安装有xy移载机构,该固定侧板后端面固定安装有驱动机构,该取料机构安装在xy移载机构上,该驱动机构与移载机构固定连接。
6.进一步的,所述驱动机构包括联动臂,旋转轴,丝杠支座,联轴器,减速机和伺服电机,该联动臂固定安装在旋转轴上,该旋转轴上固定套装连接有丝杠支座,且旋转轴可以在丝杠支座内自由旋转,该旋转轴远离联动臂的一端固定连接有联轴器,该联轴器的一端固定连接有减速机,该减速机的输入端固定连接有伺服电机,该丝杠支座固定安装在固定侧板上,减速电机也固定安装在固定侧板上。
7.进一步的,所述xy移载机构包括轨迹板,x轴线轨滑块,滑块安装板,y轴线轨滑块,随动器穿杆,凸轮随动器,该轨迹板固定安装在固定侧板上,该轨迹板上固定安装有x轴线轨滑块,该x轴线轨滑块上固定安装有滑块安装板,该滑块安装板上固定安装有y轴线轨滑块,该y轴线轨滑块上固定安装有随动器穿杆,该随动器穿杆下端固定安装有凸轮随动器,该y轴线轨滑块两端滑动连接有取料机构。
8.进一步的,所述轨迹板上固定开设有限位轨迹槽,该限位轨迹槽与凸轮随动器滑动连接。
9.进一步的,所述轨迹板两端的侧端面上固定安装有光电铝轨,该光电铝轨上固定连接有正负极限传感器。
10.进一步的,所述轨迹板一端的侧端面上还固定安装有光电铝轨,该光电铝轨上固定安装有原点传感器。
11.进一步的,所述y轴线轨滑块上固定安装有传感器安装板,该传感器安装板的两端分别固定安装有感光片a和感光片b。
12.进一步的,所述联动臂上固定开设有限位联动槽,该限位联动槽与xy移载机构滑动连接。
13.更进一步的,所述取料机构包括气缸安装板,气缸定位板和夹爪气缸,气缸安装板上,该气缸定位板上固定安装有气缸定位板,该气缸定位板上固定安装有夹爪气缸。
14.与现有技术相比,本实用新型的有益效果为:
15.本实用新型的主要目的在于提供了自动移载上料机构,通过固定侧板进行整体结构的支撑,并通过驱动机构驱动xy移载机构,通过xy移载机构带动取料机构,实现产品的快速上料,提高了生产效率,降低了生产成本。
附图说明
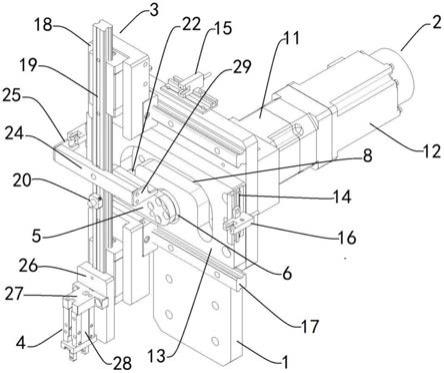
16.图1为本实用新型的立体图;
17.图2为本实用新型的主视图;
18.图3为本实用新型的俯视图。
19.附图标记
20.1.固定侧板;2.驱动机构;3.xy移载机构;4.取料机构;5.联动臂;6.旋转轴;8.限位轨迹槽;9.限位联动槽;10.联轴器;11.减速机;12.伺服电机;13.轨迹板;14.光电铝轨;15.原点传感器;16.正负极限传感器;17.x轴线轨滑块;18.滑块安装板;19.y轴线轨滑块;20.随动器穿杆;22.凸轮随动器;24.传感器安装板;25.感光片a;26.气缸安装板;27.气缸定位板;28.夹爪气缸;29.感光片b。
具体实施方式
21.下面结合附图对本实用新型的较佳实施例作详细阐述,以使本实用新型的优点和特征能更易于被本领域技术人员理解,从而对本实用新型的保护范围作出更为清楚明确的界定。
22.参见图1-3所示,移载上料机构,包括固定侧板1,驱动机构2,xy移载机构3和取料机构4,其特征在于:所述固定侧板1前端面固定安装有xy移载机构3,该固定侧板1后端面固定安装有驱动机构2,该取料机构4安装在xy移载机构3上,该驱动机构2与移载机构固定连接。
23.本实用新型的主要目的在于提供了自动移载上料机构,通过固定侧板1进行整体结构的支撑,并通过驱动机构2驱动xy移载机构3,通过xy移载机构3带动取料机构4,实现产品的快速上料,提高了生产效率,降低了生产成本。
24.所述驱动机构2包括联动臂5,旋转轴6,丝杠支座,联轴器10,减速机11和伺服电机12,该联动臂5固定安装在旋转轴6上,该旋转轴6上固定套装连接有丝杠支座,且旋转轴6可以在丝杠支座内自由旋转,该旋转轴6远离联动臂5的一端固定连接有联轴器10,该联轴器10的一端固定连接有减速机11,该减速机11的输入端固定连接有伺服电机12,该丝杠支座固定安装在固定侧板1上,减速电机也固定安装在固定侧板1上。
25.驱动机构2通过伺服电机12带动联动臂5旋转,期间通过减速机11降低转速,并通过旋转轴6进行力的传递,驱动xy移载机构3移载。
26.所述xy移载机构3包括轨迹板13,x轴线轨滑块17,滑块安装板18,y轴线轨滑块19,随动器穿杆20,凸轮随动器22,该轨迹板13固定安装在固定侧板1上,该轨迹板13上固定安装有x轴线轨滑块17,该x轴线轨滑块17上固定安装有滑块安装板18,该滑块安装板18上固
定安装有y轴线轨滑块19,该y轴线轨滑块19上固定安装有随动器穿杆20,该随动器穿杆20下端固定安装有凸轮随动器22,该y轴线轨滑块19两端滑动连接有取料机构4。
27.所述轨迹板13上固定开设有限位轨迹槽8,该限位轨迹槽8与凸轮随动器22滑动连接。
28.所述轨迹板13两端的侧端面上固定安装有光电铝轨14,该光电铝轨14上固定连接有正负极限传感器16。
29.所述轨迹板13一端的侧端面上还固定安装有光电铝轨14,该光电铝轨14上固定安装有原点传感器15。
30.所述y轴线轨滑块19上固定安装有传感器安装板24,该传感器安装板24的两端分别固定安装有感光片a25和感光片b29。
31.所述联动臂5上固定开设有限位联动槽9,该限位联动槽9与xy移载机构3滑动连接。
32.所述取料机构4包括气缸安装板26,气缸定位板27和夹爪气缸28,气缸安装板26上,该气缸定位板27上固定安装有气缸定位板27,该气缸定位板27上固定安装有夹爪气缸28。
33.xy移载机构3通过轨迹板13上限位轨迹槽8的轨迹移载,通过原点传感器15对xy移载机构3进行校位,通过正负极限传感器16进行定位。
34.所述取料机构4包括气缸安装板26,气缸定位板27和夹爪气缸28,该气缸安装板26安装固定在y轴线轨上,该气缸定位板27安装固定在气缸安装板26上,该气缸定位板27上安装夹爪气缸28。
35.通过夹爪气缸28夹取并摆放产品。
36.以上所述仅为本实用新型的较佳实施方式,本实用新型的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本实用新型所揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。